







点击上方“计算机视觉工坊”,选择“星标”
干货第一时间送达

我们在上篇——汇总|实时性语义分割算法(上篇)中,已经总结了【1】~【12】,这里我们继续。
【13】用于实时语义分割的双向分割网络
《BiSeNet: Bilateral Segmentation Network for Real-time Semantic Segmentation》
链接:https://arxiv.org/pdf/1808.00897.pdf
本文的出发点是因为以往的工作中的1.感受野太小 2.空间信息的损失
关于空间信息
空间信息(Spatial information)主要指的是图像的局部细节信息,尤其是对于边缘丰富的图像。由于卷积网络规模大,一般要求输入图像尺寸较小,需要对原始图像进行Crop或者Resize,这个过程会损失细节的空间信息。通过设置只包含3个网络的Spacial Path,可保留丰富的空间信息,进而将低纬度的空间细节信息与高纬度的信息整合。
网络框架:

右边为特征融合模块(FFM):
Spatial Path 捕获的空间信息编码了绝大多数的丰富细节信息,Context Path 的输出特征主要编码语境信息。两路网络的特征并不相同,因此不能简单地加权两种特征,要用一个独特的特征融合模块以融合这些特征。
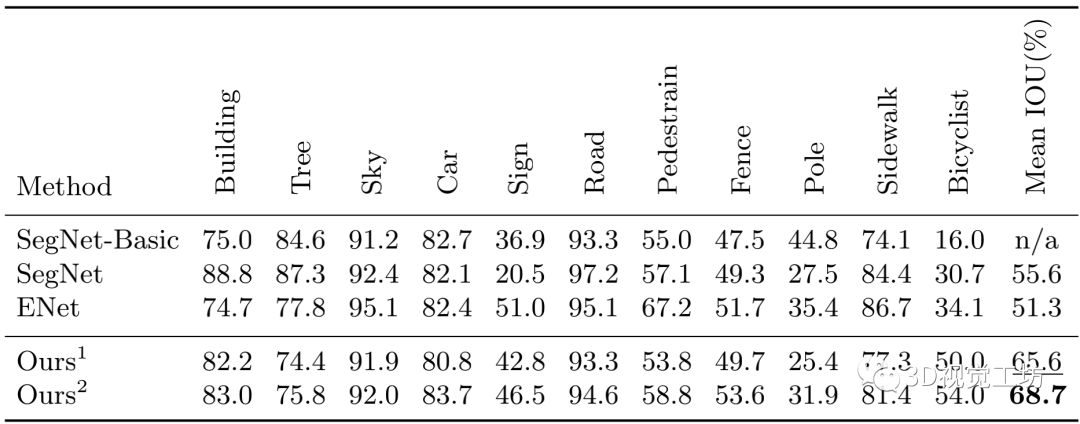
实验结果:
【14】用于实时语义分割的轻量级精细网
《Light-Weight RefineNet for Real-Time Semantic Segmentation》
链接:https://arxiv.org/pdf/1810.03272v1.pdf
论文提出了RefineNet 的轻量化版本Light-Weight RefineNet ,针对实时分割任务,将速度从20FPS提升到了55FPS(GPU,512*512输入,Mean IOU 81.1%,PASCAL VOC测试集)。
网络结构:
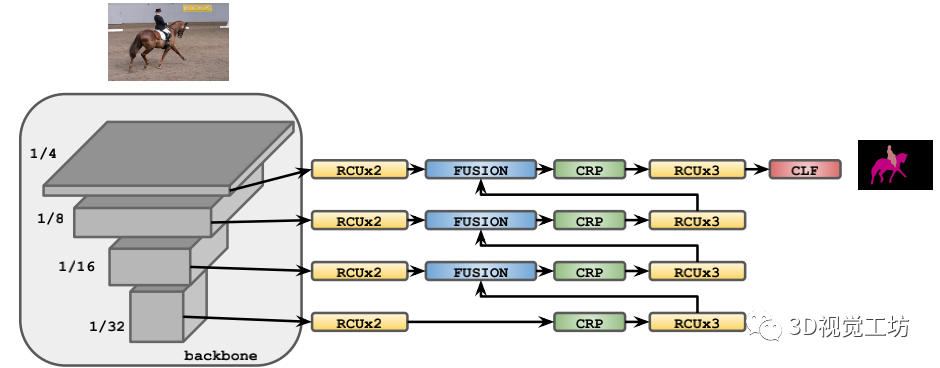
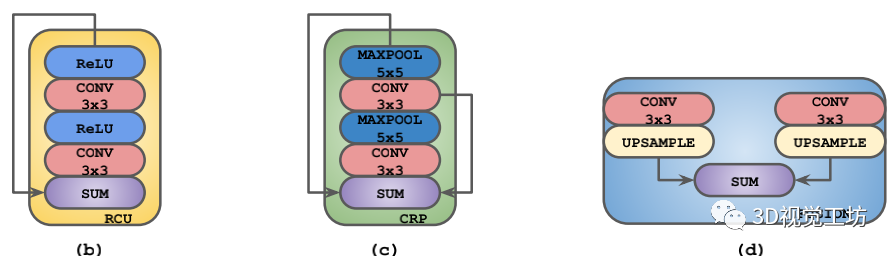
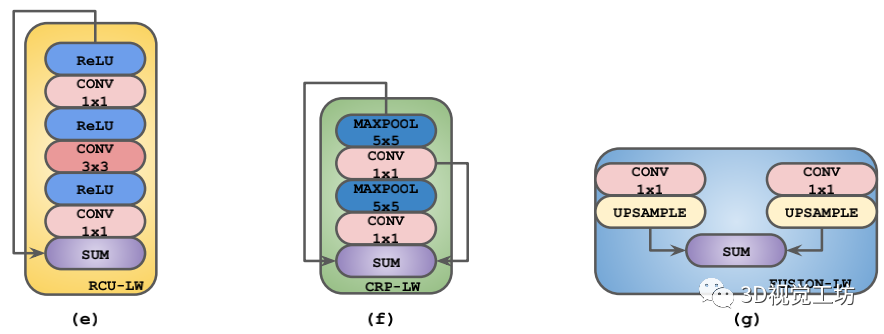
RefineNet 的总体网络结构,分为下采样的encoder部分和上采样的decoder部分。网络主要包含4个模块,RCU,CRP,FUSION,CLF。为了轻量化该网络,分别使用RCU-LW,CRP-LW。
FUSION-LW替换了原始网络的RCU,CRP,FUSION。通过后续的实验作者又发现RCU对于网络的精度提升效果微弱,因此将RCU模块也去掉了。
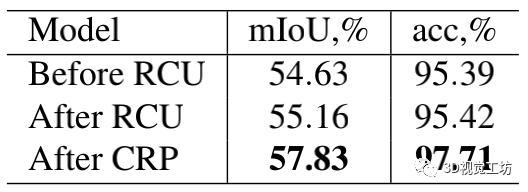
为什么去掉RCU模块,网络精度影响很小?
因为:
(1)虽然RCU模块中的3*3卷积使得网络具有更大的感受野,但是通过shortcut结构,底层特征和高层特征也可以共享。
(2)CRP模块也可以获得上下文的信息。
可以从下图看出,RCU模块对精度提升微弱,而CRP模块对精度提升明显。
模型参数比较:

基于ResNet101的基础结构的RefineNet,第一个为传统的RefineNet,第二个为带RCU的RefineNet,第三个为不带RCU的RefineNet。可见RefineNet-101-LW相比RefineNet-101
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2191
2191











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









