






作者丨rainforest wang@知乎(已授权)
来源丨https://zhuanlan.zhihu.com/p/416704427
编辑丨极市平台
导读
本文介绍了一篇被ICCV2021录用为Oral Presentation的工作,利用空间冗余性实现高效视频识别,提出了一个通用框架AdaFocus:在同等精度的条件下,相较AR-Net将计算开销降低了2.1-3.2倍,将TSM的GPU实测推理速度加快了1.4倍。
本文主要介绍我们被ICCV-2021会议录用为Oral Presentation的一篇文章:
Adaptive Focus for Efficient Video Recognition
原文链接:https://arxiv.org/pdf/2105.03245.pdf
代码及预训练模型链接:https://github.com/blackfeather-wang/AdaFocus
B站视频简介:https://www.bilibili.com/video/BV1vb4y1a7sD/
欢迎大家试用和吐槽。
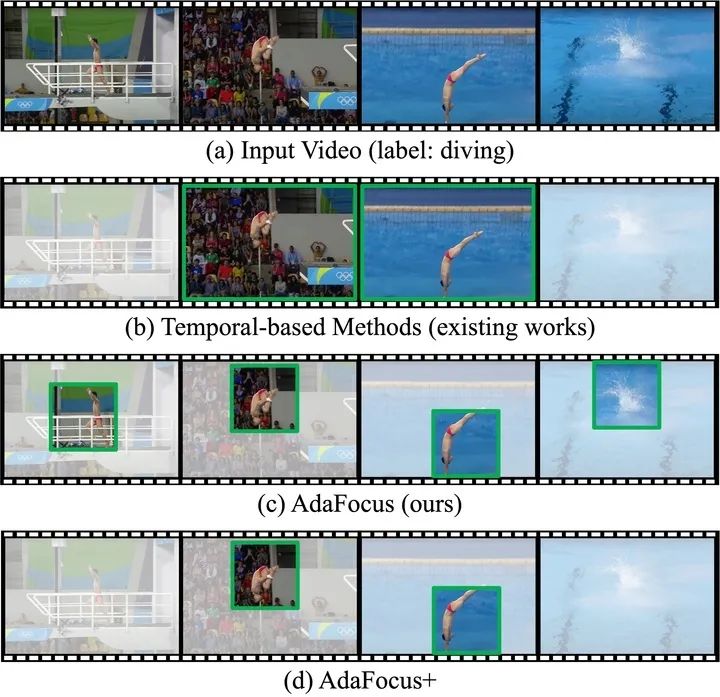
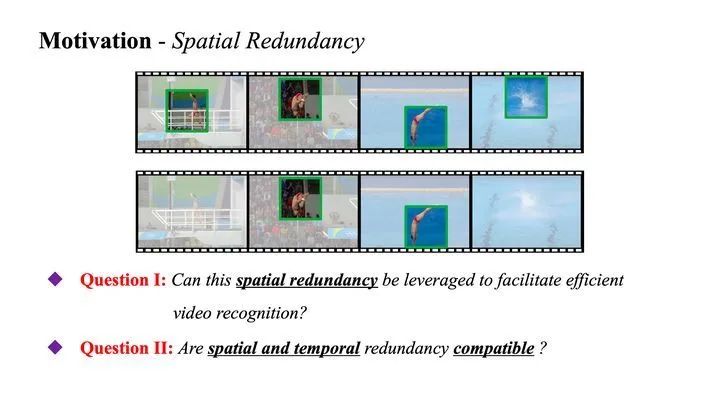
太长不看版:现有高效视频识别算法往往关注于降低视频的时间冗余性(即将计算集中于视频的部分关键帧),如图1 (b)。本文则发现,降低视频的空间冗余性(即寻找和重点处理视频帧中最关键的图像区域),如图1 (c),同样是一种效果显著、值得探索的方法;且后者与前者有效互补(即完全可以同时建模时空冗余性,例如关注于关键帧中的关键区域),如图1 (d)。在方法上,本文提出了一个通用于大多数网络的AdaFocus框架,在同等精度的条件下,相较AR-Net (ECCV-2020)将计算开销降低了2.1-3.2倍,将TSM的GPU实测推理速度加快了1.4倍。
1. Introduction (研究动机及简介)
相较于图像,视频识别是一个分布范围更广、应用场景更多的任务。如下图所示,每分钟,即有超过300小时的视频上传至YouTube;至2022年,超过82%的消费互联网流量将由在线视频组成。自动识别这些海量视频中的人类行为、事件、紧急情况等内容,对于视频推荐、监控等受众广泛的实际应用具有重要意义。

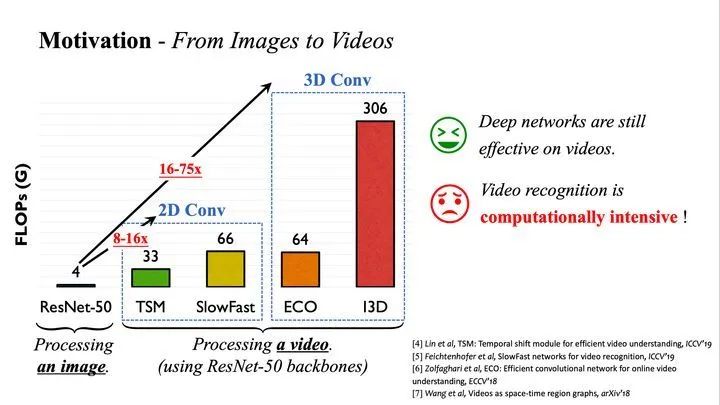
近年来,已有很多基于深度学习的视频识别算法取得了较佳的性能,如TSM、SlowFast、I3D等。然而,一个严重的问题是,相较于图像,使用深度神经网络处理视频通常会引入很大的计算开销。如下图所示,将ResNet-50应用于视频识别将使运算量(FLOPs)扩大8-75倍。
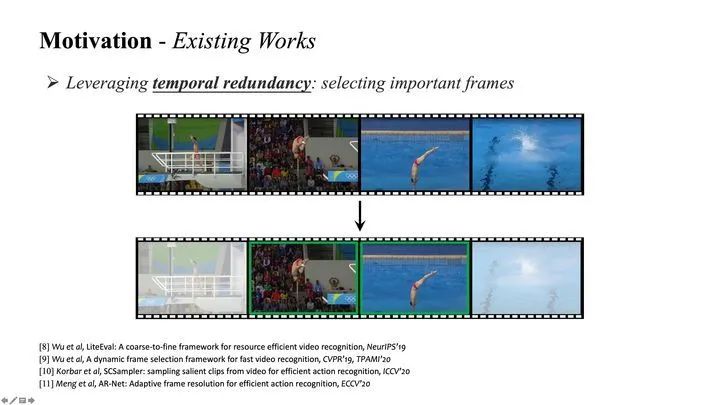
因此,一个关键问题在于,如何降低视频识别模型的计算开销。一个非常自然的想法是从视频的时间维度入手:一方面,相邻的视频帧之间往往具有较大的相似性,逐帧处理将引入冗余计算;另一方面,并非全部视频帧的内容都与识别任务相关。现有工作大多从这一时间冗余性出发,动态寻找视频中的若干关键帧进行重点处理,以降低计算成本,如下图所示。
但是,值得注意的一点是,我们发现,目前尚未有工作关注于视频中的空间冗余性。具体而言,在每一帧视频中,事实上只有一部分空间区域与识别任务相关,例如下图中的运动员、起跳动作、水花等。

出于这一点,本文以回答图6中的两个问题作为主线:
空间冗余性是否可以用于实现高效视频识别? 假如我们能找到每一视频帧中的关键区域,并将主要的计算集中于这些更有价值的部分,而尽可能略过其他任务相关信息较少的区域,理论上,我们就可以显著降低网络的计算开销(事实上,我们之前基于单张图像验证过类似做法的效果:NeurIPS 2020 | Glance and Focus: 通用、高效的神经网络自适应推理框架)https://zhuanlan.zhihu.com/p/266306870
空间、时间冗余性是否互补? 若上述假设成立的话,它应当可与现存的、基于时间冗余性的工作相结合,因为我们完全可以先找到少数关键帧,再仅在这些帧中寻找关键的图像区域进行重点处理。
2. Method (方法详述)
首先为了回答问题1,我们设计了一个AdaFocus框架,其结构如下图所示
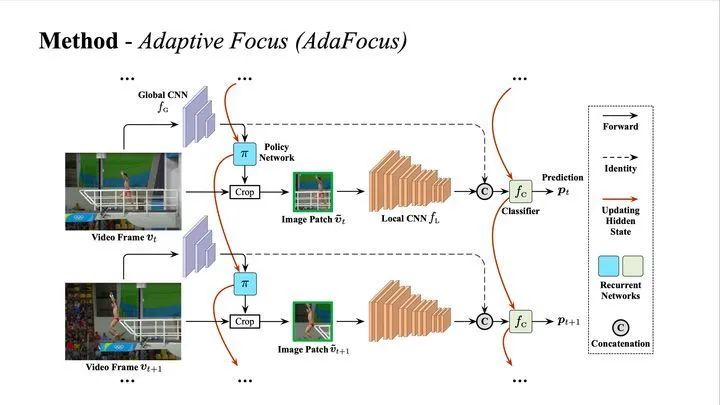
此处我们假设视频帧按时间次序逐个输入网络,AdaFocus使用四个组件对其进行处理,
全局CNN(Global CNN)是一个轻量化的卷积网络(例如MobileNet-V2),用于以低成本对每一帧视频进行粗略处理,获取其空间分布信息。
策略网络 (Policy Network)是一个循环神经网络(RNN),以的提取出的特征图作为输入,用于整合到目前为止所有视频帧的信息,进而决定当前帧中包含最重要信息的一个图像小块(patch)的位置。值得注意的是由于取得patch的crop操作不可求导,是使用强化学习中的策略梯度方法(policy gradient)训练的。
局部CNN (Local CNN)是一个容量大、准确率高但参数量和计算开销较大的卷积网络(例如ResNet),仅处理策略网络 选择出的局部patch,由于patch的空间尺寸小于原图,处理其的计算开销显著低于处理整个视频帧。
分类器 (Classifier)为另一个循环神经网络(RNN),输入为和 输出特征的并联,用于整合过去所有视频帧的信息,以得到目前最优的识别结果 ( 表示帧序号)。
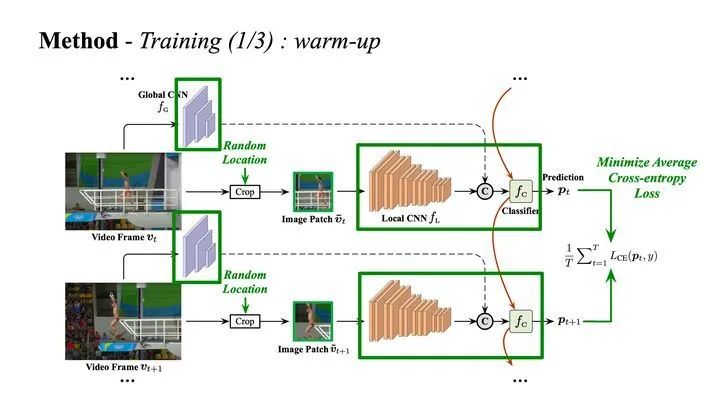
AdaFocus的训练分为三个阶段。在第一阶段,我们移除策略网络 ,随机选取局部patch,训练网络的分类部分最小化交叉熵损失,如下图所示。这一阶段意在训练网络从随机的patch序列中自适应提取信息,我们进而便可以根据分类部分网络的行为判断不同patch的重要性。
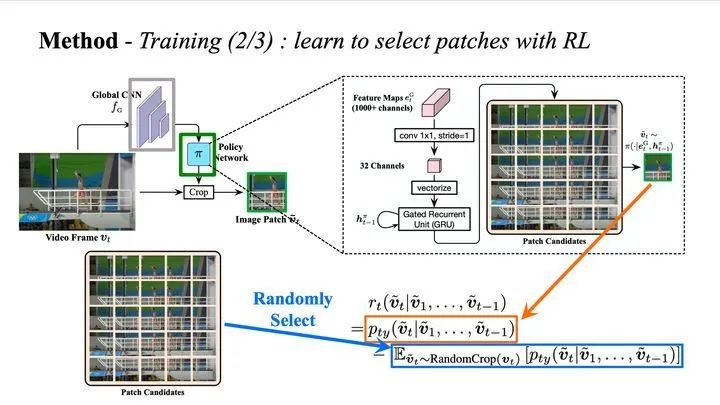
在第二阶段,我们引入随机初始化的策略网络 ,将之建模为智能体(agent),固定分类部分,以强化学习算法对进行训练,优化目标为最大化折扣奖励函数。
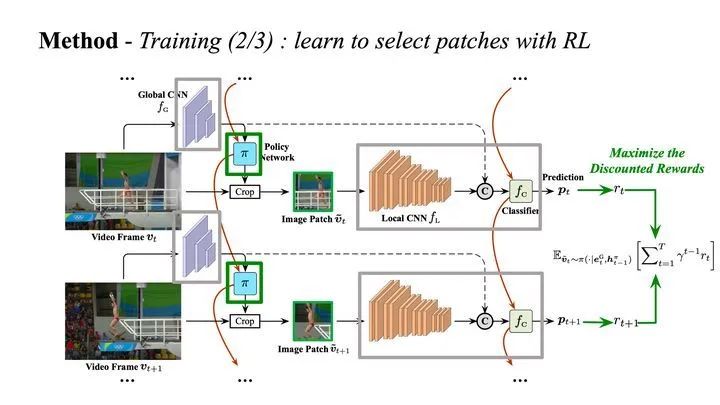
关于强化学习的具体细节,请参见我们的paper。粗略而言,我们将选择patch建模为一个在若干个候选patch上的多类离散分布,每一类别的概率由策略网络 的输出决定。训练时,我们随机从这个分布中采样出一个动作,并得到一个对应的奖励函数值(reward),reward较大的动作将受到鼓励,reward较低的动作则将受到抑制。我们将reward的值定义为给定动作在标签类别上的confidence上升的效果与随机选择patch所得效果的比较。
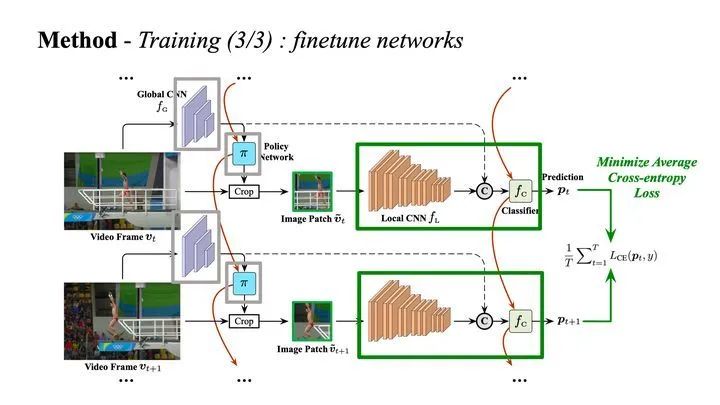
在第三个阶段,我们固定阶段二学到的patch选择策略,对AdaFocus的分类部分进行微调。这一阶段并非必须,但可以些微提升网络的分类性能。
到目前为止,AdaFocus对每一帧视频花费的计算量是均等的,换言之,其只建模了空间冗余性。为了探索空间、时间冗余性是否互补的问题,我们提出了增强版本的AdaFocus,AdaFocus+。具体而言,我们加入了一个与 结构完全相同的策略网络 ,用于判断对于每一帧视频是否激活 处理由 选择出的局部patch,如下图所示。
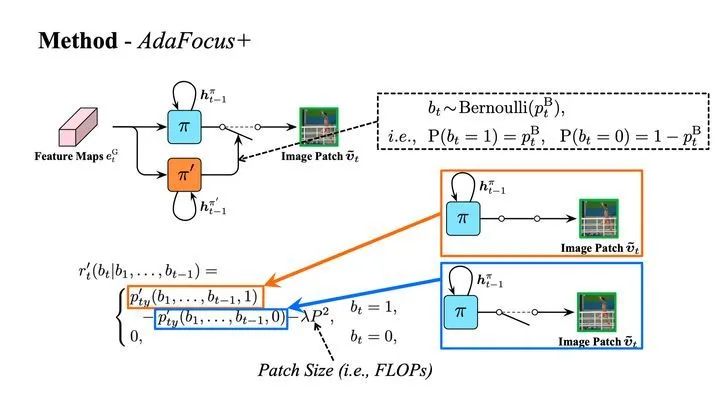
可以在训练阶段二中, 的训练完成后采用与其相同的强化学习算法进行训练。 的输出决定了一个二分类分布(Bernoulli distribution)的参数,训练时,我们随机从该分布中采样,并在采样得激活 时将该操作所带来的标签类别上的confidence上升的效果与激活 的计算开销进行比较。只有当这一比较结果为正时,激活 这一动作才会得到鼓励。
关于AdaFocus和AdaFocus+的更多细节,由于比较繁杂,不在这里赘述,可以参阅我们的paper~
3. Experiments (实验结果)
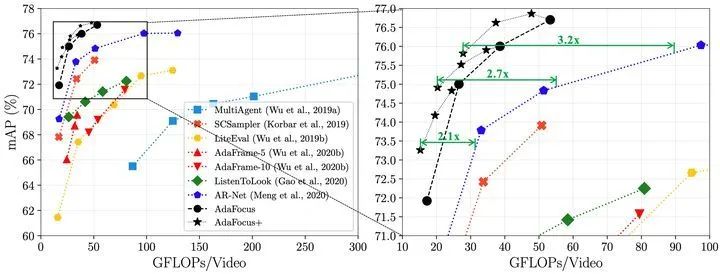
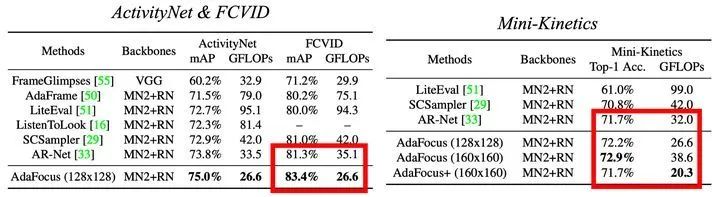
与其他高效视频识别框架的比较(基于ActivityNet)
在FCVID和Mini-Kinetics上的结果
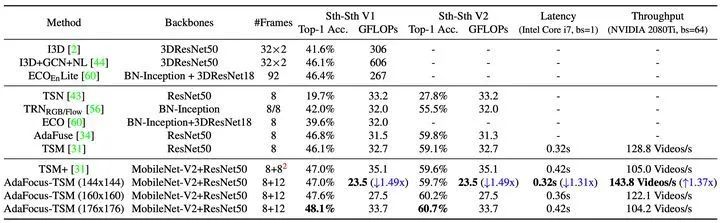
基于TSM部署AdaFocus的结果,包含理论计算开销、CPU和GPU的实际测速结果
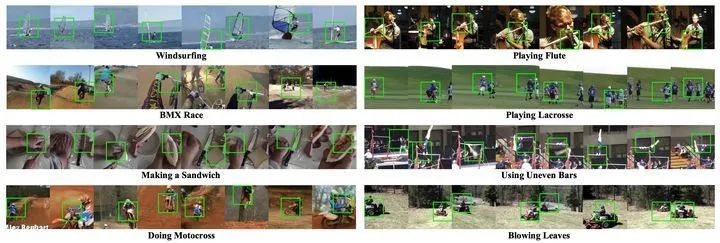
AdaFocus的可视化结果,绿色方框代表我们的方法在每一帧选择的patch,可见AdaFocus成功定位到视频帧中的任务相关区域,例如帆船、自行车、做三明治的手部动作、摩托、长笛、运动员等。
关于网络结构设计的细节、奖励函数的设计、习得patch选择策略的有效性,我们还提供了详尽的消融实验(Ablation Study)结果,细节请参阅我们的paper。
四.Conclusion(结语)
总结来说,这项工作的贡献点在于:
(1)在现有的基于时间冗余性的方法之外,思考利用空间冗余性实现高效视频识别;
(2)基于强化学习,提出了一种在理论上和实测速度上效果都比较明显的通用框架,AdaFocus;
(3)在五个数据集上进行了实验,包括与其他通用框架的比较和部署于现有高效识别网络(例如TSM)上的效果等。
欢迎大家follow我们的工作~。
@InProceedings{Wang_2021_ICCV,
author = {Wang, Yulin and Chen, Zhaoxi and Jiang, Haojun and Song, Shiji and Han, Yizeng and Huang, Gao},
title = {Adaptive Focus for Efficient Video Recognition},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
month = {October},
year = {2021}
}如有任何问题,欢迎留言或者给我发邮件,附上我的主页链接
https://www.rainforest-wang.cool/
本文仅做学术分享,如有侵权,请联系删文。
下载1
在「计算机视觉工坊」公众号后台回复:深度学习,即可下载深度学习算法、3D深度学习、深度学习框架、目标检测、GAN等相关内容近30本pdf书籍。
下载2
在「计算机视觉工坊」公众号后台回复:计算机视觉,即可下载计算机视觉相关17本pdf书籍,包含计算机视觉算法、Python视觉实战、Opencv3.0学习等。
下载3
在「计算机视觉工坊」公众号后台回复:SLAM,即可下载独家SLAM相关视频课程,包含视觉SLAM、激光SLAM精品课程。
重磅!计算机视觉工坊-学习交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有ORB-SLAM系列源码学习、3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、深度估计、学术交流、求职交流等微信群,请扫描下面微信号加群,备注:”研究方向+学校/公司+昵称“,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进去相关微信群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列三维点云系列结构光系列、手眼标定、相机标定、orb-slam3知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近2000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款
圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~ 















 1085
1085











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









