






数学通用
卡尔曼滤波状态预测的协方差矩阵如何计算?

这个是状态方程(线性的,非线性的要泰勒展开线性化)

这个是噪声的模型(默认是服从标准正态分布)

这个是预测,也就是题目问到的内容,协方差矩阵的预测值,类似于D(ax+y) = a^2 D(x)+D(y)【假设x,y相互独立】。

![]()

以上两个式子是更新方程,9.16;9.17是K值的获取步骤

扩展
扩展卡尔曼滤波更新方程。原理其实就是矩阵泰勒展开,然后因为不是线性的也没法写成Ax+b这样的形式了;并且向量的一阶导数,雅可比矩阵(还好不用海森)它的计算还是后面要提到的,这里就先给出结论式:



简述PnP原理和适用场景
PnP是求解3D到2D点对的运动方法。已知n个3D点坐标和其对应的2D相机投影点坐标,求解相机位姿,其中至少需要3对点(3D-2D)可求解(平移+旋转一共6个自由度)。
其中求解方法有:DLT(直接线性变换法,至少6对点,因为旋转平移矩阵3*4个未知量),P3P(余弦定理、三角形相似),EPnP等,也可以使用优化法。
应用场景:视觉里程计跟踪过程中,相机的位姿估计;
光流跟踪在快速运动过程中,跟踪容易失败,有什么解决方法?
原因:快速运动跟踪失败原因是相邻两帧之间相同特征点距离过远(光流的假设是像素梯度在某一局部窗口内有效),光流跟踪不到,因此失败。
解决方法:光流金字塔。
在特征点法slam中,如何增强特征描述子之间的区分度?
增加方向等信息,提高描述子的区分度。例如BRIEF描述子增加了方向信息,改进后的Steer BRIEF具有旋转不变性。
常用库
Eigen
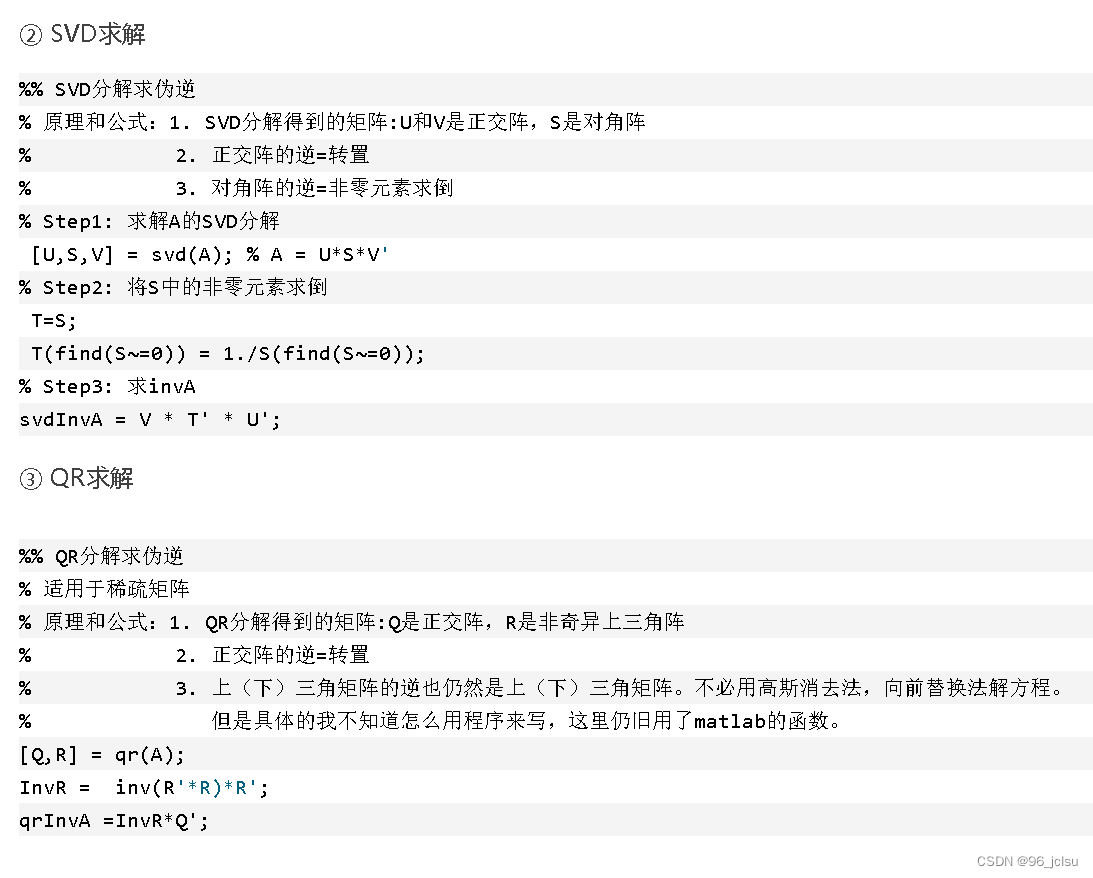
矩阵求逆方法(直接法,qr分解,svd分解)
直接法:
mat.inverse()
qr分解或者svd分解:















 1589
1589











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









