







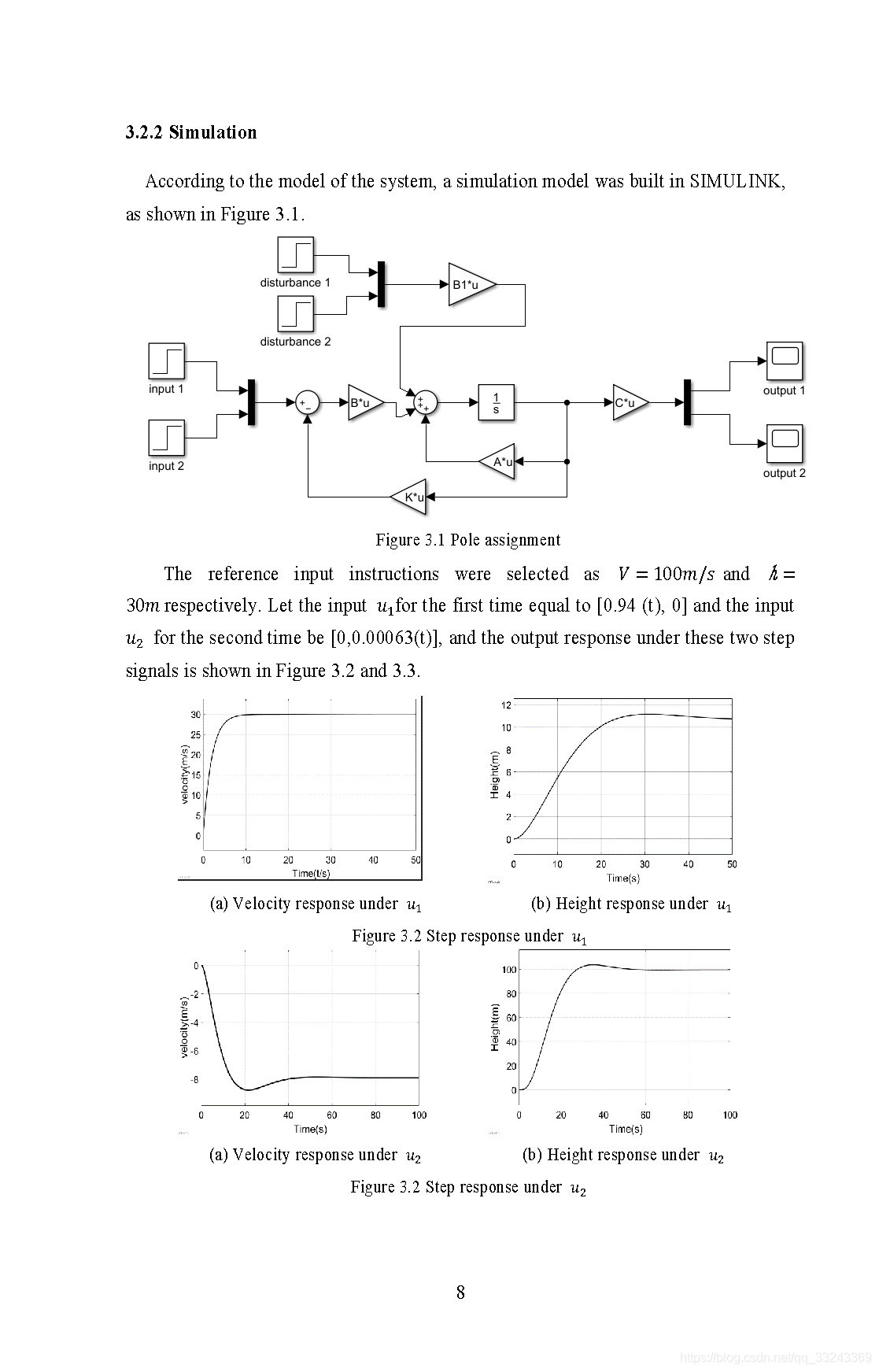
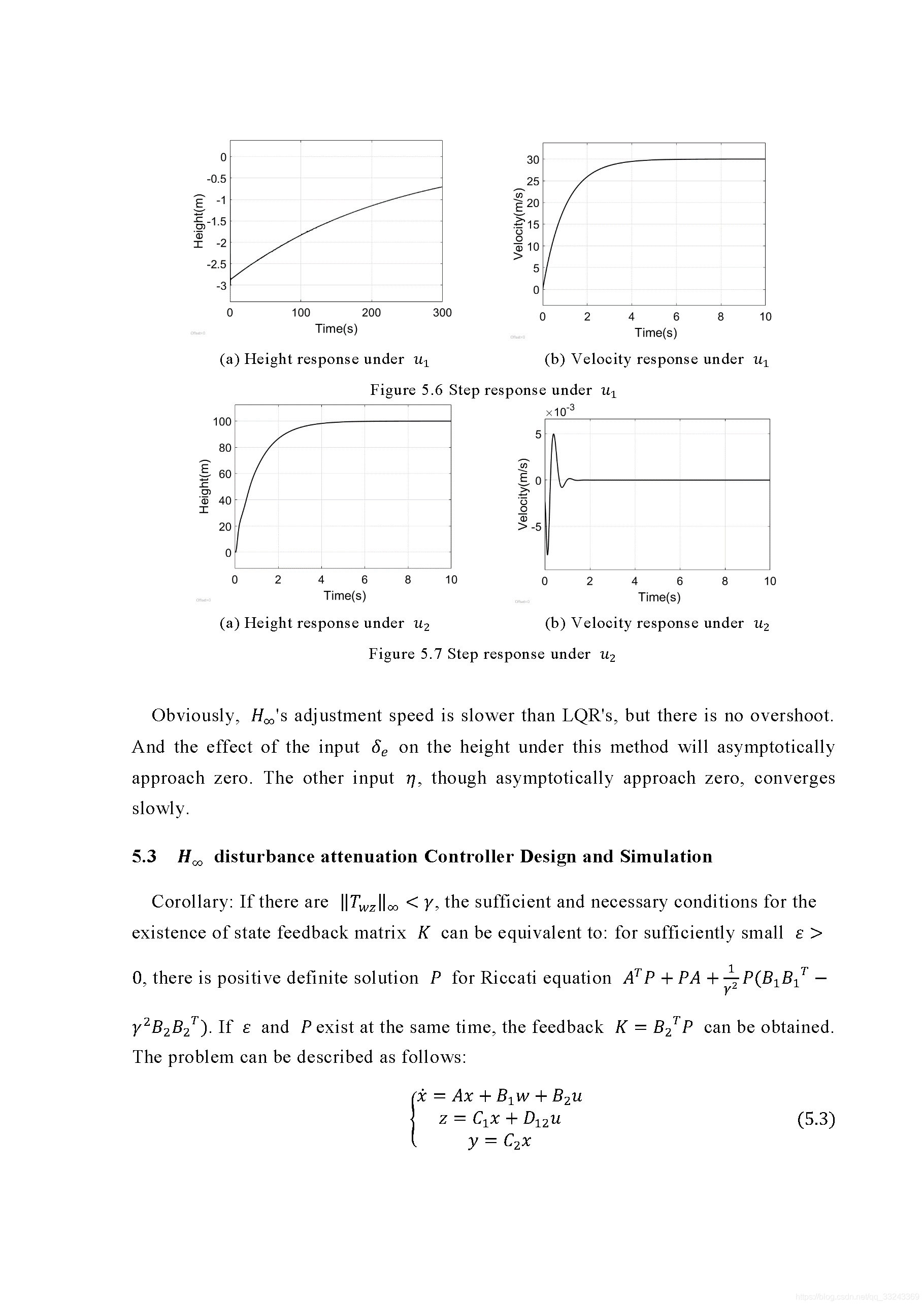
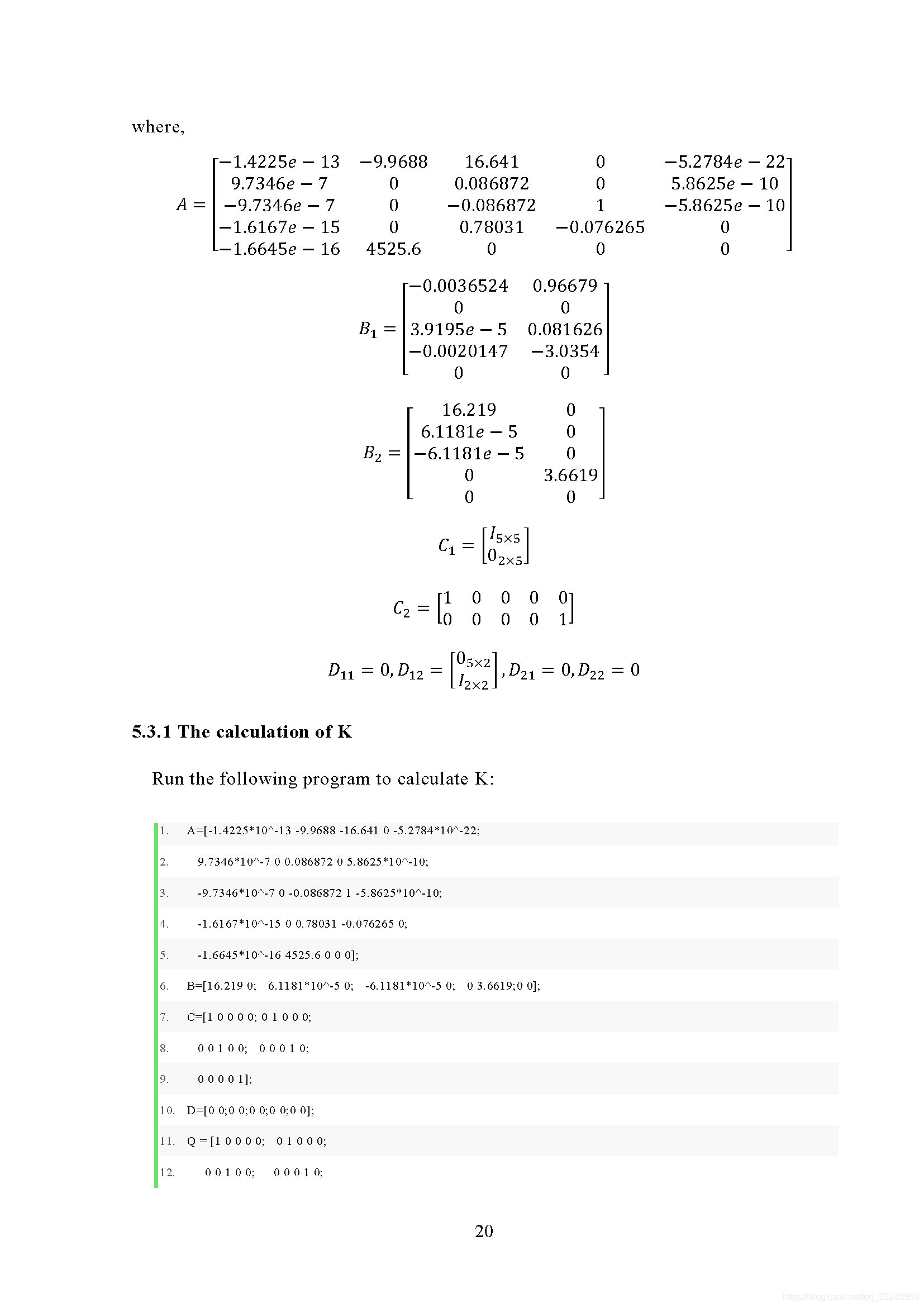
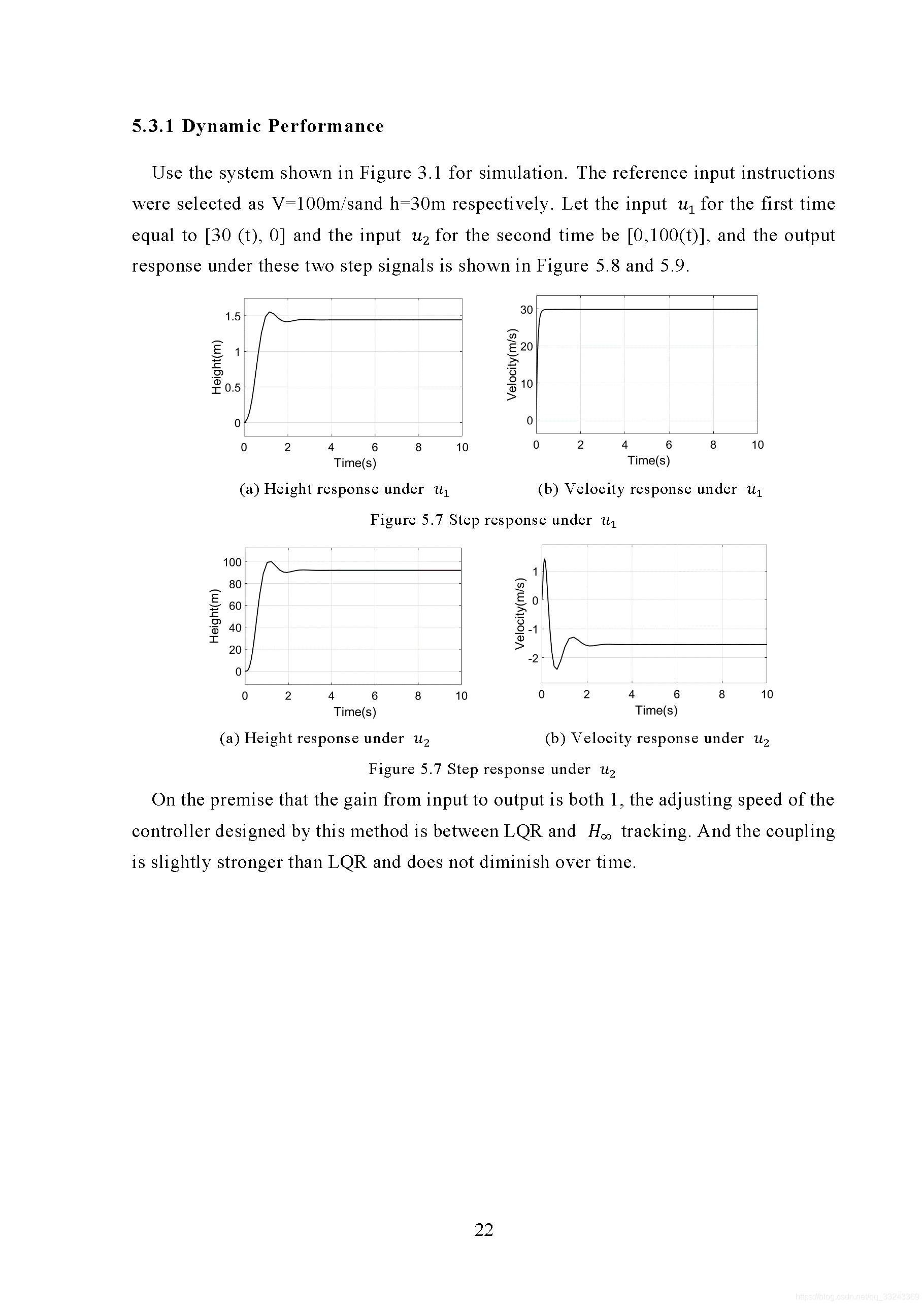
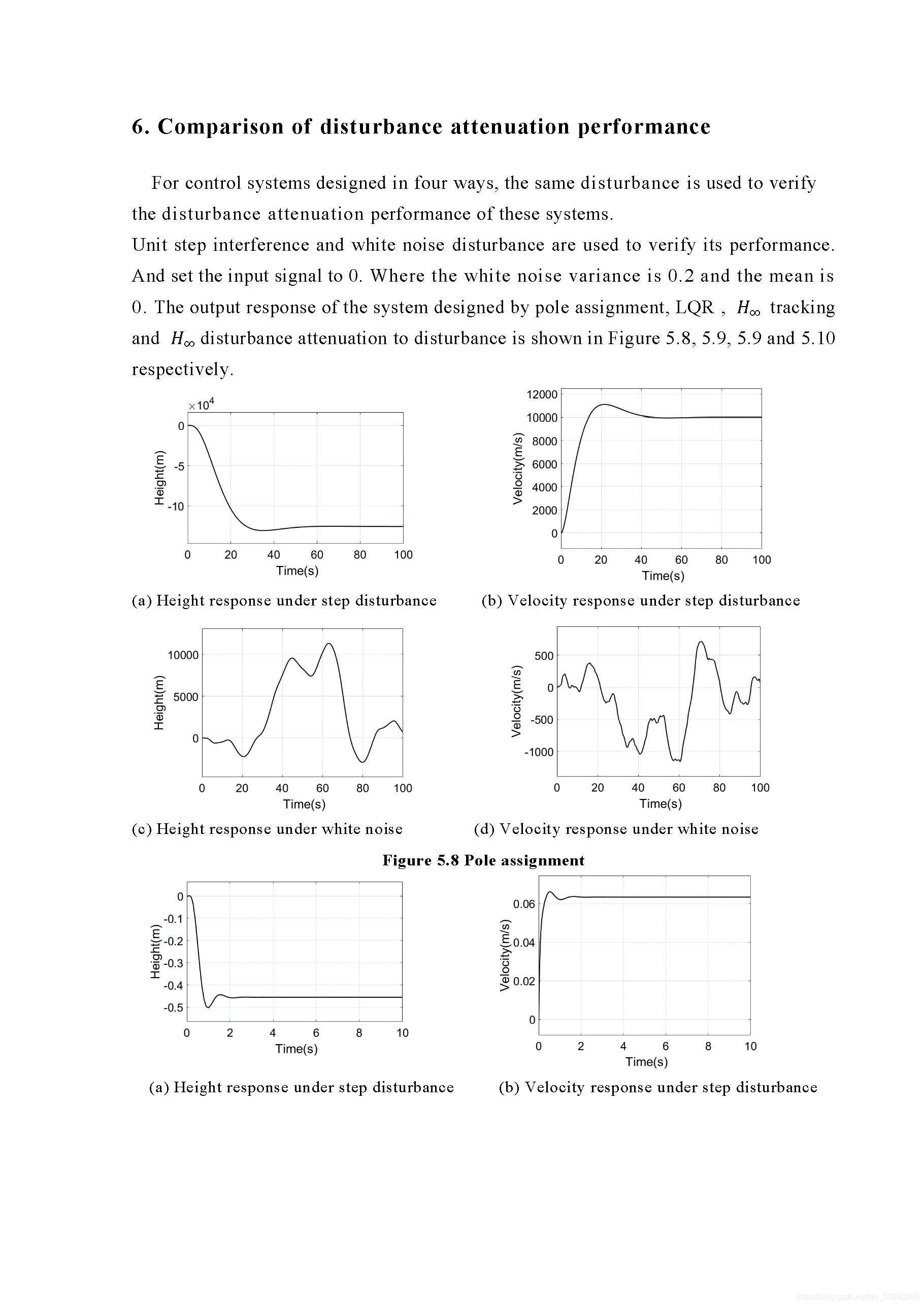
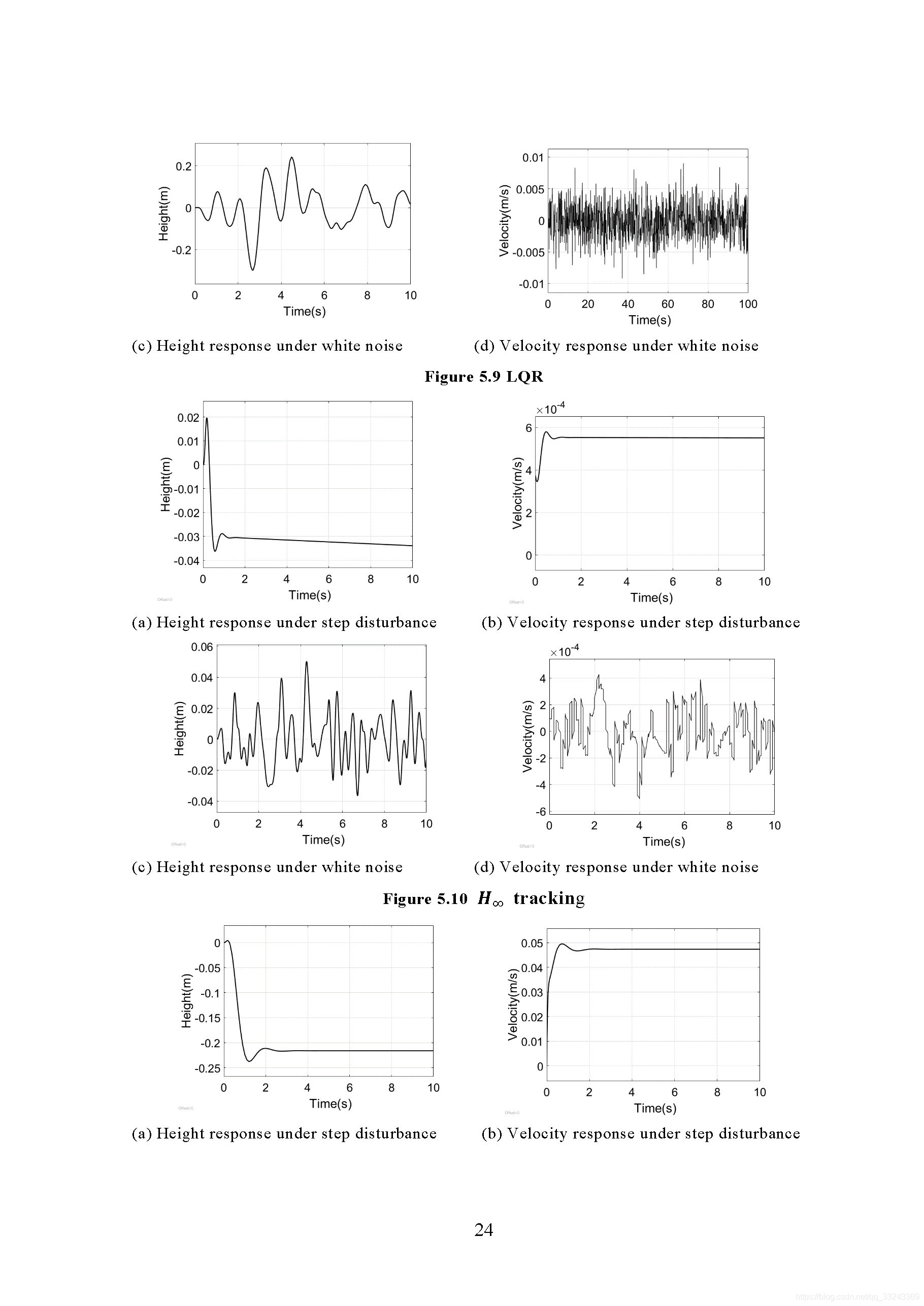
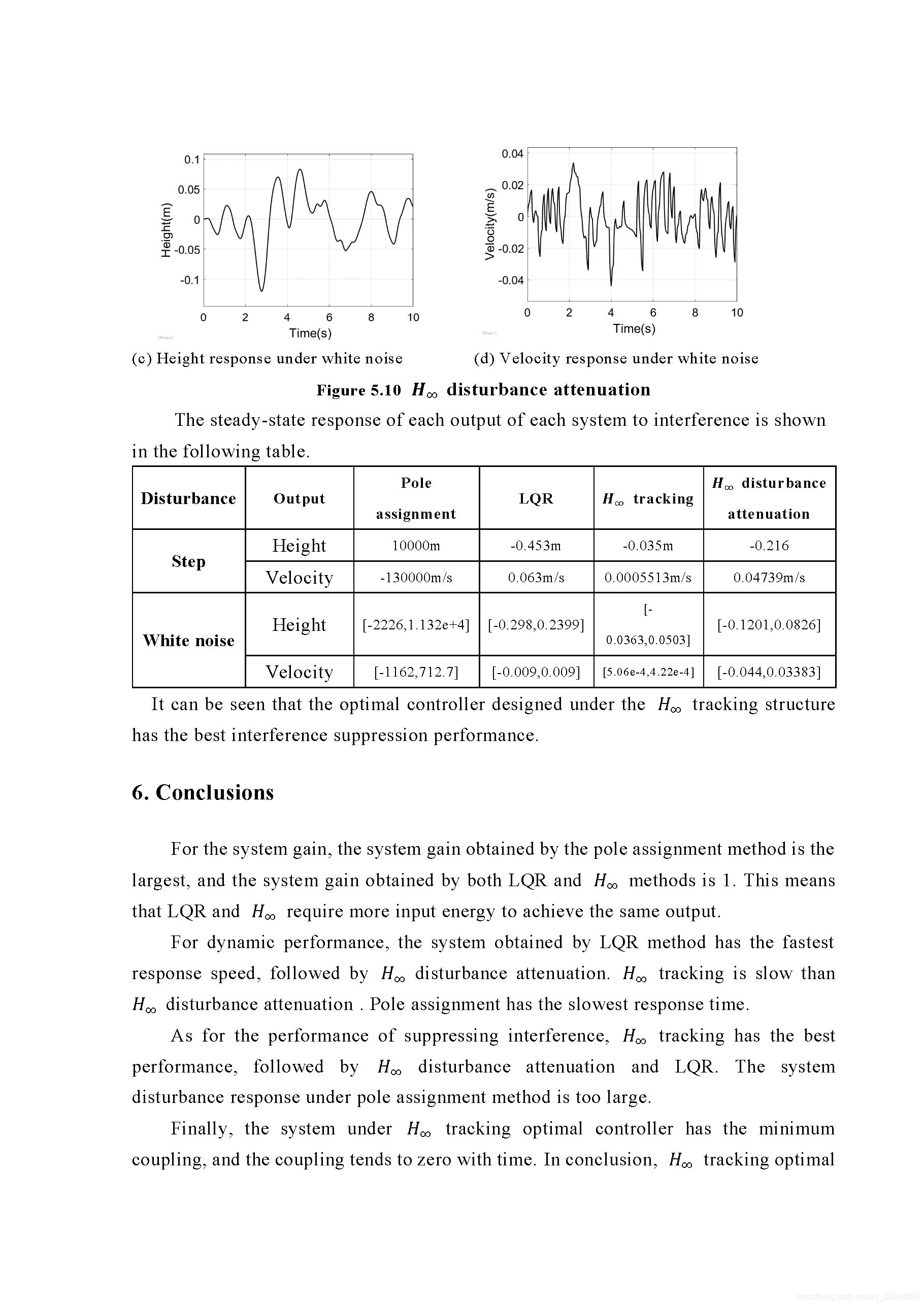
写在最前面:
本身是我的鲁棒控制课程的大作业,这篇博客里包含了四种控制器的设计方法,一是极点配置,而是LQR,三是H无穷扰动抑制,四是H无穷跟踪控制,希望可以能看到我博客的人一些参考。代码和仿真模型的度盘链接会放在博客的最下面,自取,链接挂了在评论区留言,有问题也欢迎指正(有问题评论区可以问,当然我也不一定会哈哈,还有如果这篇博客已经是个很久的博客,还是不要再问我相关的问题了,因为很久之后我应该都忘的差不多了)








代码与仿真链接:链接:https://pan.baidu.com/s/1_ZfsO7GWe6mLbqslxe5k5w
提取码:yug9
链接里包含以下文件,其中pole_place.m是极点配置法,lqr_test.m是LQR法,Robust_control是H无穷干扰抑制.这三个共用一个simulink模型,MODEL.slx
nn.m是H无穷跟踪控制,所使用的仿真模型是trackhif.slx.
先运行.m文件求解控制器,然后再运行仿真.
低版本Matlab仿真文件链接:https://pan.baidu.com/s/1qWizXL9dQhXzkhBU7mQCOw
提取码:swi9

















 788
788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









