






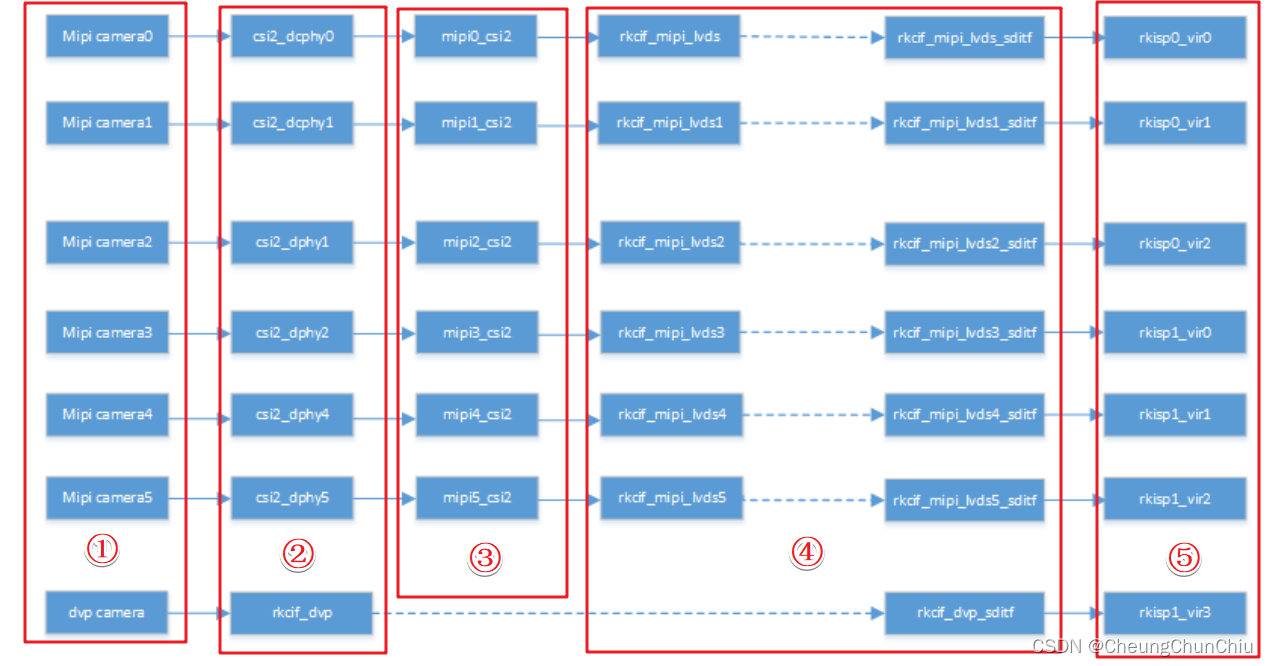
- ①:MIPI/DVP摄像头外设
- ②:数字摄像头物理层接口协议,可以理解为物理接口层,DPHY协议只定义了物理层的规范,而并没有规定具体的数据格式和编解码方案。因此,在实际应用中,还需要结合其他标准或协议,如CSI-2(Camera Serial Interface)和DPI(Display Parallel Interface),来完成完整的摄像头和显示器的数据传输方案
- ③:csi2模块,用来解析mipi协议(也就是解析来自物理层收到的高速串行数据)
- ④:vicap模块,分化成7个cif节点,rkcif_mipi_lvds~rkcif_mipi_lvds5、rkcif_dvp,用于将数据转给ISP
- ⑤:isp模块,Image Signal Processor(图像信号处理器)


















 2570
2570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









