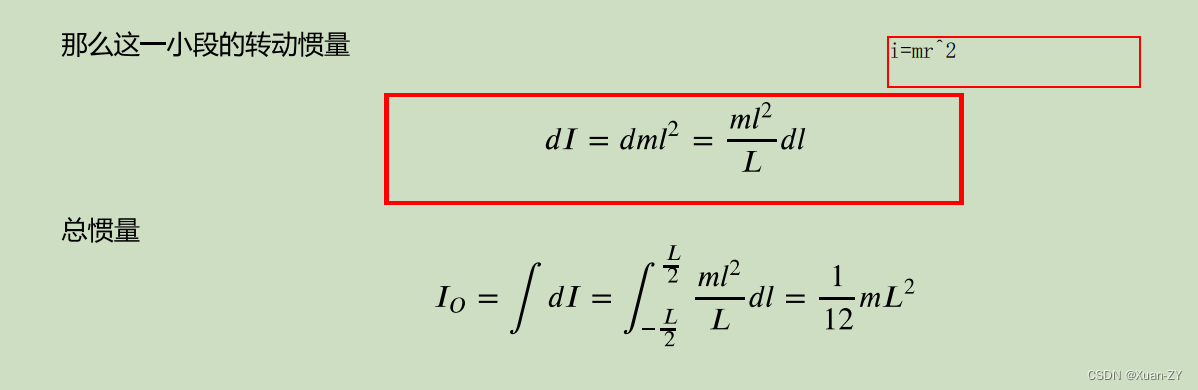
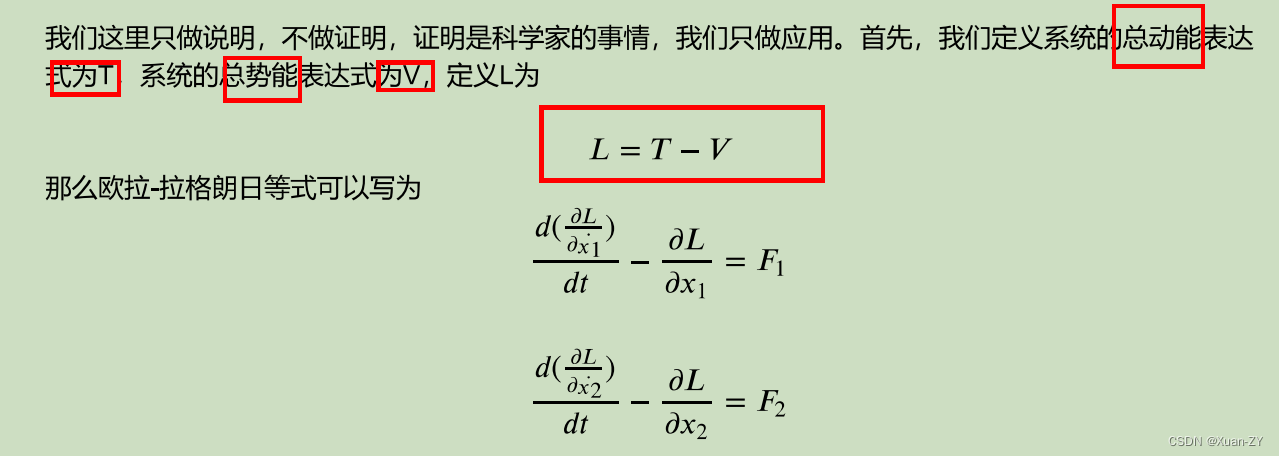
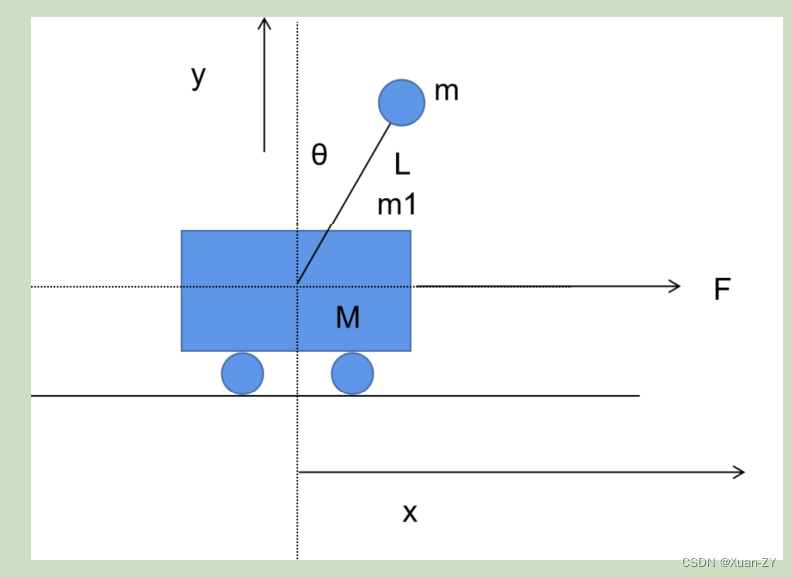
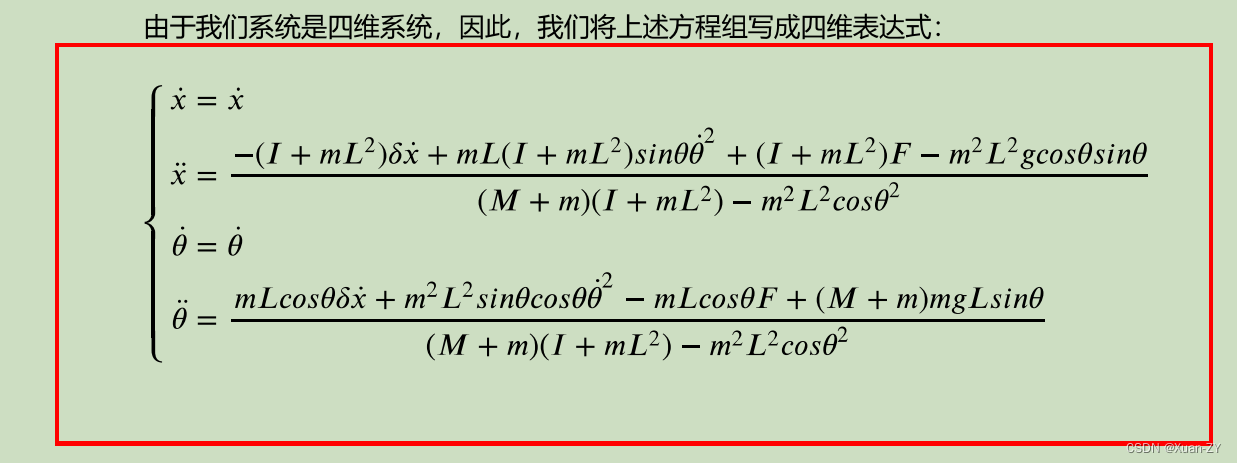
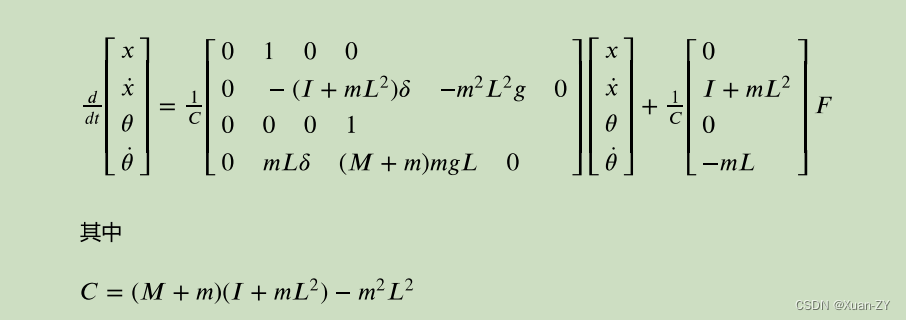
基础公式 转动惯量: 欧拉拉格朗日等式 倒立摆模型建立 由拉格朗日等式推导出微分方程: 也就是 将zdot移到等式左边,化简得到 展开就是: 系统线性化 法一:雅可比矩阵 法二:小角度假设 化简最终得到: 状态反馈配置K 极点配置法 lqr计算




























 2737
2737

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






