








 超级会员免费看
超级会员免费看

 本文介绍了道格拉斯-普克算法在点云轮廓线简化中的应用。通过该算法,可以有效减少点云数据中的冗余点,从而得到简洁的轮廓线。文章详细阐述了DP算法的原理,包括从点云数据中提取边缘点,构造二叉树,遍历并确定关键节点的过程。并展示了程序的编程思想和测试验证,证明算法的有效性和实用性。
本文介绍了道格拉斯-普克算法在点云轮廓线简化中的应用。通过该算法,可以有效减少点云数据中的冗余点,从而得到简洁的轮廓线。文章详细阐述了DP算法的原理,包括从点云数据中提取边缘点,构造二叉树,遍历并确定关键节点的过程。并展示了程序的编程思想和测试验证,证明算法的有效性和实用性。
1、背景介绍
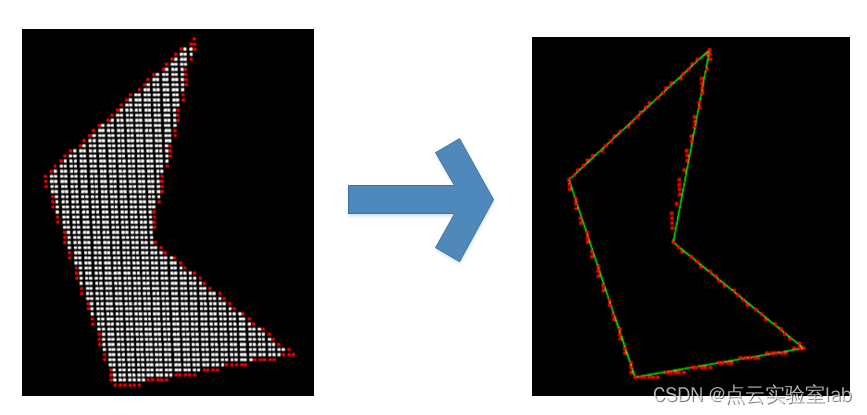
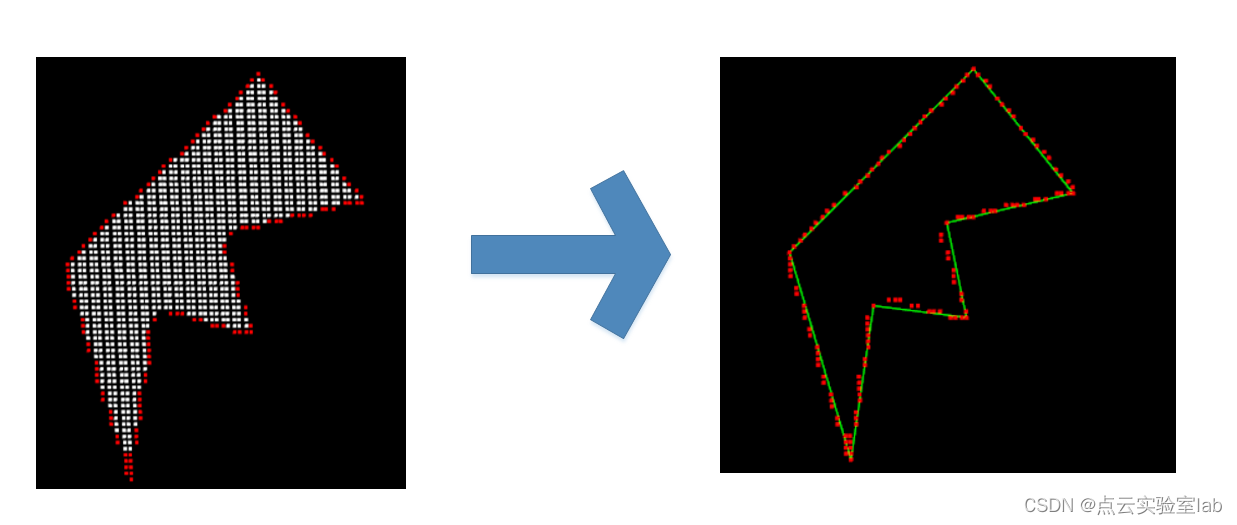
由于点云无法精确刻画目标对象边缘信息,因此常规提取的边缘点直接相连所生成的轮廓线,锯齿现象显著,与真实情况相差甚远(图b所示)。
道格拉斯-普克(Douglas-Peuker)抽稀算法是用来对大量冗余的图形数据点进行压缩以提取必要的数据点。利用DP算法实现的轮廓线简化结果,如图c,其真实反应了点云形状。因此,在实际点云三维重建中,DP算法常用于点云简化,进而用于后续三维重建。
由于点云无法精确刻画目标对象边缘信息,因此常规提取的边缘点直接相连所生成的轮廓线,锯齿现象显著,与真实情况相差甚远(图b所示)。
道格拉斯-普克(Douglas-Peuker)抽稀算法是用来对大量冗余的图形数据点进行压缩以提取必要的数据点。利用DP算法实现的轮廓线简化结果,如图c,其真实反应了点云形状。因此,在实际点云三维重建中,DP算法常用于点云简化,进而用于后续三维重建。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文



















 448
448







