







一、基本概念
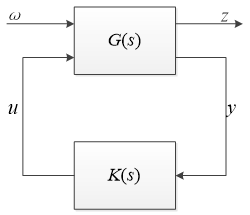
对于图1所示系统,u为控制输入,y为测量输出,z为被调输出,w为干扰输入,由输入u,w到输出y,z的传递函数G成为增广被控对象,控制器为k。
二、H无穷控制器设计方法
1. 基于Riccati方程的H∞控制设计
2.基于LMI的H∞控制
三、设计实例——一级倒立摆
%基于LMI算法的倒立摆状态反馈H∞控制器设计
%State Feedback H∞ controller design based lmi approach
%by 2013/04/03 hemmingway <hemmingway@163.com>
clc
clear all
%----------------------------------------------%
%定义常数矩阵
A=[0 1 0 0;
0 -0.0883 0.6293 0;
0 0 0 1;
0 -0.2357 27.8285 0] ;
B1=[0 2.3566 0 104.2027]';
B2=[0 0.8832 0 2.3566]';
C1=[0.064 0 0 0;
0 1e-3 0 0;
0 0 0.11 0;
0 0 0 0.01;
0 0 0 0];
D12=[0 0 0 0 0.01]';
D11=[0 0 0 0 0]';
C2=[1 0 0 0;
0 0 1 0];
D21=[0 0 0 0]';
D22=[0 0 0 0]';
%
setlmis([]); %建立一个LMI
X=lmivar(1,[4,1]); %定义矩阵变量
W=lmivar(2,[1,4]);
r1=lmivar(1,[1,1]);
%%%%%%%
lmiterm([1 1 1 X],A,1,'s');
lmiterm([1 1 1 W],B2,1,'s');
lmiterm([1 2 1 0],B1');
lmiterm([1 2 2 0],-1);
lmiterm([1 3 1 X],C1,1);
lmiterm([1 3 1 W],D12,1);
lmiterm([1 3 2 0],D11);
lmiterm([1 3 3 r1],-1,1);
%
lmiterm([-2 1 1 X],1,1);
lmisys=getlmis;
%%----------------------------solver---------------------------------------
n = decnbr(lmisys);
c = zeros(n,1);
for j=1:n
[r1j]=defcx(lmisys,j,r1);
c(j)=trace(r1j);
end
%c=mat2dec(lmisys,zeros(4,4),zeros(1,4),eye(1))
[copt,xopt]=mincx(lmisys,c, [0 0 0 0 0]);
X=dec2mat(lmisys,xopt,X)
W=dec2mat(lmisys,xopt,W)
K=W*X^(-1);
K=K/100 %%控制器,为什么要除以100? 因为D12矩阵哪里是0.001,不是传统的1
r1=dec2mat(lmisys,xopt,r1);
gammar=r1^(1/2) %%gammar
%----------------------------------simu------------------------------------
%
w=0.0;
n=1;
Dt=0.01;
t=-0.8;
t0=t;
x=[-0.2 0 0.3 0]';
for i=1:1500
if t<0
%t1=4*pi*t;
t1=4*pi*t;
x=[1.1*sin(t1); 1.2*cos(t1); 0.5*sin(t1)+1.0*cos(t1); 0];
else
u=K*x; %%反馈控制
Dx=A*x+B1*w+B2*u;
x=x+Dx*Dt;
end
Y(:,n)=x;
t=t+Dt;
n=n+1;
end
figure(1)
time = (1:n-1)*Dt+t0;
xpos=Y(1,:);
xangle=Y(3,:);
subplot(2,1,1)
plot((1:n-1)*Dt+t0,xpos,'k')
axis([-0.8 10 -1.5 1.5])
grid on
xlabel('time(s)')
ylabel('Cart positon')
subplot(2,1,2)
plot((1:n-1)*Dt+t0,xangle,'k')
axis([-0.8 10 -1.5 1.5])
grid on
xlabel('time(s)')
ylabel('Pendulum')
mincx
| 可以查看defcx命令的帮助,这个命令就是辅助mincx命令的,功能是定义求解最优的cost function。 如你给的例子,可以由以下代码定义“c“: -------------------------------------------------------------------------------------------- n=decnbr(lmisys); % lmisys 为矩阵不等式系统的名称 c=zeros(1,n); % 为变量c 预设存储空间 for i=1:n [Mi]=defcx(lmisys,i,M); c(i)=trace(Mi); end % 循环命令设置代价函数 c^T x 中的系数 c [copt,xopt]=mincx(lmisys,c,options); --------------------------------------------------------------------------------------------- 感觉附图中的问题像是用锥补线性化算法(Cone Complement Linear)求解含有互逆矩阵M和X的矩阵不等式问题。如果是的话,附图中的定理就不对了,锥补算法是通过最小化”trace(MX)“及约束(ii)来保证M和X互逆的。 |


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











