






点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达
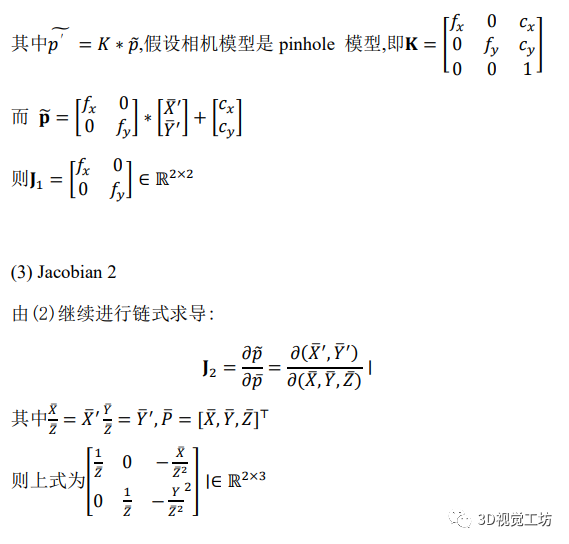
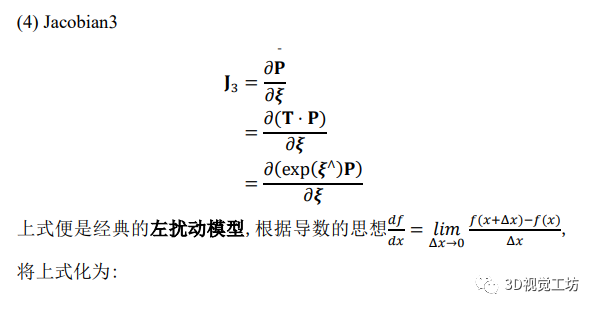
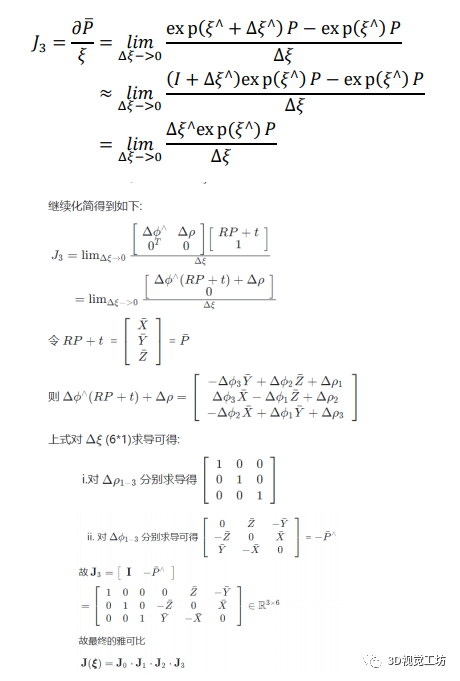
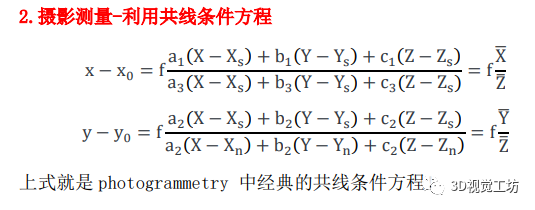
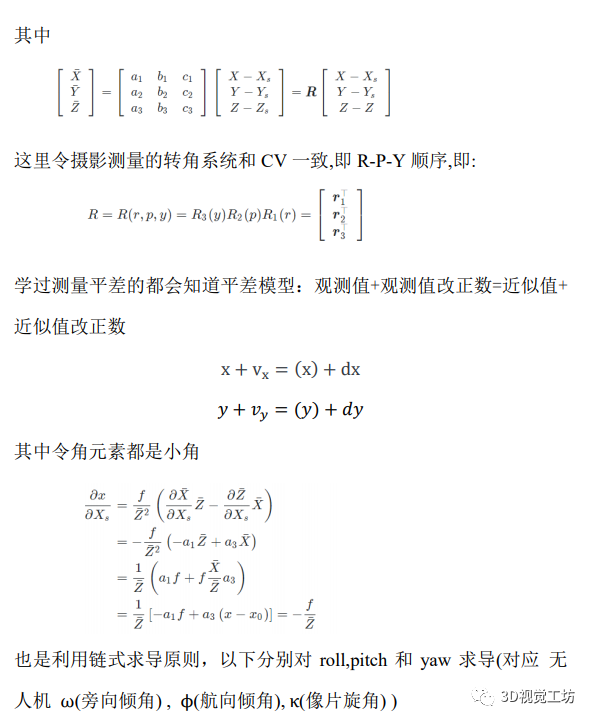
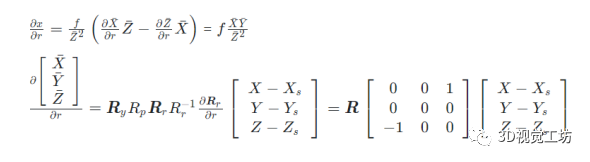
摄影测量作为历史悠久的学科,在3D视觉里面很多算法发挥着重要的作用;而slam 的出现对摄影测量是某种程度上的冲击,但是并不能代表slam领域将会完全取代摄影测量领域,两者应该相互借鉴。以bundle adjustment 为例出发点都是重投影误差,但是slam 雅可比的计算是利用李群,而摄影测量的雅可比的计算是利用共线条件方程(非线性方程)泰勒展开,两者的最终结果相同,但是原理推导上有所差异:
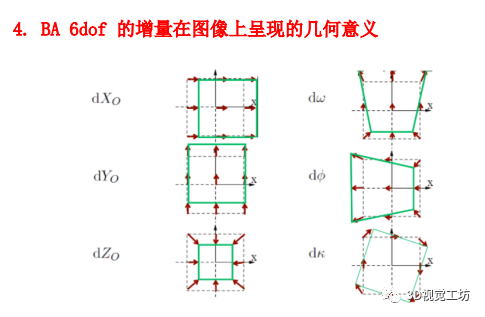
本文从李群和共线方程两个学科角度来解释bundle adjustment,并介绍bundle adjustment后如何精度评定及其pose增量变化在图像上的几何意义,而更多关于bundle adjustment 的代码问题,如:
pose 作为const,只优化3D points 和相机内参和畸变系数.
经典的BA,pose和3Dpoints 以及相机内参和畸变系数都优化
pose部分参数优化,如只优化translation,固定rotation
bundle adjustment 加上GPS 约束
bundle adjustment 加上marker 约束
bundle adjustment 在没有gps、没有gcp的case加上真实世界中实际物体(如桌子长度)的scale 约束
以上等等可以关注本人“视觉三维重建的关键技术与实现-colmap代码解析”课程视频,具体课程介绍可以扫以下二维码:



本文仅做学术分享,如有侵权,请联系删文。















 1340
1340











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









