







机器人定义
国际标准化组织(ISO)
机器人定义:
1、机器人的动作机构具有类似于人或其它生物体的某些器官(肢体、感受等)的功能
2、机器人具有通用性,工作种类多样,动作程序灵活易变;
3、机器人具有不同程度的智能性,如记忆、感知、推理、决策、学习等;
4、机器人具有独立性,完整的机器人系统在工作中可以不依赖于人的干预。
机器人定义不会统一,随时代发展会有不同变化
机器人组成
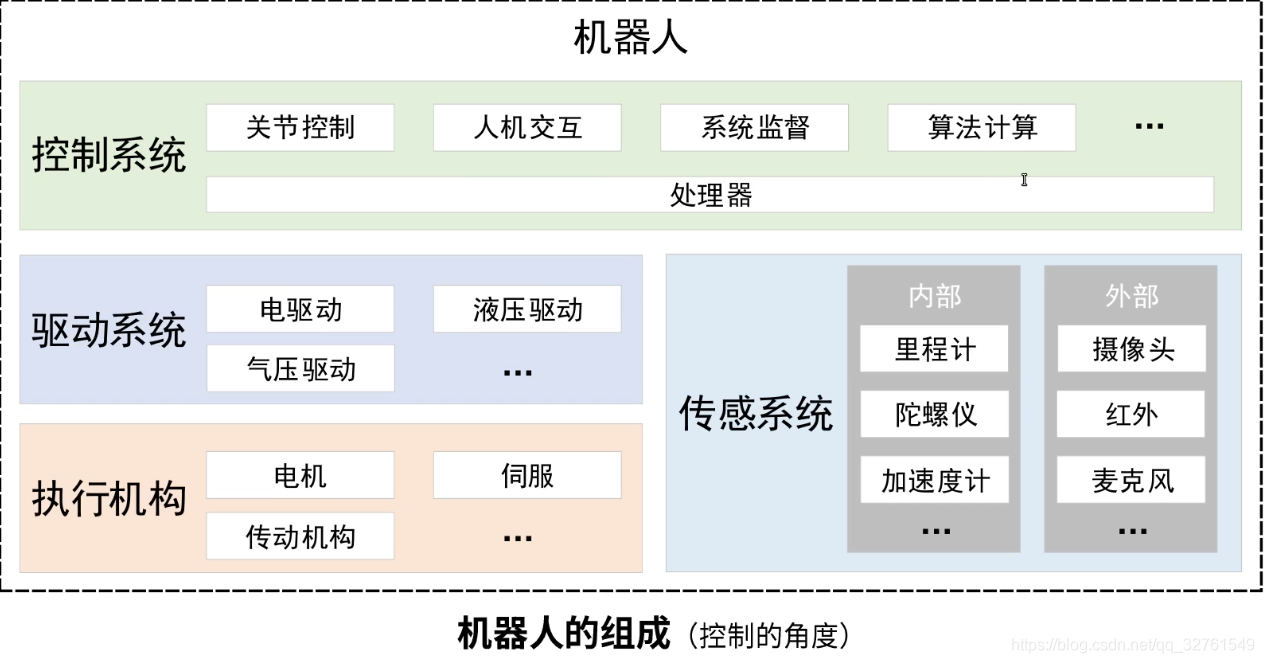
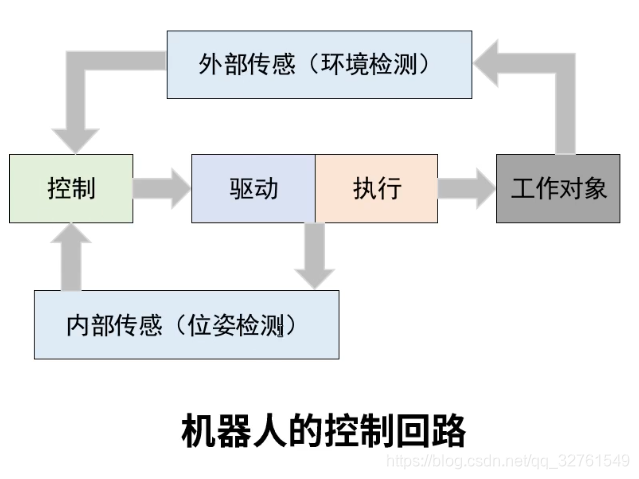
机器人系统构建
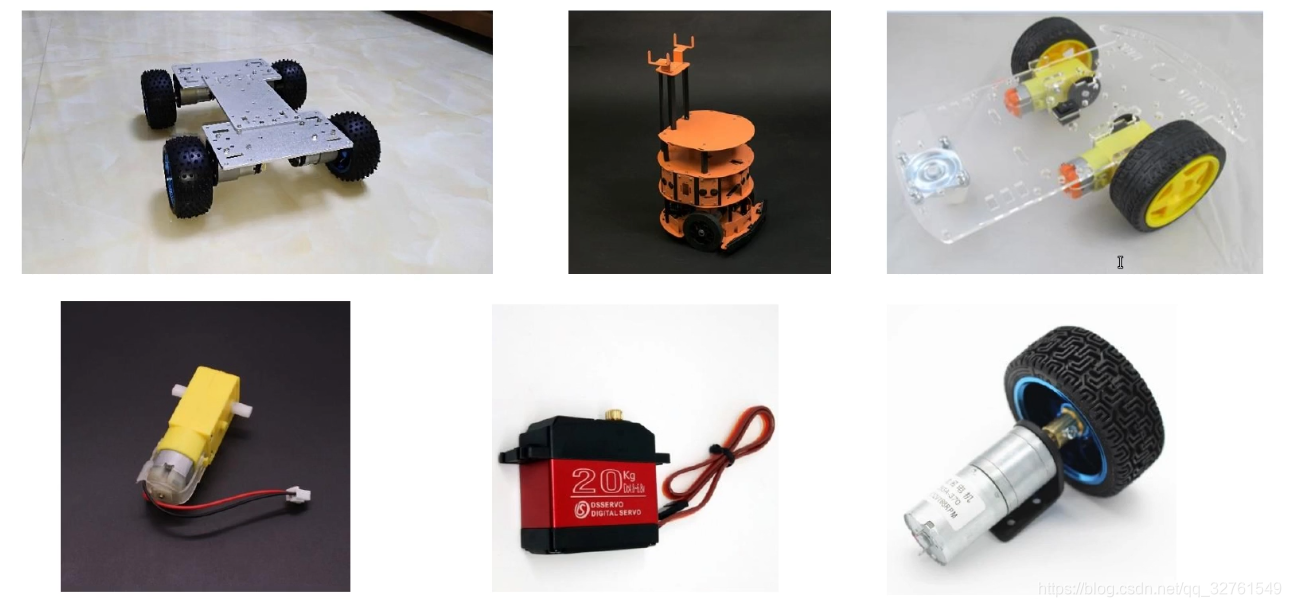
执行机构
机器人底盘
电机
舵机
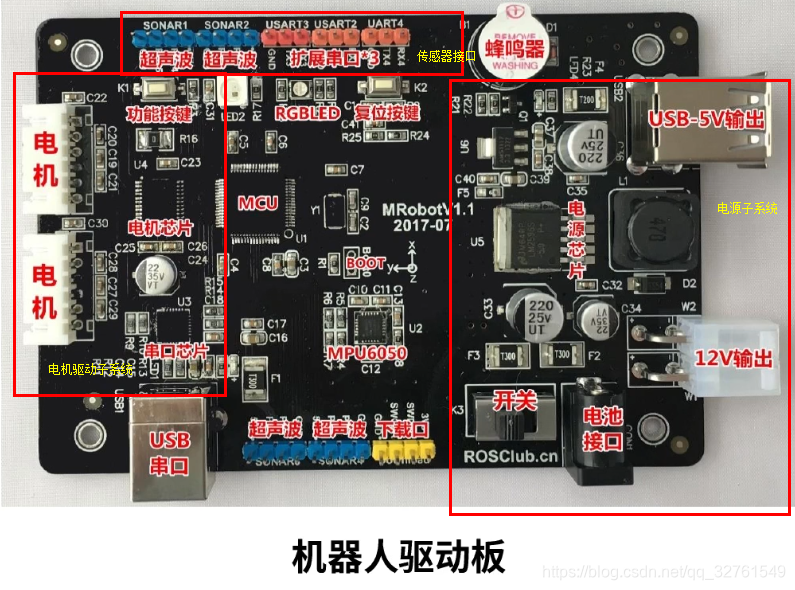
驱动系统
1、电源子系统
12V/5v/3v
电源保护、滤波
2、电子驱动子系统
电机驱动:控制信号(PWM)->电信号(12V或14V)
电机控制:闭环驱动
3、传感器接口
超声波
里程计
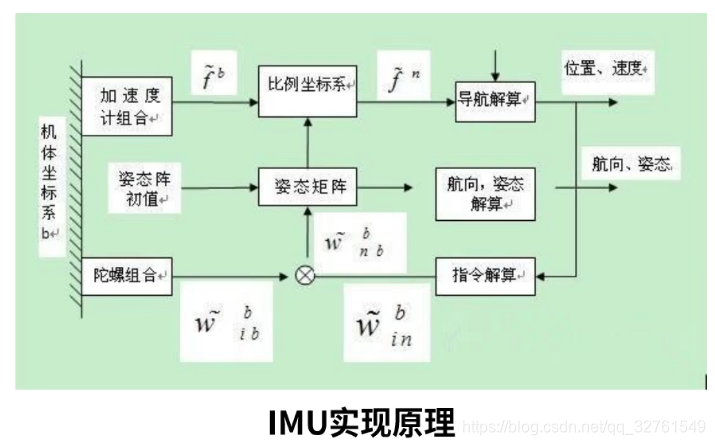
内部传感器系统
惯性测量单元(IMU)
测量物体速度姿态,主要包括三轴陀螺、三轴加速度计、磁力计等

控制系统板卡
Raspberry Pi — 运算不是很多的时候适合
Odroid-XU4 — 运算不是很多的时候适合
Nvidia Jetson TX1— 处理内容相对复杂
Mini PC — 处理内容比较复杂时
Intel NUC — 处理内容比较复杂时
外部传感器
摄像头
深度相机
gps
超声波
激光雷达
ros可以支持的传感器
常用传感器的ROS驱动:www.wiki.ros.org/Sensors
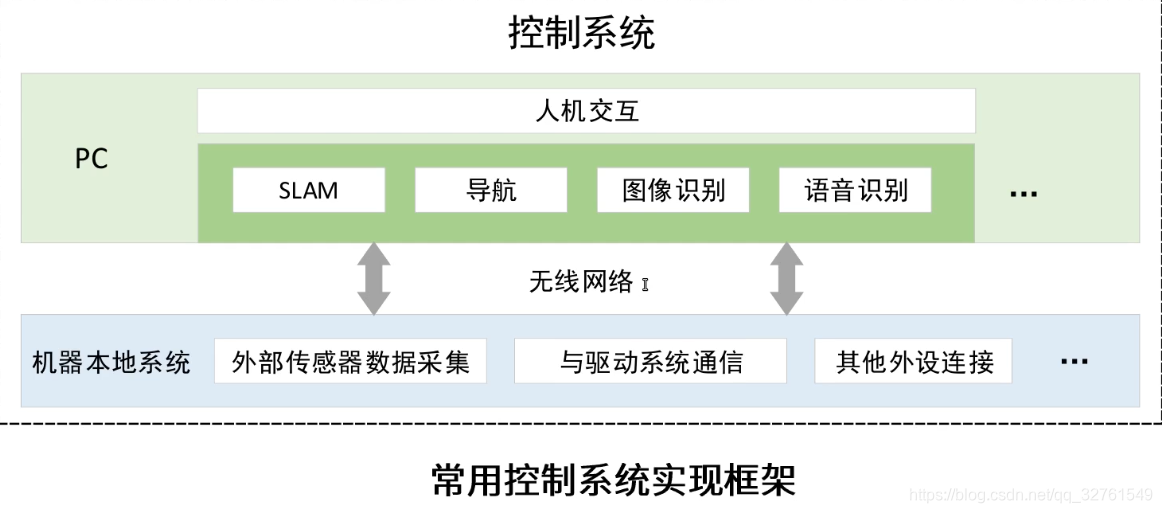
控制系统实现
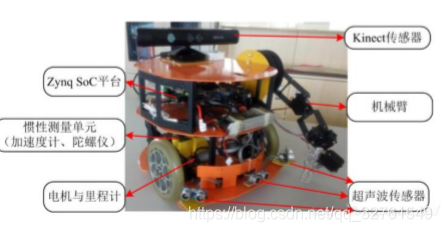
应用实例
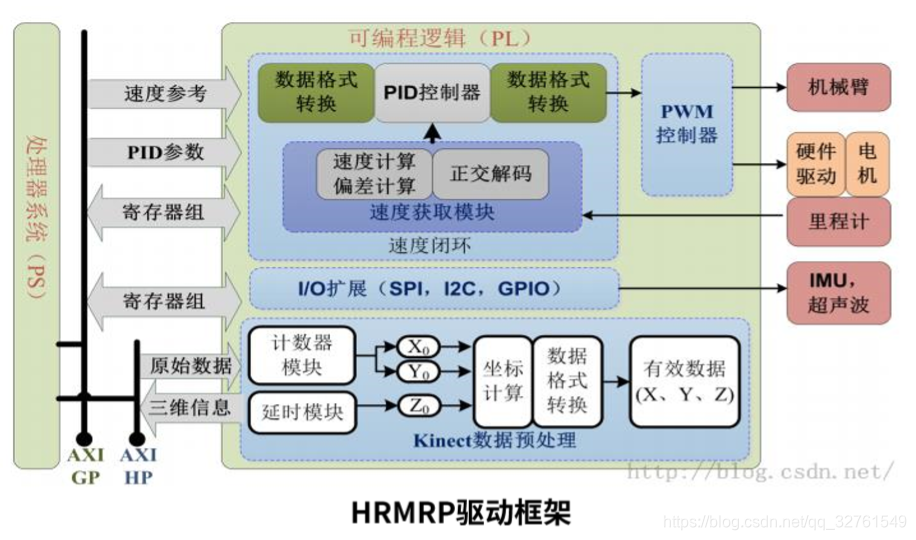
混合实时移动机器人平台
总体框架
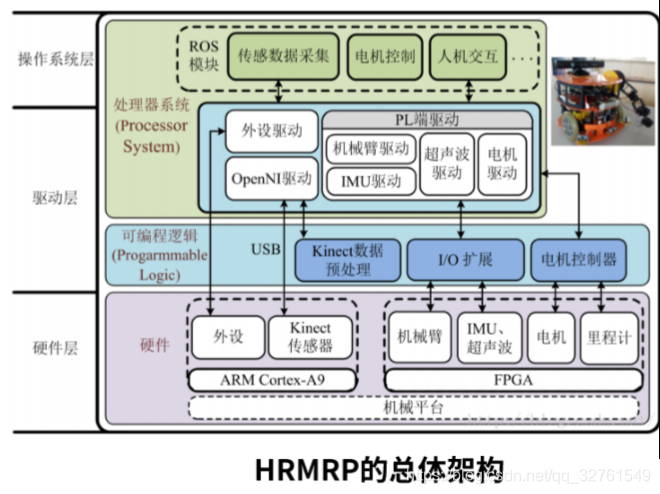
驱动框架



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











