







前言:
大家好,我是上位机马工,硕士毕业4年年入40万,目前在一家自动化公司担任软件经理,从事C#上位机软件开发8年以上!我们在开发C#的运动控制程序的时候,一个必要的步骤就是对伺服上使能,下面进行详细介绍如何实现这一需求!
1、伺服使能的作用
伺服使能以后伺服电机处于启动状态,我们这时候使用运动控制卡的控制轴运动的指令就可以控制轴的运动;如果此时伺服电机没有处于使能状态,我们使用运动控制卡发送控制轴的运动,轴是不运动的
2、如何判断已经处于伺服使能状态
当伺服使能以后,我们使用手转动伺服电机的轴,会发现转不动伺服电机,你转动了多少角度,伺服电机会调整到初始位置;相反,如果伺服没有使能,伺服电机处于不工作状态,你想转动多少角度就转动多少角度。
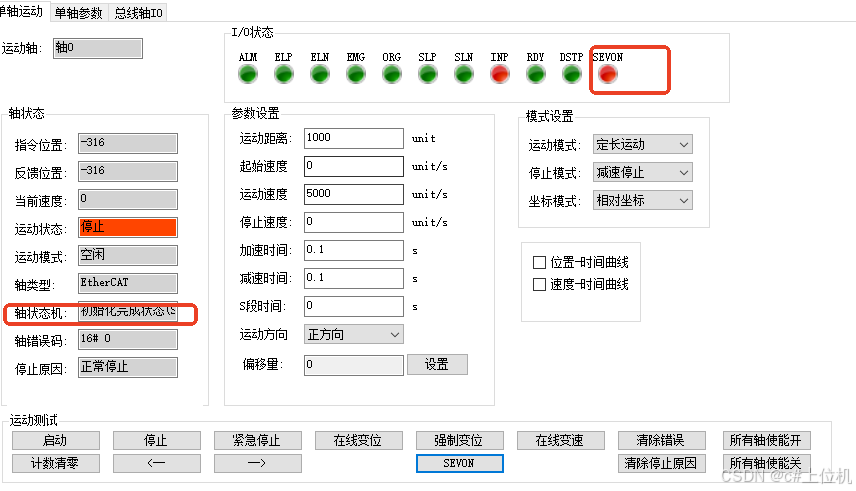
对于雷赛运动控制卡中,可以通过雷赛自带的软件的"SEVON"指示灯为绿色来判断该轴是否已经成功使能,并且“轴状态机”显示为“”伺服上电使能状态,轴不使能的状态下该指示灯为红色。
1)轴已经使能

2)轴没有使能
3、如何使用雷赛控制卡去控制伺服使能
public static extern short dmc_set_sevon_enable(UInt16 CardNo, UInt16 axis, UInt16 on_off);
对于雷赛运动控制卡而言,控制伺服使能是控制每个轴的伺服是否使能,从上面的函数可以看出想控制某个轴的伺服是否使能需要传递三个参数,
1)卡索引
由于每一张运动控制卡对于编程来说都有一个独立的索引,如果只安装了一张卡,那么卡的索引就是0;
2)轴索引
运动控制卡一般有4轴或者8轴等,并且每个轴都有一个索引,假设4轴的卡,那么轴的索引就是0、1、2、3。
3)伺服使能状态
如果想要伺服使能则传入1、如果断掉使能则传入0。
所以如果是想要让轴1的伺服使能,则卡索引为0,轴索引为1,伺服使能值为1.
注意事项
1、控制伺服使能必须在成功打开控制卡以后进行。
马工撰写的年入30万+C#上位机项目实战必备教程(点击下方链接即可访问文章目录)
1、《C#串口通信从入门到精通》
2、《C#与PLC通信从入门到精通 》
3、《C# Modbus通信从入门到精通》
4、《C#Socket通信从入门到精通 》
5、《C# MES通信从入门到精通》
6、《winform控件从入门到精通》
7、《C#操作MySql数据库从入门到精通》


















 408
408

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











