







前言
我们在上位机开发领域经常需要使用九点标定,网上很多教程都是直接介绍九点标定的使用,但是没有说明为啥使用九点标定,他的理论基础是什么,本文就是详细介绍九点标定的来龙去脉,正所谓知其然知其所以然方能百战百胜。
1、坐标系理论
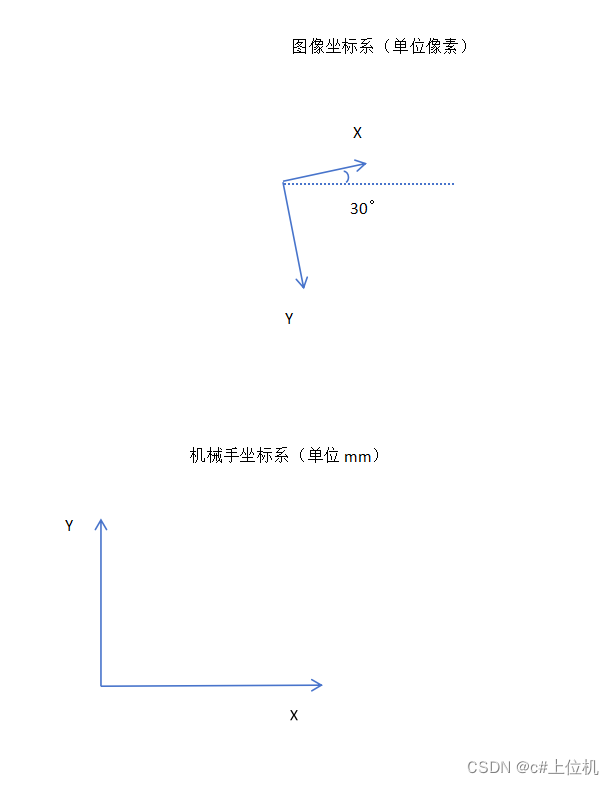
九点标定中涉及到坐标系有两个,一个是图像坐标系,也就是目标在相机中的坐标,单位是像素;另一个坐标系是目标在机械手中坐标系,单位是mm。九点标定最终得出的就是一个转换关系,也称为仿射变换矩阵,这个矩阵的作用就是根据目标在像素坐标系中的坐标,通过仿射变换矩阵直接得到目标在机械手坐标系中的坐标。假设一个目标在图像中的坐标为(10,10),那么如何才能转变为在机械手中的坐标呢,其实要经过下面三个步骤:
在详细介绍下面三个步骤之前我们可以想象一下,图像坐标系中任意一个点距离机械手坐标系原点的距离是不是等于=图像坐标系原点和机械手坐标系原点之间的距离+这个点在图像坐标系中的坐标*缩放比例,这里要乘以缩放比例的原因是因为图像坐标系的单位是像素,机械手坐标系的单位是mm,不同单位的坐标系不能直接相加,要转换为相同单位才可以,根据这个理论下面详细介绍。
第1步、将图像坐标系的点进行旋转
这里以顺时针旋转30°为例子,最终得到的图像坐标系要和机械手坐标系的x、y方向平行(方向可以不相同),这里是图像坐标系的X和机械手坐标系的X方向一致,图像坐标系的Y和机械手坐标系的Y相反。
<

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











