







文章目录
这一次给大家介绍一个攻击,是NVIDIA的一个工作,最近被CVPR2021所收取。
“See through Gradients: Image Batch Recovery via GradInversion”
之所以介绍这个工作,是因为这个攻击通过梯度对于其他人的训练数据进行还原,效果也十分不错。
先前的攻击大多是成员推断攻击(membership inference), 大家使用差分隐私(DP,Differential Privacy)来进行数据的保护。成员推断攻击的目的是推断一个数据是否被用于模型的训练,但是一般来说大家会假设攻击者手上有一堆数据,既包括训练数据的一部分,也包括一些额外的数据。这个假设还是比较强的,在实际上,攻击者可能根本拿不到训练数据的一部分。
仍然缺少一个比较强的攻击,而这次的工作通过梯度对训练数据进行逆向,结果还十分不错,相当值得分享给大家!
关于联邦学习
首先需要先介绍一下联邦学习,如下图所示:
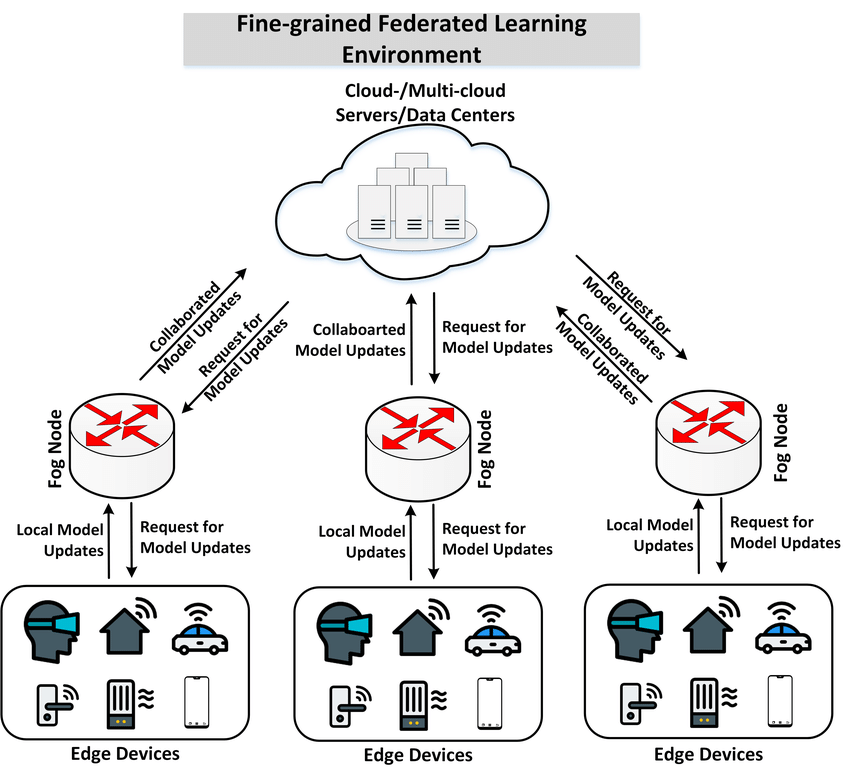
会有许多参与者一同参与训练过程,每一个参与者拥有自己的数据,并且在本地进行训练,本地训练完之后会上传模型参数,由一个中心节点对进行模型的聚合,然后再下发到每一个参与者本地进行模型的同步。
联邦学习的优势在于,每一个节点的数据都保持在本地,保证了数据隐私,实现了异构数据的访问(也就是每一个参与者自己解决数据的访问问题,即便数据是异构的不会影响整体)。
但是,参与者仍然要将模型上传,这会不会造成数据隐私泄漏呢?
基于梯度的数据还原
首先,我们先给出目标的形式化:
x
∗
=
arg
min
x
^
L
g
r
a
d
(
x
^
;
W
,
Δ
W
)
+
R
a
u
x
(
x
^
)
x^* = \arg \min_{\hat{x}} \mathcal{L}_{grad}(\hat{x};W, \Delta W) + \mathcal{R}_{aux}(\hat{x})
x∗=argx^minLgrad(x^;W,ΔW)+Raux(x^)
其中
x
^
∈
R
K
×
C
×
H
×
W
\hat{x} \in \mathbb{R}^{K\times C\times H\times W}
x^∈RK×C×H×W (
K
K
K 是batch size,
C
,
H
,
W
C,H,W
C,H,W 分别是通道数、高度、宽度), 式子中的
W
W
W 是模型的权重,
Δ
W
\Delta W
ΔW 是聚合后的模型权重的变化量。
其中 L g r a d \mathcal{L}_{grad} Lgrad 的目的是,找到一些可能的输入,使得用这些输入训练后得到的权重,与聚合后的权重尽可能一致。
具体形式为
L
g
r
a
d
(
x
^
;
W
,
Δ
W
)
=
α
G
Σ
l
∣
∣
∇
W
(
l
)
L
(
x
^
,
y
^
)
−
Δ
W
(
l
)
∣
∣
2
\mathcal{L}_{grad}(\hat{x};W,\Delta W)=\alpha_G\Sigma_{l}||\nabla_{W^{(l)}}\mathcal{L}(\hat{x},\hat{y}) - \Delta W^{(l)}||_2
Lgrad(x^;W,ΔW)=αGΣl∣∣∇W(l)L(x^,y^)−ΔW(l)∣∣2
其中
Δ
W
(
l
)
=
∇
W
(
l
)
L
(
x
∗
,
y
∗
)
\Delta W^{(l)} = \nabla_{W^{(l)}}\mathcal{L}(x^*,y^*)
ΔW(l)=∇W(l)L(x∗,y∗), 代表真实的训练数据导致的第
l
l
l 层权重的变化量
先前的优化式子还有一项,称之为辅助的正则项(auxiliary regularization),具体形式为
R
a
u
x
(
x
)
=
R
f
i
d
e
l
i
t
y
(
x
)
+
R
g
r
o
u
p
(
x
)
\mathcal{R}_{aux}(x) = \mathcal{R}_{fidelity}(x) + \mathcal{R}_{group}(x)
Raux(x)=Rfidelity(x)+Rgroup(x)
由两项组成,第一项驱使
x
x
x 与真实的训练样本相似 ,第二项是一致性,我们会在后续给出说明。
批量标签恢复 (Batch Label Restoration)
考虑分类任务,记真实数据为 x ∗ = [ x 1 , x 2 , . . . , x K ] x^* = [x_1,x_2,...,x_K] x∗=[x1,x2,...,xK] , 对应的标签为 y ∗ = [ y 1 , y 2 , . . . , y K ] y^* = [y_1,y_2,...,y_K] y∗=[y1,y2,...,yK]
对应的真实的梯度为
∇
W
L
(
x
∗
,
y
∗
)
=
1
K
∑
k
∇
W
L
(
x
k
,
y
k
)
\nabla_W\mathcal{L}(x^*,y^*) = \frac{1}{K}\sum_{k}\nabla_W\mathcal{L}(x_k,y_k)
∇WL(x∗,y∗)=K1k∑∇WL(xk,yk)
其中的误差函数可以理解为交叉熵(Cross-Entropy)误差
在分类任务中,网络的最后一层通常是一个全连接的线性层,我们将其记作 W ( F C ) ∈ R M × N W^{(FC)}\in \mathbb{R}^{M\times N} W(FC)∈RM×N
其中 M M M 是输入特征的维数, N N N 是目标类别的总数目
对于训练样本 ( x k , y k ) (x_k,y_k) (xk,yk) 而言,记其线性层的增量为 Δ W m , n , k ( F C ) = ∇ w m , n L ( x k , y k ) \Delta W^{(FC)}_{m,n,k}=\nabla_{w_{m,n}}\mathcal{L}(x_k,y_k) ΔWm,n,k(FC)=∇wm,nL(xk,yk)
应用链式法则,可以得到:
Δ
W
m
,
n
,
k
(
F
C
)
=
∇
z
n
,
k
L
(
x
k
,
y
k
)
×
∂
z
n
,
k
∂
w
m
,
n
\Delta W^{(FC)}_{m,n,k} = \nabla_{z_{n,k}}\mathcal{L}(x_k,y_k)\times\frac{\partial z_{n,k}}{\partial w_{m,n}}
ΔWm,n,k(FC)=∇zn,kL(xk,yk)×∂wm,n∂zn,k
其中
z
n
,
k
z_{n,k}
zn,k 代表输入为
x
k
x_k
xk 的最终经过softmax层的第
n
n
n 个输出,梯度的形式为
∇
z
n
,
k
L
(
x
k
,
y
k
)
=
p
k
,
n
−
y
k
,
n
\nabla_{z_{n,k}}\mathcal{L}(x_k,y_k)=p_{k,n} - y_{k,n}
∇zn,kL(xk,yk)=pk,n−yk,n
也就是对应类别的概率减去标签值
注意到:
∂
z
n
,
k
∂
w
m
,
n
=
o
m
,
k
\frac{\partial z_{n,k}}{\partial w_{m,n}} = o_{m,k}
∂wm,n∂zn,k=om,k
其中
o
m
,
k
o_{m,k}
om,k 就是全链接层的第
m
m
m 个输入。
这里需要解释一下,因为 W ( F C ) ∈ R M × N W^{(FC)}\in \mathbb{R}^{M\times N} W(FC)∈RM×N ,其输入为一个 M M M 维向量 v ∈ R M v \in \mathbb{R}^M v∈RM
对于一个特定的类别 n n n , 其输出为 z n = v ⋅ W [ : , n ] = ∑ i = 1 M v i w i , n z_n = v\cdot W[:,n] = \sum_{i=1}^{M} v_{i}w_{i,n} zn=v⋅W[:,n]=∑i=1Mviwi,n
那么,立即有 ∂ z n , k ∂ w m , n = ∂ ∑ i = 1 M v i w i , n ∂ w m , n = v m \frac{\partial z_{n,k}}{\partial w_{m,n}} = \frac{\partial \sum_{i=1}^{M} v_{i}w_{i,n}}{\partial w_{m,n}} = v_{m} ∂wm,n∂zn,k=∂wm,n∂∑i=1Mviwi,n=vm
v m v_m vm 也就是 o m , k o_{m,k} om,k
由于线性层的输入,通常都是经过ReLU或者sigmoid的激活,所以一般都是非负的,
那么,先前的全连接层的参数的增量 Δ W m , n , k ( F C ) = ∇ z n , k L ( x k , y k ) × ∂ z n , k ∂ w m , n \Delta W^{(FC)}_{m,n,k} = \nabla_{z_{n,k}}\mathcal{L}(x_k,y_k)\times\frac{\partial z_{n,k}}{\partial w_{m,n}} ΔWm,n,k(FC)=∇zn,kL(xk,yk)×∂wm,n∂zn,k ,其中的 ∇ z n , k L ( x k , y k ) \nabla_{z_{n,k}}\mathcal{L}(x_k,y_k) ∇zn,kL(xk,yk) 这一部分,当且仅当 n = n k ∗ n = n_k^* n=nk∗ (也就是对应正确的类别时) 这一部分为负。
于是,针对输入
x
k
x_k
xk , 我们可以通过上述变化量的符号来判别目标类别,记
S
n
,
k
=
∑
m
Δ
W
m
,
n
,
k
(
F
C
)
=
∑
m
∇
z
n
,
k
L
(
x
k
,
y
k
)
×
o
m
,
k
S_{n,k} = \sum_{m}\Delta W^{(FC)}_{m,n,k}=\sum_{m}\nabla_{z_{n,k}}\mathcal{L}(x_k,y_k)\times o_{m,k}
Sn,k=m∑ΔWm,n,k(FC)=m∑∇zn,kL(xk,yk)×om,k
一旦
S
n
,
k
<
0
S_{n,k} \lt 0
Sn,k<0 , 便意味着
x
k
x_k
xk 的类别是
n
n
n
不过,上述这一切都是基于单个输入
x
k
x_k
xk 的,针对
K
K
K 个输入,我们有
s
n
=
1
K
∑
k
S
n
,
k
=
∑
m
(
1
K
∑
k
Δ
W
m
,
n
,
k
(
F
C
)
)
s_n = \frac{1}{K}\sum_{k}S_{n,k} = \sum_{m}(\frac{1}{K}\sum_k\Delta W^{(FC)}_{m,n,k})
sn=K1k∑Sn,k=m∑(K1k∑ΔWm,n,k(FC))
这样便产生了一个问题:平均之后的增量,信息出现了丢失,该如何推断类别呢?
这个工作有一个发现,即
∣
S
n
k
∗
,
k
∣
≫
∣
S
n
≠
n
k
∗
,
k
∣
|S_{n_k^*, k}| \gg |S_{n\neq n^*_k, k}|
∣Snk∗,k∣≫∣Sn=nk∗,k∣
这意味着,标签的显著性还是比较高的,我们还是可以通过其绝对值来推断,并且,多个样本的梯度聚合之后,负的部分仍然是负的,显现出原始标签的信息。
为了使得这种负号的标志更为鲁棒,文章使用了逐列的最小值,而不是按照特征维度进行求和
即
y
^
=
arg
sort
(
min
m
∇
W
m
,
n
(
F
C
)
L
(
x
∗
,
y
∗
)
)
[
:
K
]
\hat{y} = \arg \text{sort}(\min_{m}\nabla_{W^{(FC)}_{m,n}}\mathcal{L}(x^*,y^*))[:K]
y^=argsort(mmin∇Wm,n(FC)L(x∗,y∗))[:K]
我们来解释上面这个式子,首先注意到
∇
W
m
,
n
(
F
C
)
L
(
x
∗
,
y
∗
)
∈
R
M
×
N
\nabla_{W^{(FC)}_{m,n}}\mathcal{L}(x^*,y^*) \in \mathbb{R}^{M\times N}
∇Wm,n(FC)L(x∗,y∗)∈RM×N 是一个
M
×
N
M\times N
M×N 的矩阵
min ∇ W m , n ( F C ) L ( x ∗ , y ∗ ) \min \nabla_{W^{(FC)}_{m,n}}\mathcal{L}(x^*,y^*) min∇Wm,n(FC)L(x∗,y∗) 也就是求出这个矩阵最小的那一行,具有 N N N 维, 然后从小到大排序(负的都在前面)
arg sort \arg \text{sort} argsort 其实就是返回排序后的下标,在这里就对应了类别,直接返回前 K K K 小的值,也就对应着 K K K 个样本的类别
这里有一个假设,也就是一个批次里面没有重复类别的数据,大家需要注意一下!
真实性正则化(Fidelity/Realism Regularization)
这里是借鉴 DeepInversion 中针对图片的自然性的优化
Dreaming to distill: Data-free knowledge transfer via DeepInversion.
文中加入了一个正则化项
R
f
i
d
e
l
i
t
y
(
⋅
)
\mathcal{R}_{fidelity}(\cdot)
Rfidelity(⋅),来驱使生成的
x
^
\hat{x}
x^ 尽可能保持真实,具体形式为:
R
f
i
d
e
l
i
t
y
(
x
^
)
=
α
t
v
R
T
V
(
x
^
)
+
α
l
2
R
l
2
(
x
^
)
+
α
B
N
R
B
N
(
x
^
)
\mathcal{R}_{fidelity}(\hat{x}) = \alpha_{tv}\mathcal{R}_{TV}(\hat{x}) + \alpha_{l_2}\mathcal{R}_{l_2}(\hat{x}) + \alpha_{BN}\mathcal{R}_{BN}(\hat{x})
Rfidelity(x^)=αtvRTV(x^)+αl2Rl2(x^)+αBNRBN(x^)
其中
R
T
V
\mathcal{R}_{TV}
RTV 和
R
l
2
\mathcal{R}_{l_2}
Rl2 分别惩罚图像的方差和
L
2
L2
L2 范数,属于标准的图像先验。
DeepInversion中关键的部分就是使用了BN的先验来进行约束
R
B
N
(
x
^
)
=
∑
l
∣
∣
μ
l
(
x
^
)
−
B
N
l
(
m
e
a
n
)
∣
∣
2
+
∑
l
∣
∣
σ
l
2
(
x
^
)
−
B
N
l
(
v
a
r
i
a
n
c
e
)
∣
∣
2
\mathcal{R}_{BN}(\hat{x}) = \sum_{l}||\mu_l(\hat{x}) - BN_l(mean)||_2 +\sum_{l}||\sigma_l^2(\hat{x}) - BN_l(variance)||_2
RBN(x^)=l∑∣∣μl(x^)−BNl(mean)∣∣2+l∑∣∣σl2(x^)−BNl(variance)∣∣2
其中
μ
l
(
x
)
\mu_l(x)
μl(x) 和
σ
l
2
(
x
)
\sigma_l^2(x)
σl2(x) 是第
l
l
l 层卷积的,对于一个批数据的均值和方差的估计
这种真实性的正则化能够促使图片变得更加真实
组一致性正则化(Group Consistency Regularization)
在进行训练数据恢复的时候,会有一个挑战,也就是物体实际位置的确定,如下图所示:
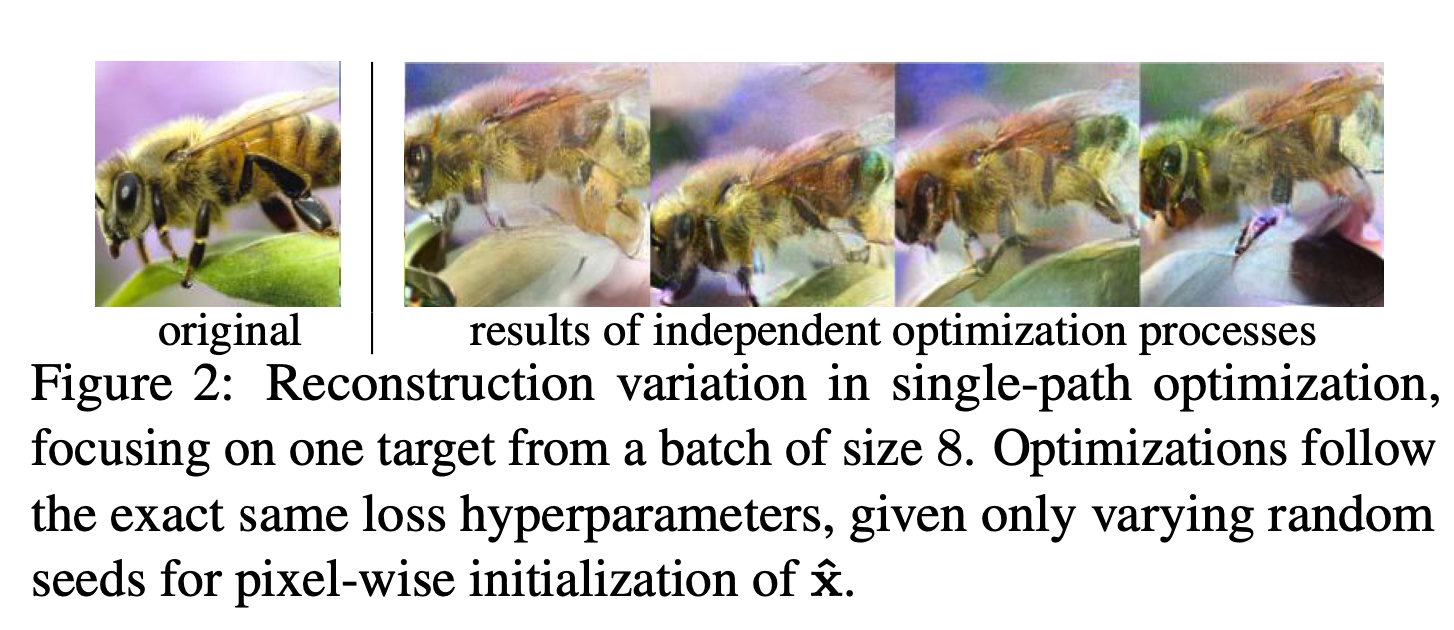
在实验中,作者使用了不同的随机种子进行图像的还原,结果产生不同程度上的偏移,但这些样本其实语义上都是一致的。
基于这个观察,作者提出了一种组一致性的正则化方法,也就是用不同的随机种子生成,然后对这些结果进行融合。
其正则化形式为:
R
g
r
o
u
p
(
x
^
,
x
^
g
∈
G
)
=
α
g
r
o
u
p
∣
∣
x
^
−
E
(
x
^
g
∈
G
)
∣
∣
2
\mathcal{R}_{group}(\hat{x},\hat{x}_{g\in G}) = \alpha_{group}||\hat{x}-\mathbb{E}(\hat{x}_{g\in G})||_2
Rgroup(x^,x^g∈G)=αgroup∣∣x^−E(x^g∈G)∣∣2
其中,我们需要计算出这个期望
E
(
x
^
g
∈
G
)
\mathbb{E}(\hat{x}_{g\in G})
E(x^g∈G),其实就是平均图像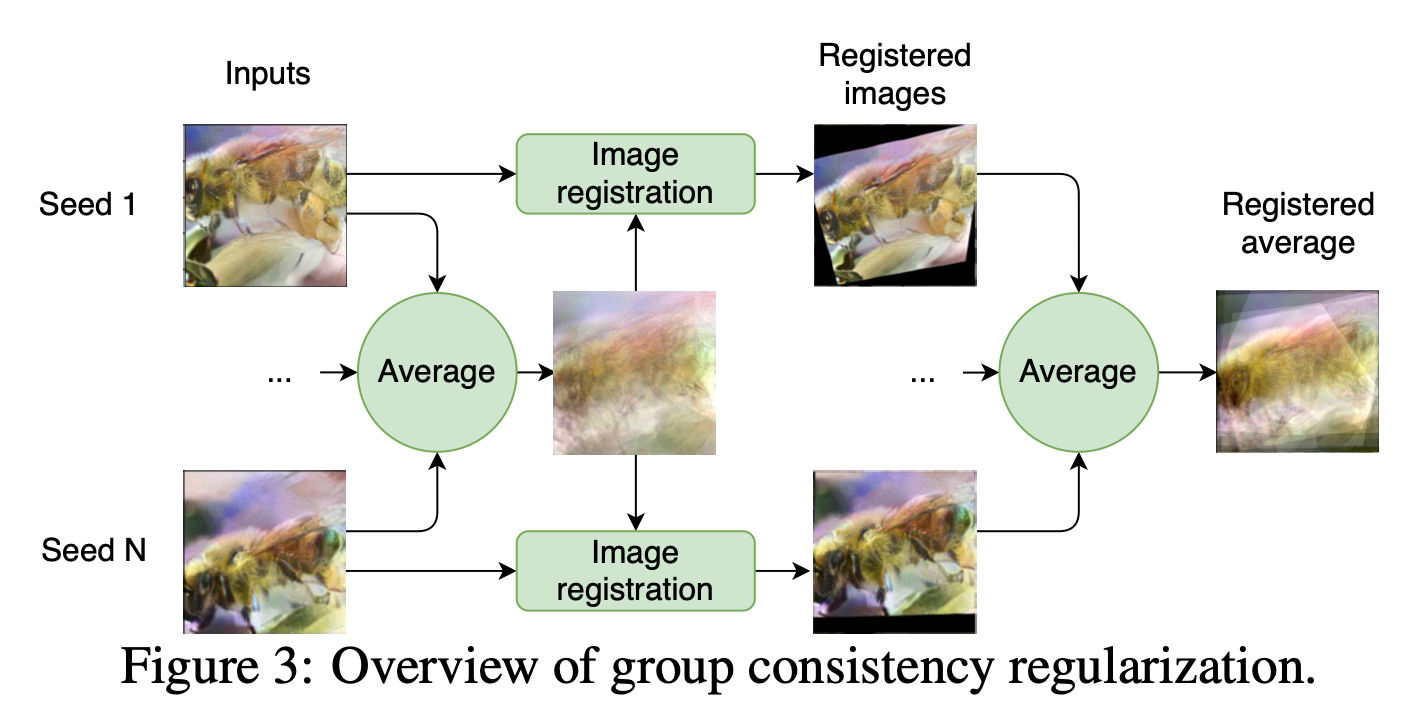
如上图所示,首先按像素进行平均,得到一张平均图像,然后所有图像根据这个平均图像进行对齐,之后再取一次平均,得到最后的对齐后的平均图像。
最终的更新细节
文中使用的是一种基于能量的模型,受 Langevin 的启发,具体形式为
Δ
x
^
(
t
)
←
∇
x
^
(
L
g
r
a
d
(
x
^
(
t
−
1
)
,
∇
W
)
+
R
a
u
x
(
x
^
(
t
−
1
)
)
)
η
←
N
(
0
,
I
)
x
^
(
t
)
←
x
^
(
t
−
1
)
+
λ
(
t
)
Δ
x
^
(
t
)
+
λ
(
t
)
α
n
η
\Delta_{\hat{x}^{(t)}} \leftarrow \nabla_{\hat{x}}(\mathcal{L}_{grad}(\hat{x}^{(t-1)},\nabla W) + \mathcal{R}_{aux}(\hat{x}^{(t-1)}))\\ \eta \leftarrow \mathcal{N}(0, I)\\ \hat{x}^{(t)} \leftarrow \hat{x}^{(t-1)} + \lambda(t)\Delta_{\hat{x}^{(t)}} + \lambda(t)\alpha_n\eta
Δx^(t)←∇x^(Lgrad(x^(t−1),∇W)+Raux(x^(t−1)))η←N(0,I)x^(t)←x^(t−1)+λ(t)Δx^(t)+λ(t)αnη
其中
η
\eta
η 是采样噪声,用于进行搜索;
λ
(
t
)
\lambda(t)
λ(t) 是学习率;
α
n
\alpha_n
αn 是缩放因子。
实验分析
首先我们来看一看标签恢复的正确率
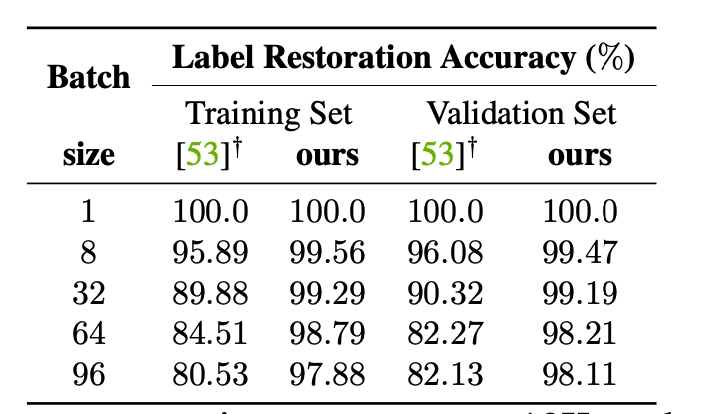
可以看到,随着批次大小的增加,正确率就会下降,原因其实就是重复类别的问题,但是相比起iDLG要好很多。
iDLG: Improved deep leakage from gradients.
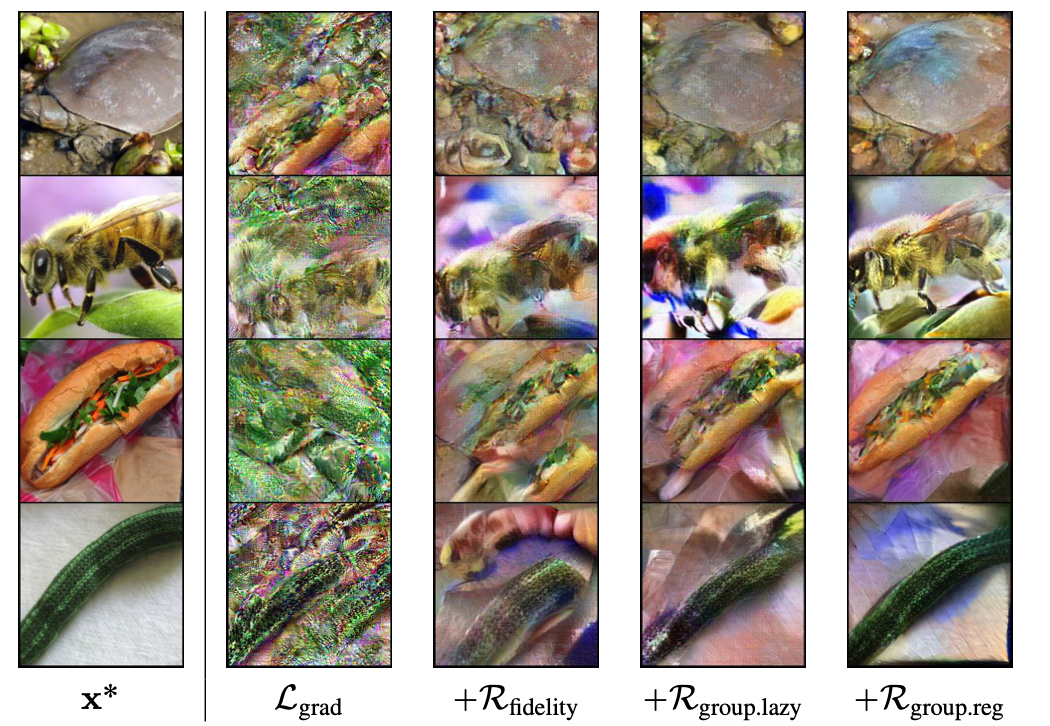
然后是每一个误差项的消融实验
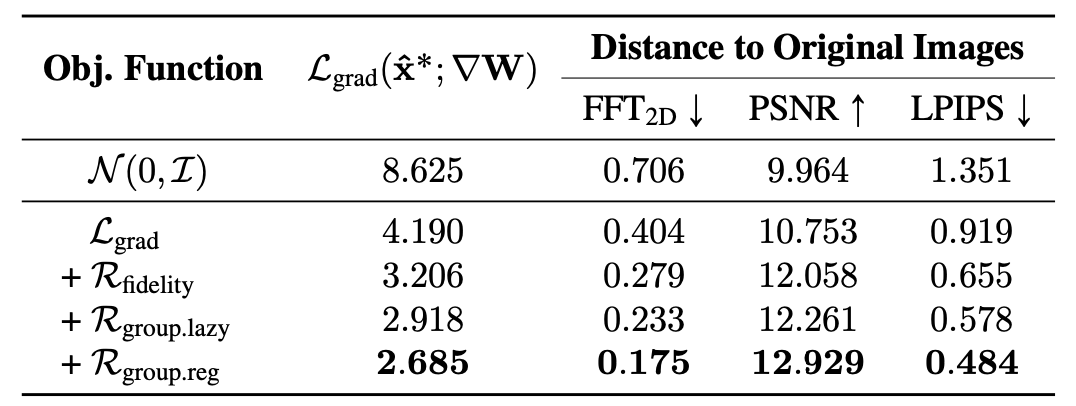
可以看到,添加真实性以及组一致性,的确会使得图片质量上升,对齐的增益也是存在的。
如上图所示,基本上还原的结果已经逼近原始图片了
然后,和目前的SOTA进行效果对比,这里直接给出一部分的结果图
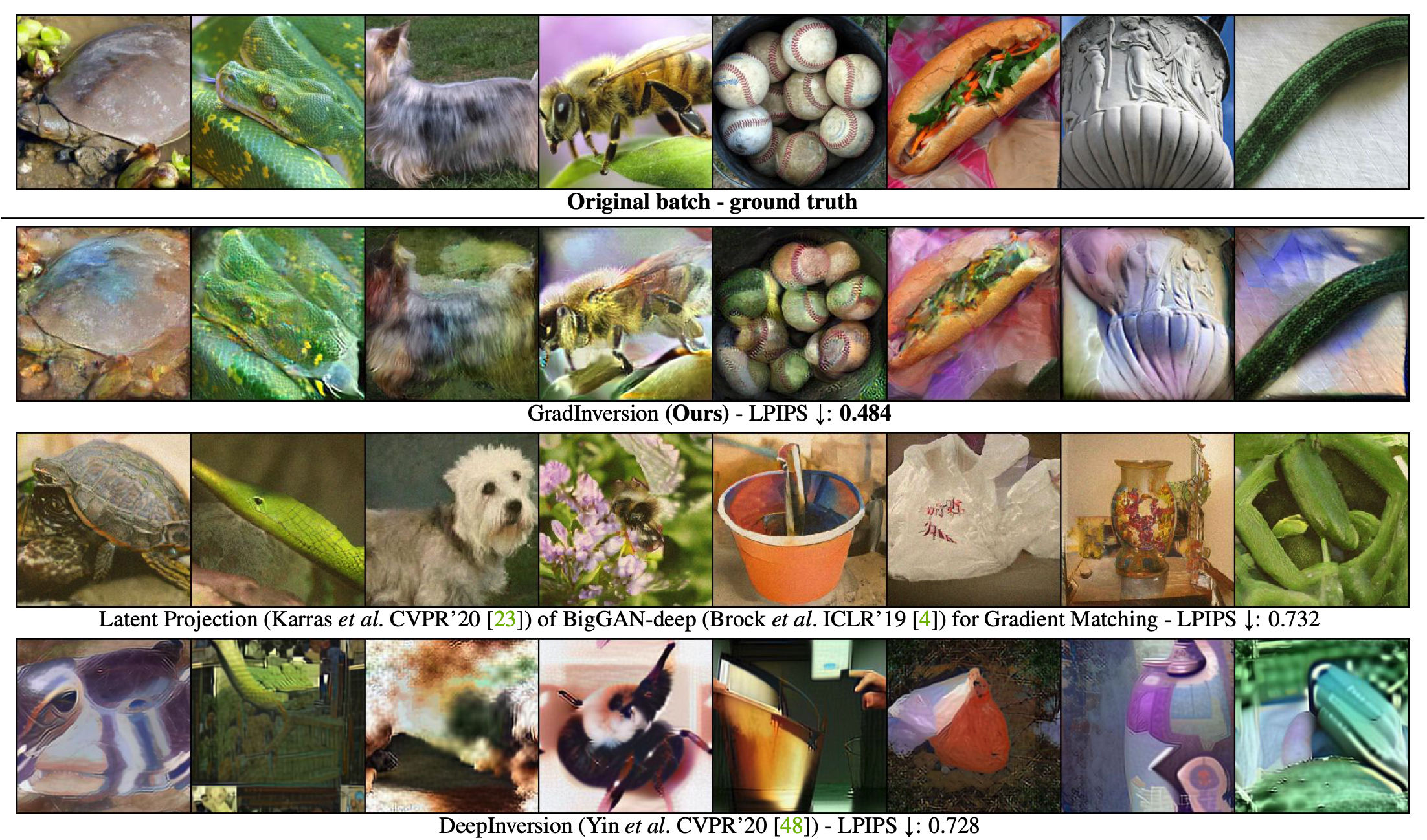
可以看到,其效果要比DeepInversion,Latent Projection等工作要好得多!
之后,我们必须看一看批次大小,也就是BatchSize,对于还原效果的影响
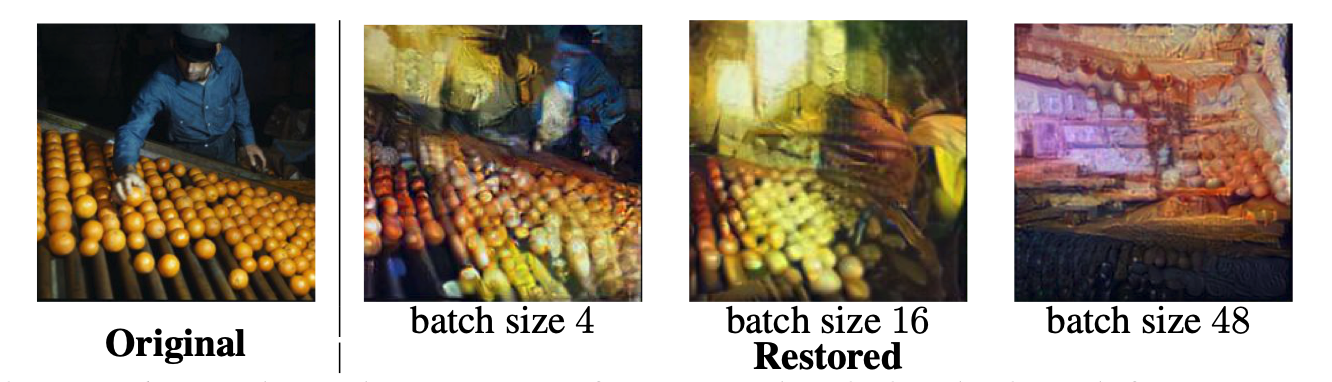
可以看到,随着批次大小的增加,还原效果会变差,这也是符合常理的,因为聚合带来的信息损失会增大。
结论
这个工作是里程碑式的,在联邦学习的场景下,实现了一次强而有力的攻击!
这也会极大的启发,针对联邦学习这种类分布式训练的场景下后续的防御工作。
DP等防御方法是否还能适用?参与者的变动是否会有影响?本地的多次训练是否加大了恢复的难度?
仍然有许多工作需要我们一起探索。

















 1259
1259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









