







一、器件简介
HMC5883L是一款三轴磁场传感器,电子指南针罗盘模块。采用IIC通讯协议。
二、工作原理
传统罗盘用一根被磁化的磁针来感应地球磁场,地球磁场与磁针之间的磁力时磁针转动,直至磁针的两端分别指向地球的磁南极与磁北极。电子罗盘也一样,只不过把磁针换成了磁阻传感器,然后将感受到的地磁信息转换为数字信号输出给用户使用。
用来衡量磁感应强度大小的单位是Tesla或者Gauss(1Tesla=10000Gauss)。
地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的XY分量和一个与当地水平面垂直的Z分量。如果保持电子罗盘和当地的水平面平行,那么罗盘中磁力计就和这三个分量对应起来了。实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。罗盘中的航向角就是方向与磁北的夹角。
三、磁场校准
因为磁场干扰的原因,实际中我们测量的磁力计数据是不准确的,需要进行校准才可以使用。
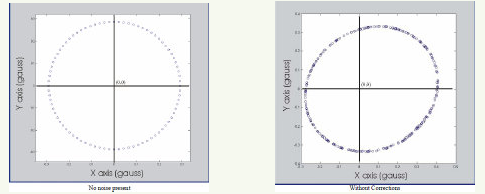
理想效果为图一,实际效果很可能为图二,变成了一个椭球,因此我们需要采用拟合的方法,来修正校准。
修正的输出可以根据下面的方法来计算:
1)在磁场干扰的条件下进行,数据收集设备被旋转360°。
2)数据进行分析,以产生偏差的偏移和灵敏度的比例因子,以补偿所述干扰。
- 从数据中发现的X和Y磁强计的最大输出,以上图为例,即可得到结论:X具有更大的反应。我们设置其比例系数为1。即Xs=1
- Y轴比例系数为 Ys = ( Xmax - Xmin)/( Ymax - Ymin)
- 对于偏置补偿有
- Xb = Xs * [1/2(Xmax - Xmin) - Xmax ]
四、在ArduinoUNO上的基本使用
在ArduinoIDE菜单栏 → 项目 → 加载库 → 管理库
搜索 HMC5883
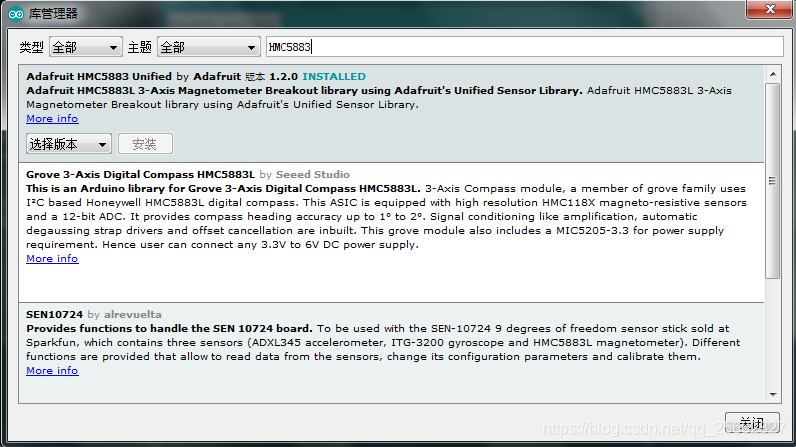
我这安装的第一个。
然后在 ArduinoIDE菜单栏 → 文件 → 示例,找到 Adafruit HMC5883 Unified的唯一一个示例文件,打开。

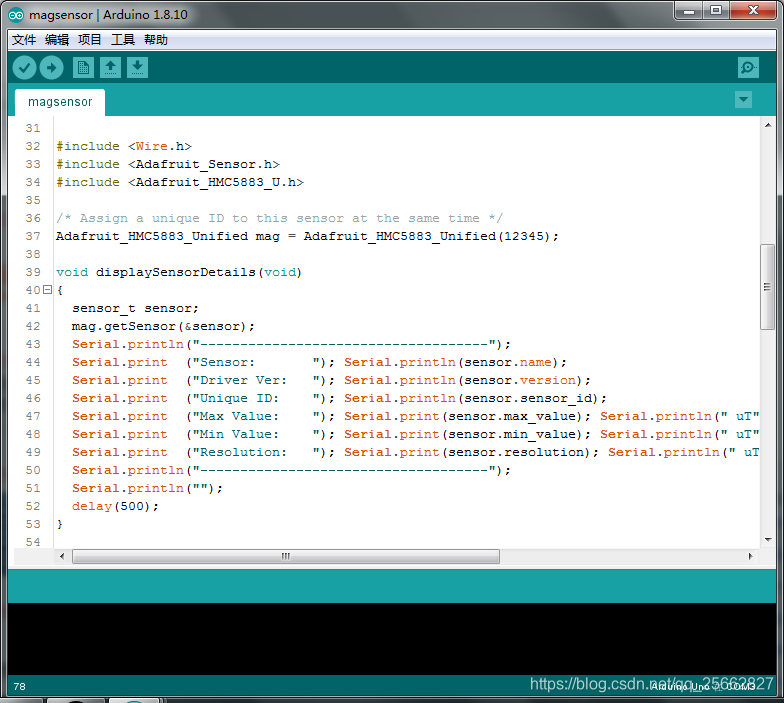
咱们将HMC5883L模块连接到Arduino UNO板子上,跑跑这个程序吧。结果如下:
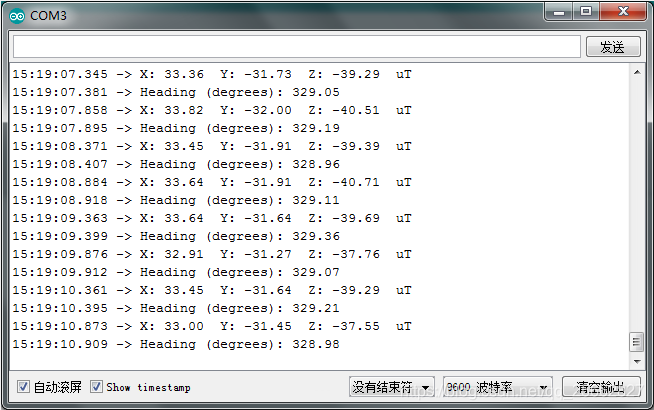
我和手机对比了一下,相差四度,可能是因为手机的磁场干扰到模块了吧。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











