






一、问题的提出
LQG控制系统具有一定的相对稳定性,但LQG控制系统甚至LQ最优调节器对被控对象的模型摄动(模型误差)的鲁棒稳定性在某些场合很差。根据LQ最优调节器的性质,状态反馈闭环系统具有大0.5的稳定幅值裕度,大于等于±60°的相角稳定裕度。H无穷控制
1、 在以下两种情况下,控制系统的设计如果采用传统的H2性能指标,在某些场合不能满足实际的需要:
①、如果被控对象不是由一个确定的模型来描述的,而仅知道其模型属于某个己知的模型集合;
②、外部信号(包括干扰信号、传感器噪声和指令信号等)不是具有已知特性(如统计特性或能量谱)的信号也仅知道其属于某个已知的信号集合。
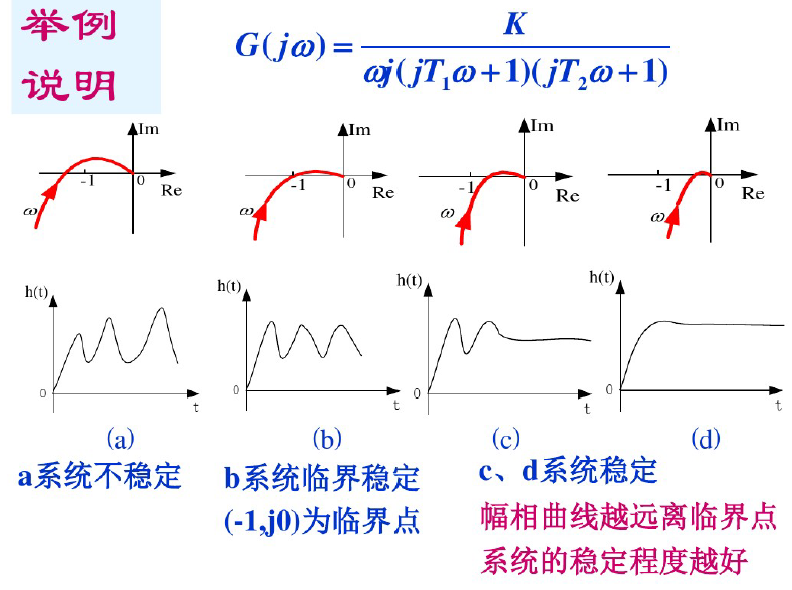
2、频域稳定裕度(量)一一相对稳定性
控制系统正常工作的首要条件是系统稳定,同时还必须满足一定的相对稳定性要求,相对稳定性反映出系统稳定程度的好坏。闭环控制系统相对稳定性(时域中,超调量σ%,根与虚轴距离)可以通过开环频率特性加以描述。奈氏(幅相)曲线与临界点(-1,0)的靠近程度,可以用来度量稳定裕度在实际工程系统(控制、电子、通信系统)中常用相角(位)裕度(量)γ和幅值裕度(量)h表示。
一般来说,相角裕度和幅值裕度概念只适用于最小相位控制系统(但可含滞后环节)。
3、最小相位控制系统(minimum phase systems)
①如果控制系统开环传函的所有极点和零点均位于s左半平面上,则称该系统为最小相位系统
②一个系统被称为最小相位系统,当且仅当这个系统是因果稳定(输出仅与当前或之前的输入有关,先有因,后有果)的,有一个有理形式的系统函数并且存在着一个因果稳定的逆函数。
③特点:如果两个系统有相同的幅频特性,那么对于大于零的任何频率,最小相位系统的相角总小于非最小相位系统;最小相位系统的幅频特性和相频特性直接关联,也就是说,一个幅频特性只能有一个相频特性与之对应,一个相频特性只能有一个幅频特性与之对应。对于最小相位系统,只要根据对数幅频曲线就能写出系统的传递函数
④、相角裕度又称相位裕度
对于闭环稳定系统,如果开环相频特性再滞后度,则系统将由稳定变为临界稳定。为了使最小相位系统稳定,相角裕度必须为正。在对数坐标图上的临界稳定点为0dB和-180度。
⑤、相角裕度又称相位裕度( Phase Margin)γ
对于闭环稳定系统,如果系统开环幅频特性再增大h倍,则系统将变为临界稳定状态。h值越大,保证系统稳定工作的前提下,允许开环增益值变化越大。




二、H_inf控制理论发展
1、1981年, Lamest提出以控制系统的某些信号间的传递函数(矩阵)的H∞范数作为优化性能指标的设计思想
2、1982年, Doyle针对H∞性能指标发展了“结构奇异值”来检验鲁棒性,极大程度地促进了以∞范数为性能指标的控制理论的发展
3、Youla等人提出的控制器参数化,使 Zamesp的Hx性能指标以及Doylel的结构奇异值理论揭开了反馈控制理论的新篇章
4、H∞控制理论蓬勃发展:从频域到时域、定常系统到时变系统、线性系统到非线性系统、连续系统到离散系统、确定性系统到不确定系统、无时滞系统到时滞系统、单目标控制到多目标控制
5、目前线性系统的Hx控制理论已经基本成熟,形成了一套完整的频域设计理论和方法,而时域状态空间的 Riccati方法和LMI方法,由于具有能揭示系统的内部结构、易于计算机辅助设计等优点而倍受重视
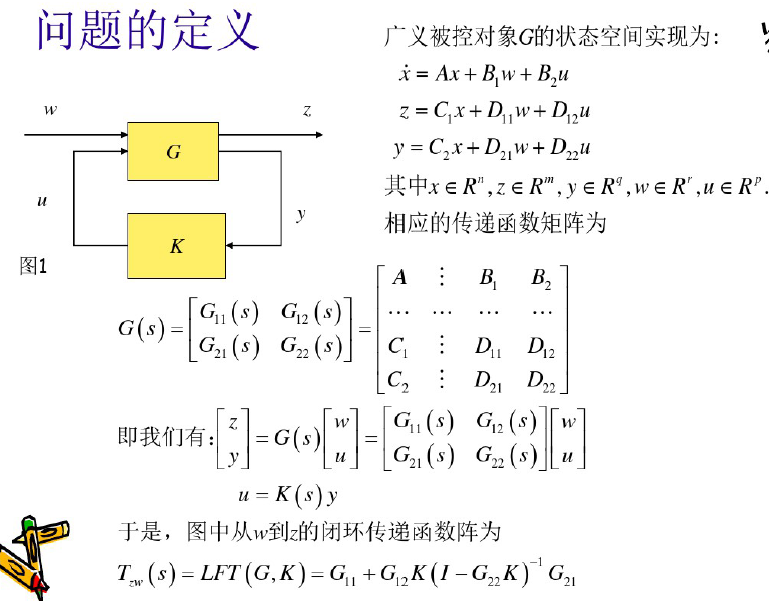
三、H∞标准控制问题
工程实际中,许多控制问题可归结为H∞标准控制问题:干扰抑制问题;跟踪问题;鲁棒稳定问题
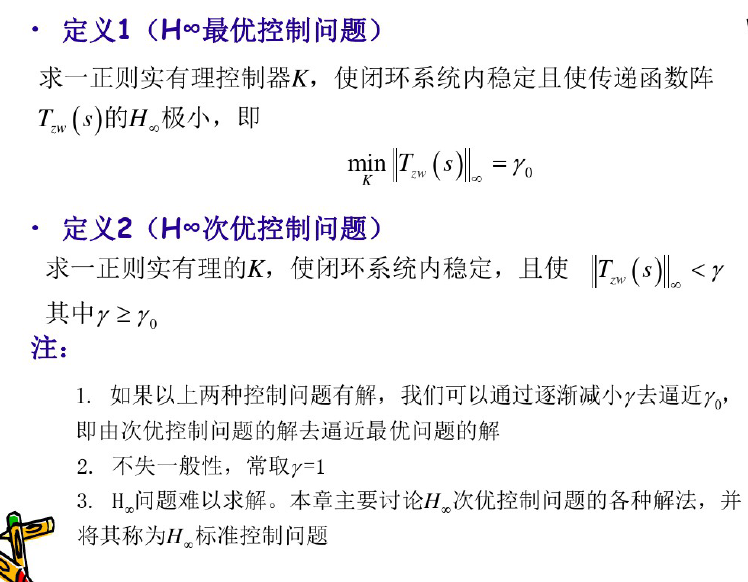
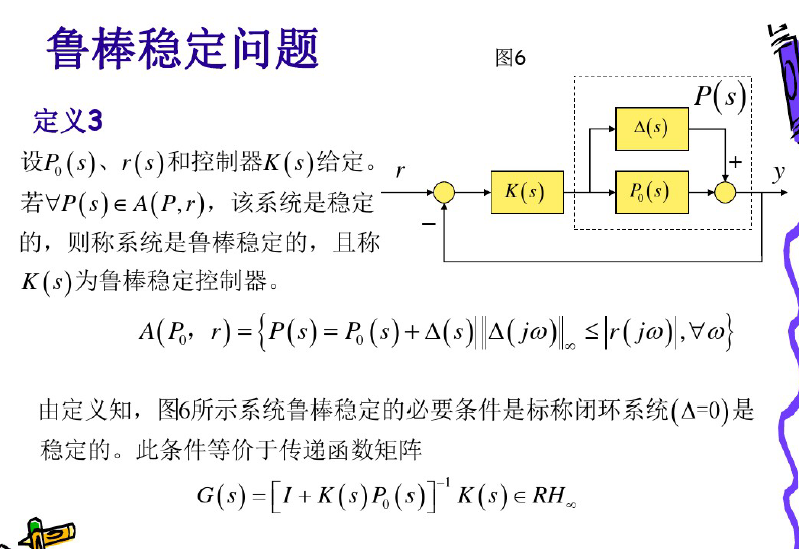
1、定义
①H2范数与H∞范数
确定信号,从 power 来说,H-inf 对应的是所有可能输入中最大的那个 power 放大系数,H2 对应的是 power spectrum 处处相等的信号的 power 放大系数。
类似的,从 energy 来说,H-inf 对应的是所有可能输入中最大的那个 energy 放大系数,H2 对应的是 energy spectrum 处处相等的信号,impulse 信号,的 energy 放大系数。
随机信号,从 variance 来说,H-inf 对应的是所有可能输入中最大的那个 variance 放大系数,H2 对应的是白噪声的信号的 variance 放大系数。
如果再回到最一开始,那 H-inf 对应的是所有频率正弦信号输入中最大的那个幅值放大系数,H2 对应的则是所有频率正弦信号输入中幅值放大系数的平方平均,即包含所有正弦分量且它们幅值相等的输入信号的幅值放大系数。②向量范数与矩阵范数向量的2-范数:每个元素的平方和再开平方根;向量的无穷范数:向量的所有元素的绝对值中最大的矩阵的2-范数(谱模):矩阵ATA最大特征值开平方矩阵的无穷范数(行模):矩阵的每一行上的元素绝对值先求和,再从中取个最大的。2.1干扰抑制问题

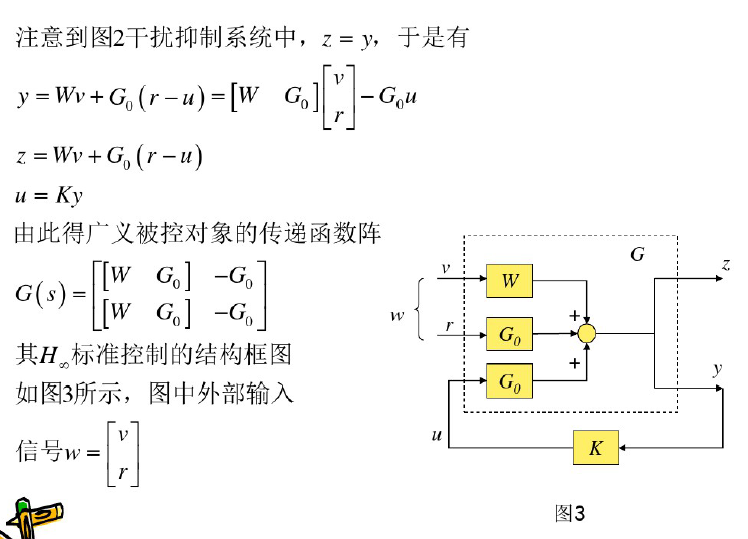
2.2 跟踪问题



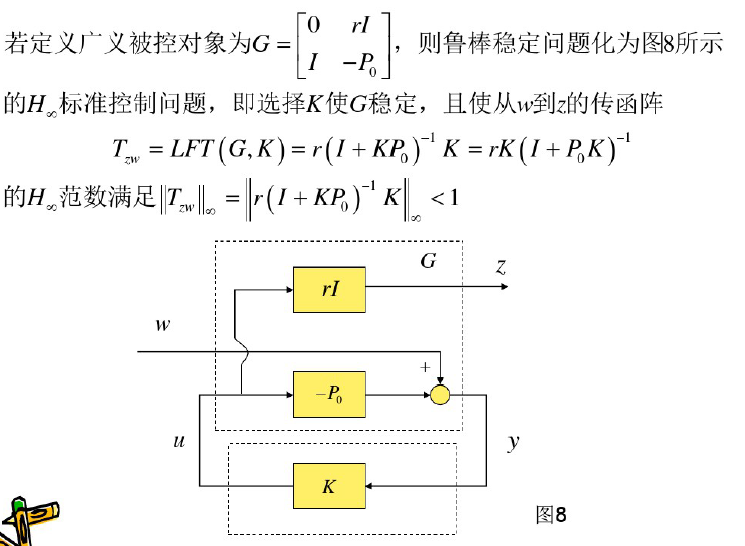
2.3 鲁棒稳定问题
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









