






推导
https://blog.csdn.net/weixin_44176696/article/details/109264961
旋转
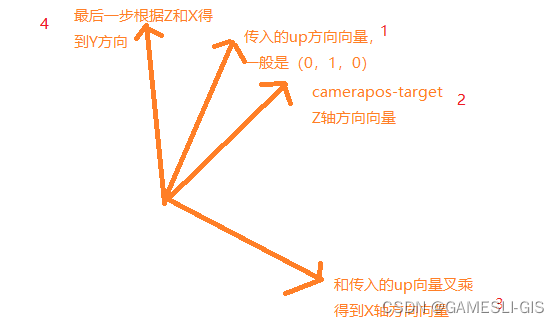
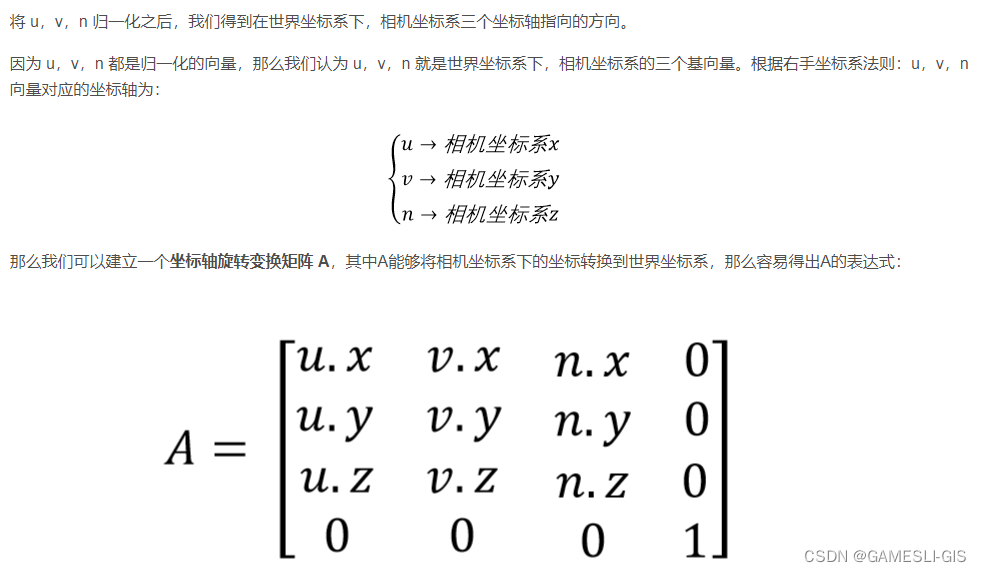
1.相机坐标系下三个基向量的计算
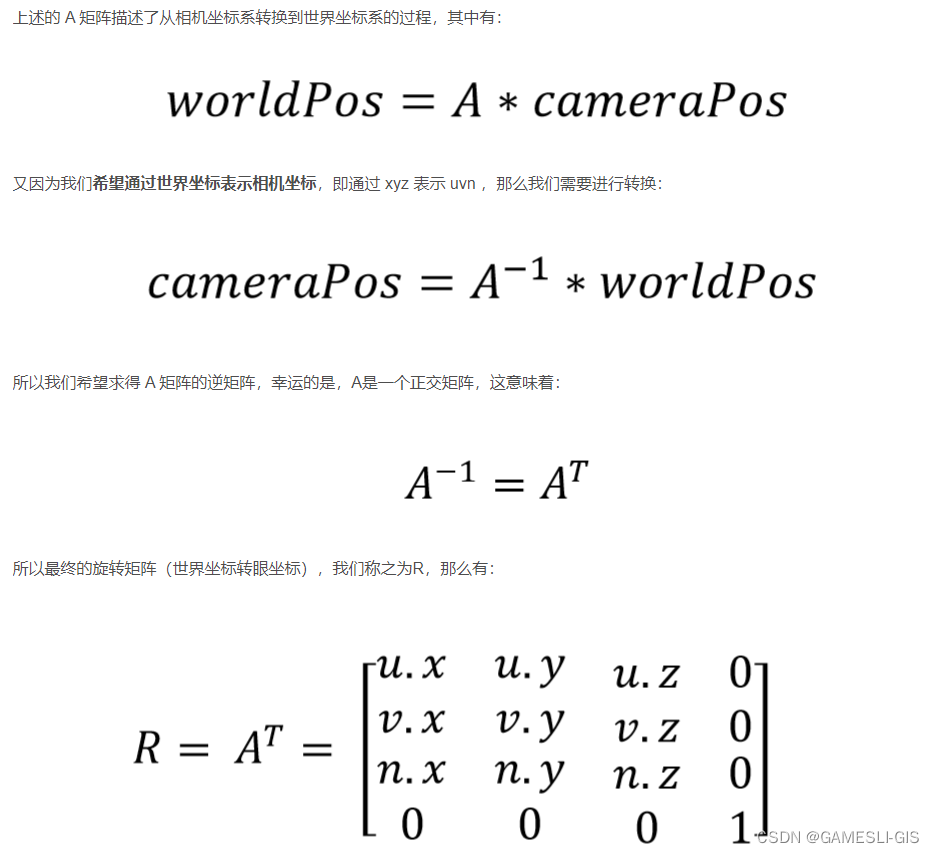
2. 旋转基向量变换
平移
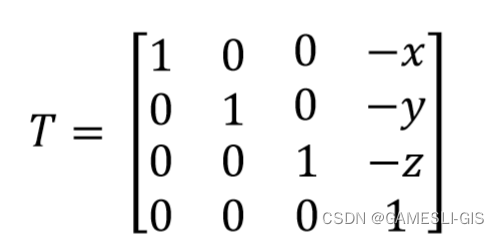
最终的视图矩阵为M, 看这里逆向过去先平移后旋转

备注
1.gl-matrix实现
https://glmatrix.net/docs/mat4.js.html#line1619

https://blog.csdn.net/weixin_44176696/article/details/109264961
最终的视图矩阵为M, 看这里逆向过去先平移后旋转
1.gl-matrix实现
https://glmatrix.net/docs/mat4.js.html#line1619
 599
599











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言























