









目录
一、基础要求
1. Linux
2. Python = 3.8.0
3. conda
不会安装环境就参考我的UMI中基础环境部分
简单介绍一下mujoco,MuJoCo(Multi-Joint dynamics with Contact)是一个高性能的物理引擎,专门用于模拟具有接触动力学的多关节系统,在机器人学、强化学习、生物力学和计算机动画等领域被广泛应用。
robosuite 利用了 MuJoCo 强大的物理仿真能力,提供逼真的机器人操作环境。MuJoCo 的高效计算性能使得 robosuite 能够以较高的帧率运行复杂的仿真,这对于训练深度强化学习模型非常重要。
在安装过程中可以发现会自动安装mujuco等库环境

二、安装流程
1. 创建基础环境
创建环境
conda create -n robosuite python=3.8.0
2. 安装robosuite
两种安装方式,pip或者源码安装都可以
更推荐源码安装,因为安装过程会将robosuite作为一个“可编辑的包”安装。这意味着在本地修改代码时,无需重新安装整个包,这些改动会立即生效。这对于开发人员很有用,因为可以在不重新安装的情况下直接测试代码的变动。
在github上下载源码,在robosuite-master文件夹中打开终端并安装
pip install -r requirements.txt
3. 可选安装
同时还提供了几个附加功能,如 OpenAI Gym interfaces, inverse kinematics controllers powered by PyBullet, and teleoperation with SpaceMouse devices。要安装这些附加功能,运行
pip install -r requirements-extra.txt![]()
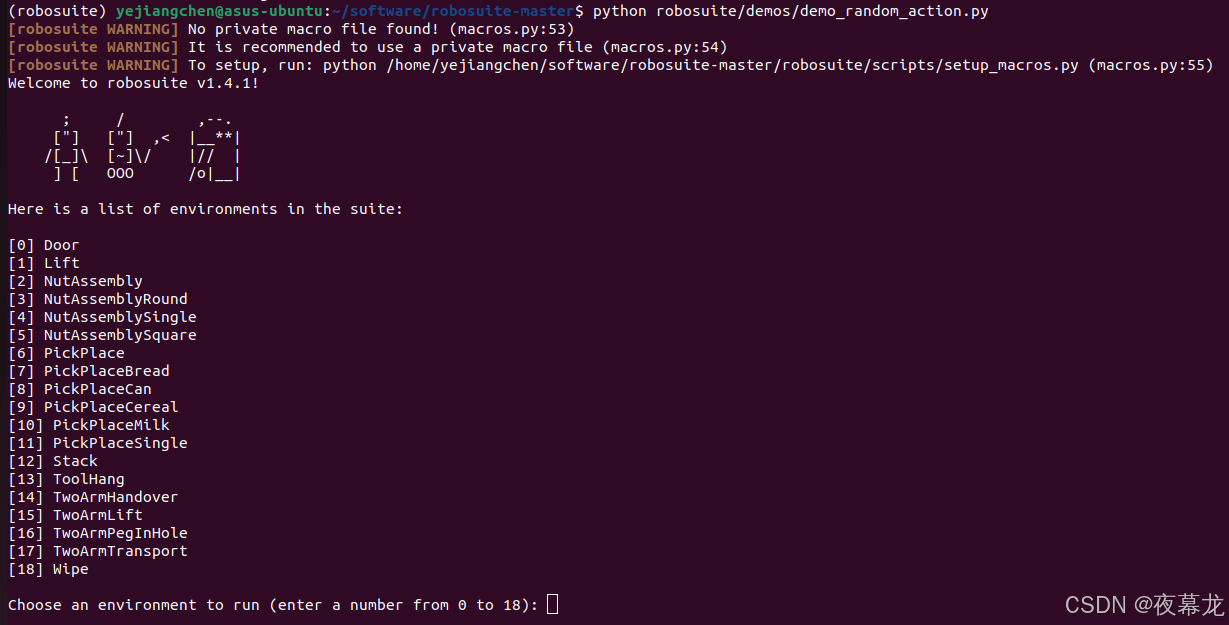
4. 测试安装
python robosuite/demos/demo_random_action.py1. 选择场景:
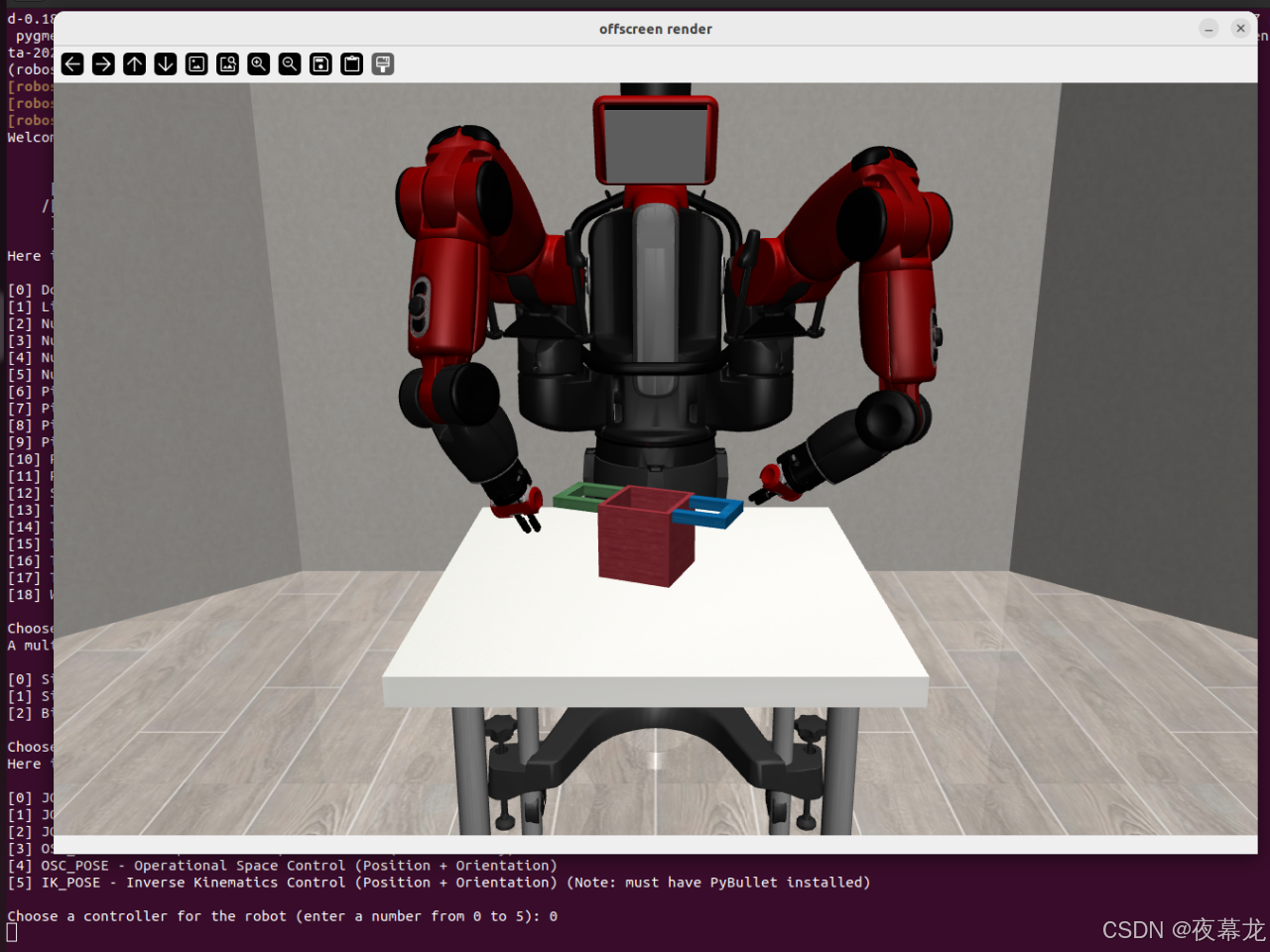
2. 选择单双臂:

3. 选择控制器:
运行生成:


















 1622
1622

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









