







ITK—hessian矩阵计算实现及应用
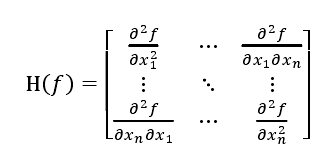
一、hessian矩阵定义
表示一个点各个方向的曲率:
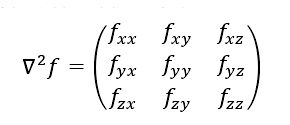
三维空间中的每个点的hessian矩阵为:
二、hessian矩阵特征值
1.特征值
hessian矩阵的三个特征值为lamda1,lamda2,lamda3
特征值越大,在其对应的特征向量方向上,该点的空间曲率越大,将特征值默认按绝对值从小到大排列。
2.特征值的应用
根据特征值间的差异可以判断当前点的空间结构
1、lamda1和lamda2趋近于0,lamda3远小于lamda1和lamda2时,空间结构为薄面体
2、lamda1和lamda2渐渐减小趋近于lamda3,且三个特征值都远小于0时,薄面体趋近于为节点结构
3、lamda1保持不变,lamda2渐渐趋近于lamda3,薄面体结构趋近于管状结构
基于上述特征值的特性,可以用作医学图像上血管增强。
3.基于itk实现hessian矩阵计算
/计算hessian矩阵
typedef itk::HessianRecursiveGaussianImageFilter<ITKImageType > HessianFilterType;
typename HessianFilterType::Pointer hessianFilter = HessianFilterType::New();
hessianFilter->SetInput(input);
hessianFilter->SetSigma(sigma);
hessianFilter->Update();
typedef itk::Image< itk< 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1634
1634











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











