




 小米在8月10日的新品发布会上推出了首款机器狗CyberDog,昵称“铁蛋”。这款机器狗能跳舞、识别观众并打招呼,甚至能后空翻。基于MIT的开源代码和ROS2平台,小米在短时间内打造了一款具备高完成度的机器狗。尽管硬件和软件都是基于开源技术,但小米的创新在于将它们整合成一个功能丰富的四足机器人。目前市场上的机器狗价格高昂,而小米9999元的定价为爱好者提供了更多机会。未来,机械狗有望在导盲、导航等领域发挥作用,进一步融入日常生活。
小米在8月10日的新品发布会上推出了首款机器狗CyberDog,昵称“铁蛋”。这款机器狗能跳舞、识别观众并打招呼,甚至能后空翻。基于MIT的开源代码和ROS2平台,小米在短时间内打造了一款具备高完成度的机器狗。尽管硬件和软件都是基于开源技术,但小米的创新在于将它们整合成一个功能丰富的四足机器人。目前市场上的机器狗价格高昂,而小米9999元的定价为爱好者提供了更多机会。未来,机械狗有望在导盲、导航等领域发挥作用,进一步融入日常生活。
8月10日是小米的新品发布会,雷军除了协新的MIX 4亮相之外,还发布了小米的第一款机器狗CyberDog,中文名叫**“铁蛋”**。之所以取这么大众的名字,原因是因为小米内部希望它比较命硬,能够使得这个项目成功。
1 .正式亮相
在发布会上,雷军演示以下几个场景:
- 1.随着音乐跳舞:

- 2.与观众打招呼:这里有个有趣的地方在于,它能够自动识别观众的位置,然后站立起来打招呼。
- 3.帅帅的后空翻
最后,雷军在演示中伸手摸它的狗头,它会自己主动低下头来让人抚摸;在演示完之后,这只狗主动跟着雷军往舞台中央走,雷军在示意它不要跟着之后,它会自行走开。这种完成度极高的机器狗,售价仅为9999元,确实是广大发烧友的一次入手机会。
2.身体构造
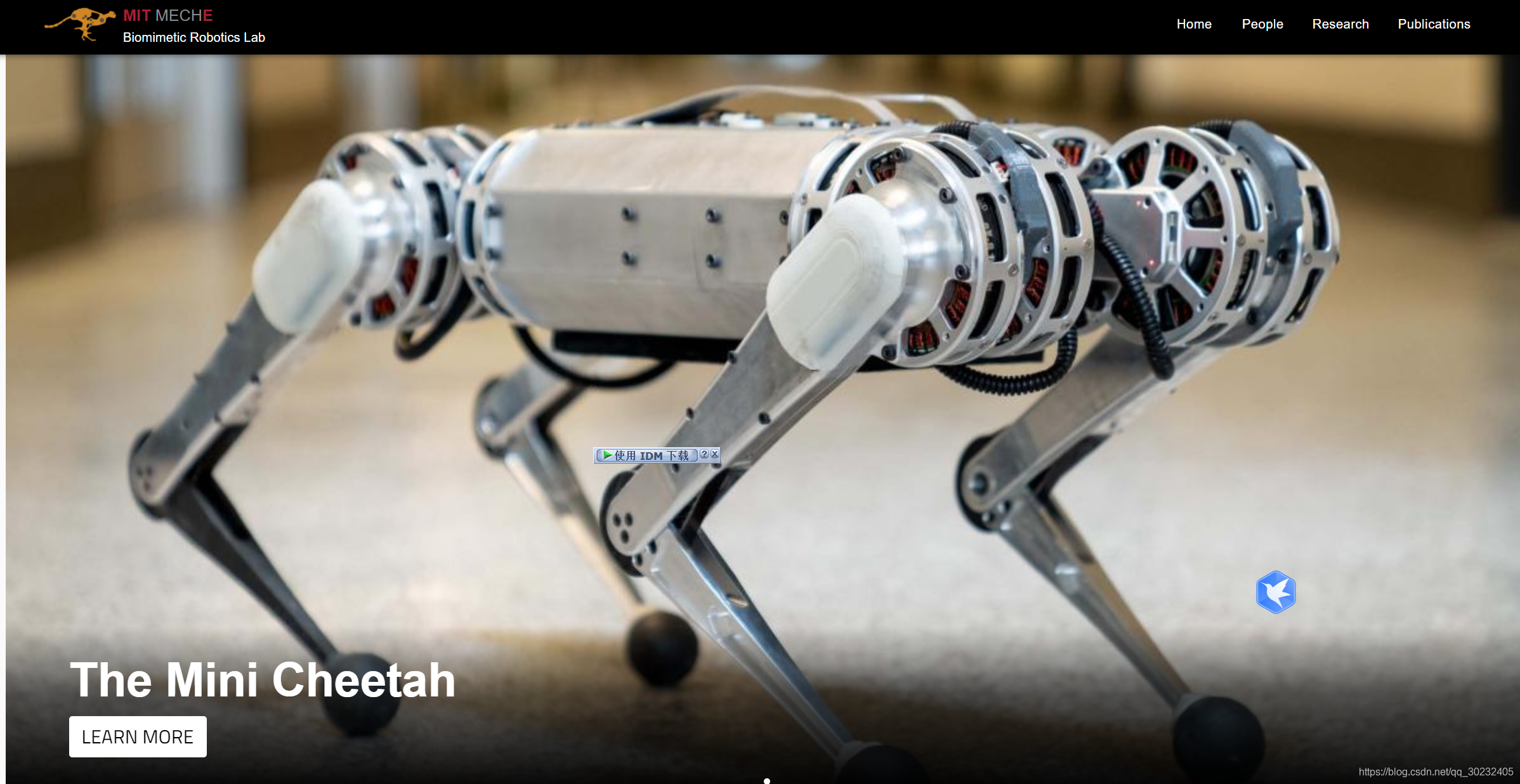
软件方面,小米主要使用了MIT的开源代码Mini Cheetah 以及 ROS 2的开源平台,在10个月的时间内,搭建出一套比较成熟的软件体系。尽管基于的是开源代码,但是小米能够在短短时间内就造成一个较为完整的机器狗,确实不容易。
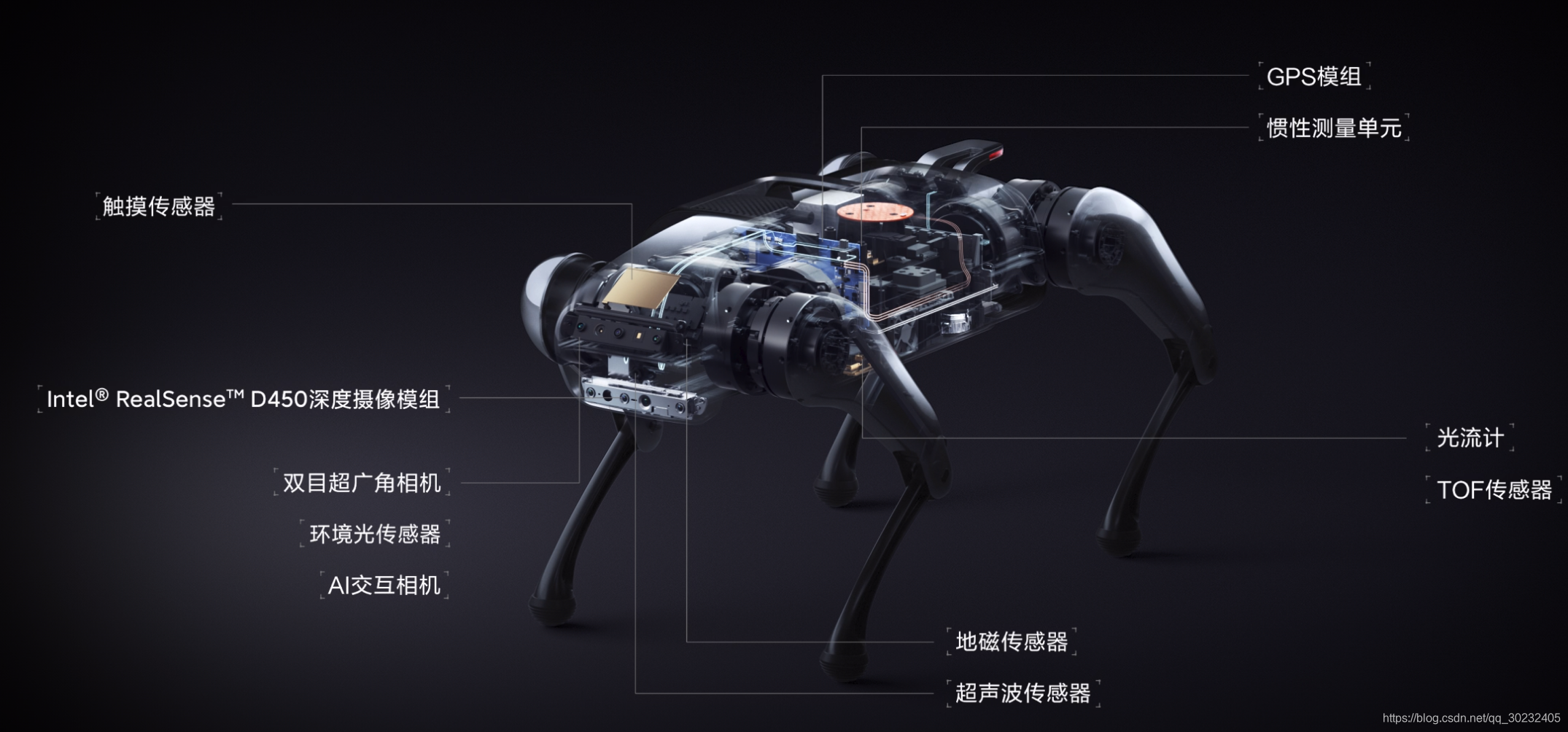
机器狗的难点在于硬件方面的控制。
- 机器狗的“心脏”:这次“铁蛋”采用了自研高性能伺服电机,让它能够适应不同复杂的地形
- 为了提升机器狗的感知能力,搭载了触摸传感器,光传感器等,同时搭载了深度摄像,超广角摄像机等
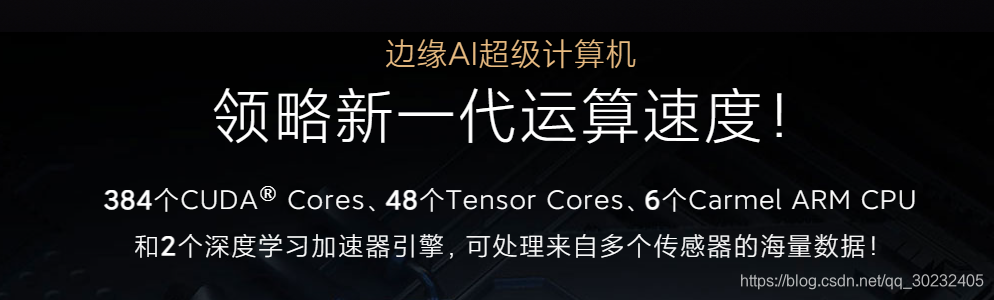
- 核心图像计算方面,采用了384个CUDA Cores,6个ARM CPU,2个深度学习加速引擎:
软硬件的成功结构,使得“铁蛋”能够做成如:奔跑、跳跑、左右转体、后空翻、握手等操作。同时辅助复杂的图像运算,使得它能够自主识别跟随、导航避障等。

有知乎网友这样评价“铁蛋”:从外观上来说,小米的这个更有“黑科技”的感觉,但机器人这个不比手机,咱不能只是摆出一堆参数来告诉观众自己多牛,软硬件如何结合发挥最大的潜力才是关键。
3.当前机器狗的发展
在国外,波士顿的机械狗Spot作为第一款商用产品早已问世:
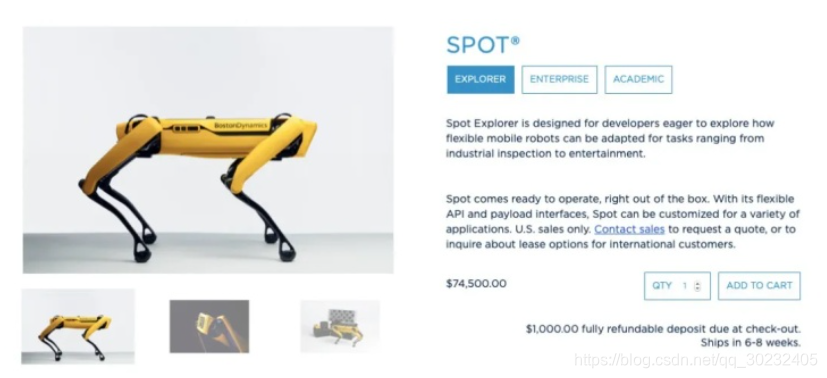
它可以通过简单的类似与“游戏手柄”的机器进行操作:

但其动则几十万的售价让普通家庭难以一睹其真面目。
国内也开始有厂商进入这个领域,比如“宇树科技机械狗A1”,售价1w:

南京蔚蓝科技阿尔法狗,售价2w6:

再到腾讯的MAX:

最后再到今天的小米机械狗,9999的价格,已经可以让很多机械狗发烧友动心了。
4.未来
未来,当机械狗进入普通家庭,它能够做什么?
最让人想到的是,让机械狗搭配语音功能,导盲功能,作为导盲电子狗提供给盲人。设想一个场景,当前方有危险时,它能够通过语音或者震动功能,提醒主人前方有危险。
又或者搭载机械臂,为人类提供更多方便快捷的服务。

相信,四足机器人能够终有一天,真正进入寻常百姓的家庭中,为人类社会做出更多的贡献。


















 2639
2639

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











