










 清华大学张莹莹教授团队在《Nature Communications》发表论文,介绍了一种基于导电丝素蛋白离子水凝胶(SIH)纤维的智能感知纺织品。这种纺织品能够对外部危险如火、水和尖锐物体做出电响应,并能精确检测人体触摸,适用于智能可穿戴设备和人机交互。研究展示了导电纤维的制备、性能及其在智能防护和感知应用中的潜力。
清华大学张莹莹教授团队在《Nature Communications》发表论文,介绍了一种基于导电丝素蛋白离子水凝胶(SIH)纤维的智能感知纺织品。这种纺织品能够对外部危险如火、水和尖锐物体做出电响应,并能精确检测人体触摸,适用于智能可穿戴设备和人机交互。研究展示了导电纤维的制备、性能及其在智能防护和感知应用中的潜力。
2024年4月17日,清华大学张莹莹教授(Yingying Zhang)课题组,在《Nature Communications》上发布了一篇题为“Intelligent perceptual textiles based on ionicconductive and strong silk fibers”的论文。论文内容如下:
一、 摘要
将纺织品赋予感知功能,类似于人类皮肤,对于下一代智能可穿戴设备的开发至关重要。迄今为止,能够制备感知潜在危险并准确定位手指触摸的感知纺织品仍然是一个挑战。在本研究中,作者提出了基于导电丝素蛋白离子水凝胶(SIH)纤维设计和制备智能感知纺织品的方案,这些纺织品能够对外部危险做出电响应,并精确检测人体触摸。这些纤维具有优异的断裂强度(55 MPa)、延展性(530%)、稳定且良好的导电性(0.45 S·m(–1)),这归因于定向结构和离子的掺入。作者基于SIH纤维制备了的防护纺织品,可以对火、水以及尖锐物体做出反应,保护机器人免受潜在的伤害。此外,还设计了可以精准定位手指触摸的感知纺织品,作为便利的人机界面。该工作为设计下一代智能可穿戴设备以及重塑人机界面带来了新的启示。
二、背景介绍
感知是人类皮肤的关键功能。虽然基于柔性薄膜的电子产品已经作为电子皮肤得到发展,但基于纺织品的电子产品可以为可穿戴电子产品提供更优异的柔性、透气性和舒适性。将感知功能整合到纺织品中将彻底改变人类与电子设备互动的方式,并促进智能可穿戴产品的进一步发展。 电子纺织品的最新进展已经实现了通信、传感、显示、供电等功能。然而,能够准确地定位人体触摸并帮助人类/机器人识别和应对火灾、水灾和骨折等危险的感知纺织品尚未报道。
为了解决这一挑战,需要柔性、稳固和导电的纤维作为基本单元。虽然金属导线和纳米碳基纤维具有良好的导电性,但它们在受拉力或循环弯曲变形时容易发生电气和机械故障。几何设计,如蛇形、剪纸或皱纹结构,可以赋予纤维一定的可拉伸性,但在与纺织品的兼容性方面存在挑战,并增加了失败和成本的风险。离子凝胶具有固有的柔性、导电性、透明性和韧性。它们可以通过移动离子传输电力,类似于生物组织。因此,具有生物相容性、机械强度和高离子导电性的稳固凝胶纤维有望被编织成所需的智能纺织品。
三、内容详解
3.1 高强度导电SIH纤维的制备
为了制备感知性纺织品,作者首先制备了柔性、强度高且导电的SIH纤维(图1a)。使用连续湿法纺丝方法制备SIH纤维。欲了解详细制备过程,请阅读原文。
图1b显示了制备的SIH纤维卷轴。作者改变了离子液体浴的浓度以优化纤维的性能。制备的SIH纤维具有圆形横截面,表面光滑,透明度高,柔韧性优异,可编织性出色,以及显著的离子导电性。扫描电子显微镜(SEM)图像(图1c、d)显示SIH纤维具有圆形横截面和光滑表面。图1e是一个SIH纤维线圈的照片,展示了纤维优异的透明度和柔性。图1f展示了由SIH纤维制备的9×9 平方厘米的平纹纺织品,展示了它们出色的可编织性。除了良好的透明度和柔性,SIH纤维还具有优异的离子导电性。图1g展示了以SIH纤维作为外部电极的“SILK”图案显示器件的图像(补充视频1)。
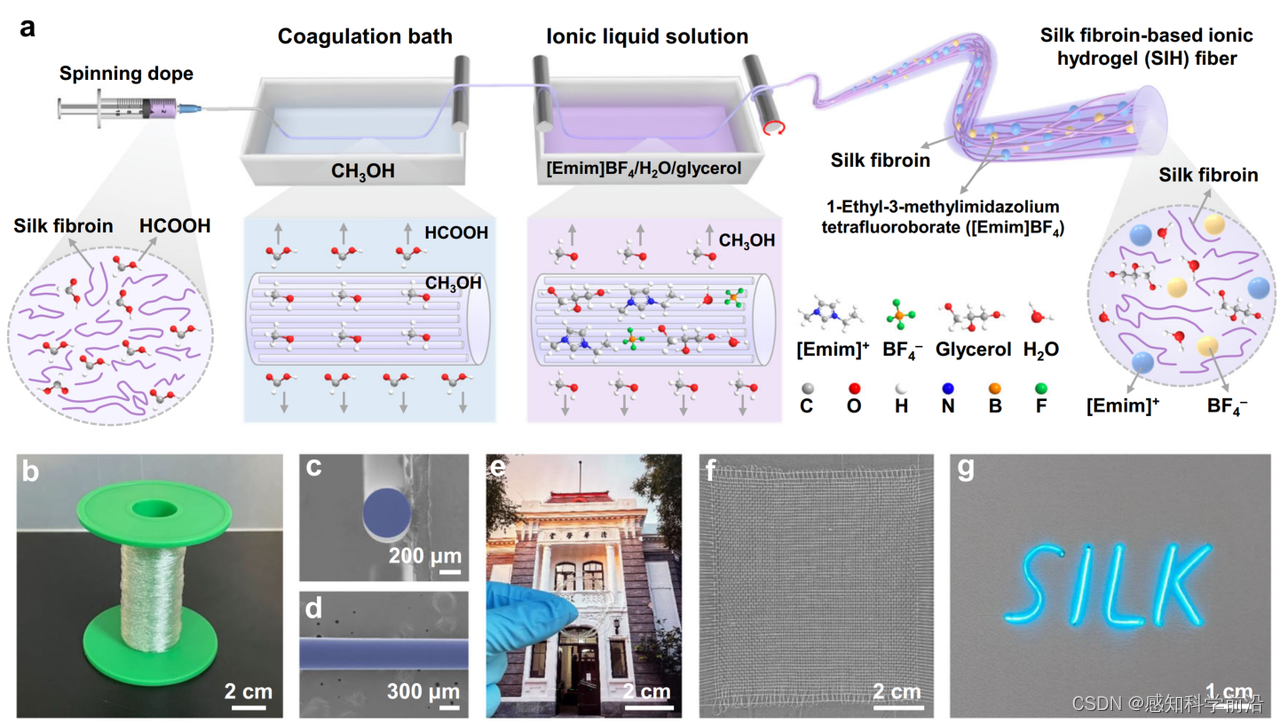
图1 基于丝素蛋白离子水凝胶(SIH)纤维的制备。a SIH纤维制备的示意图。b SIH纤维卷的照片。c、d SIH纤维SEM图像,显示其横截面(c)和表面(d)形态。e SIH纤维卷在彩色图像上的照片,显示其透明度和外观。f 由SIH纤维制备的平纹织物,展示了SIH纤维的可织性。g 电致发光的“SILK”图案,SIH纤维作为柔性透明电极。
3.2 SIH纤维的成分和结构
作者对在不同离子交换条件下制备的SIH纤维的成分和结构进行了全面研究。[Emim]BF4成功地掺入SIH纤维中,这一点通过热重分析(TG)和能谱仪(EDS)得到了证实。图2a、b显示了不同SIH纤维的TG和微商热重分析(DTG)曲线,表明纤维中成分稳定性不同导致的重量损失阶段明显不同。
在30°C至375°C的温度范围内,3.0M-S表现出比对照纤维(0.0M-S)更低的重量损失,表明在SIH纤维中掺入[Emim]BF4后其热稳定性得到改善。EDS分析还证实了SIH纤维中存在[Emim]BF4。如图2c所示,0.0M-S和3.0M-S中的丝蛋白主要元素为C和O。
图2d显示了不同SIH纤维样品的傅里叶变换红外光谱(FTIR)谱图。通过对FTIR酰胺I带的反卷积和偏正光显微镜(POM)测试显示,SIH纤维具有半结晶和定向结构。对FTIR酰胺I带的反卷积显示所有样品中晶体(β-sheet) 和非晶体((α-helical/random coil)结构的含量相似(图2e),表明[Emim]BF4的掺入对纤维的结晶度没有显著影响。纤维的POM图像显示(图2f),纤维中的双轴晶体优先沿纤维轴线排列,而不是沿其他方向。当纤维轴线与偏振器平行时,在POM图像中无法观察到纤维,但在45°旋转后出现,证实了纤维的定向结构。
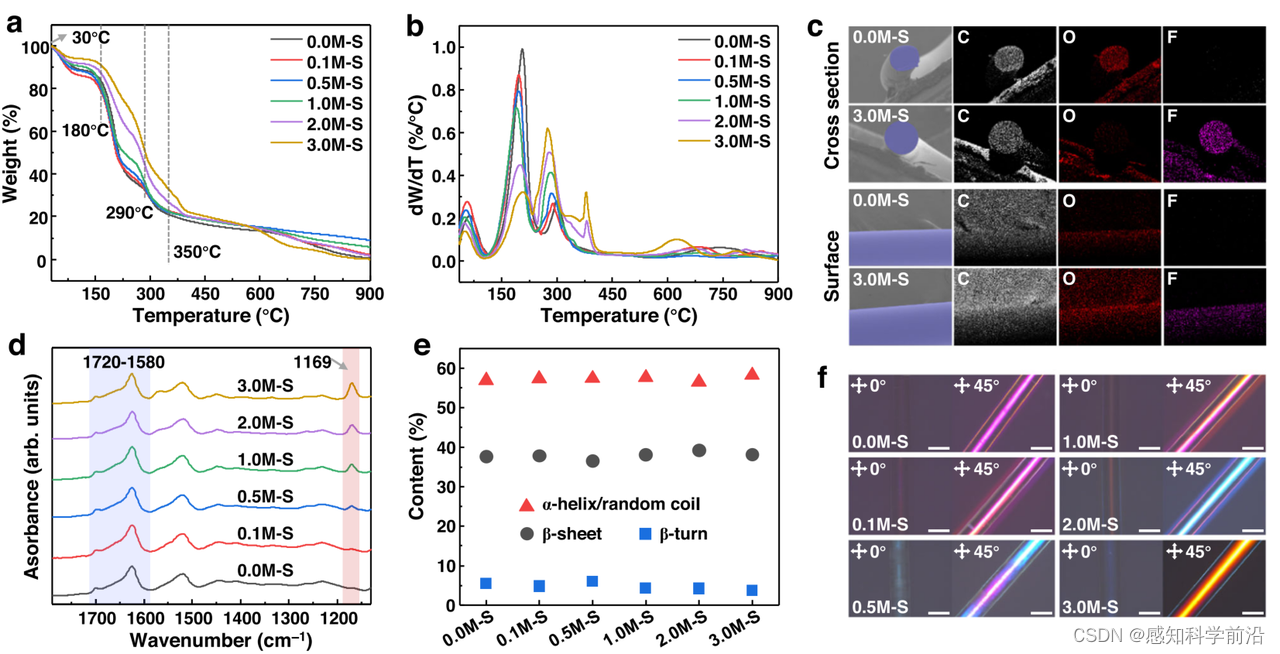
图2 不同SIH纤维样品的组成和结构分析。a,b TG(a)和DTG(b)曲线。c SEM图像和相应的EDS映射。d FTIR光谱。e 不同SIH纤维样品的二级结构含量。f SIH纤维的POM图像。比例尺,500μm。
3.3 SIH纤维的机械和电气性能
SIH纤维具有优异的机械性能,具有高抗拉强度和优异的延展性。图3a展示了各种SIH纤维样品的典型应变-应力曲线。0.0M-S的抗拉强度和断裂伸长率分别为2.5 MPa和450%。[Emim] BF4浓度的增加会导致机械性能略微降低。这些发现表明,制备的水凝胶蚕丝纤维具有比天然丝素纤维更优异的拉伸性。此外,SIH纤维在循环加载和卸载拉伸应力时表现出明显的迟滞。应力-应变曲线显示,在第一次训练周期后,SIH纤维几乎没有发生塑性变形,表明具有良好的抗疲劳性能。
在离子交换之前进行拉伸处理可以进一步提高SIH纤维的机械强度。在本研究中,在离子交换之前对再生蚕丝纤维进行了不同比例的拉伸处理。随着拉伸比例从0%增加到200%,纤维直径逐渐减小。所有组中的蚕丝纤维直径均匀,表面光滑。图3b显示了不同拉伸比下的SIH纤维的应变-应力曲线。将纤维拉伸100%会导致抗拉强度为最高达55 MPa,比先前报道的水凝胶纤维(小于10 MPa)高出几倍。然而,过度拉伸(拉伸比≥150%)会降低强度和延展性,可能是由于引入了缺陷。尽管如此,所有拉伸SIH纤维的强度都明显高于未拉伸的SIH纤维。
SIH纤维表现出优异的离子导电性。如图3c所示,从0.0M-S到1.0M-S,导电率逐渐增加,这归因于SIH纤维中离子液体含量的迅速增加。当浓度达到2.0M时,SIH纤维的导电率增加速率减缓,这是因为在高浓度离子液体溶液中带相反电荷的离子之间相互作用增强阻碍了离子的迁移。此外,纤维的电性能对于各种变形是不敏感的,如其在按压或弯曲时保持稳定的电流(图3d,e)。 拉伸导致电流轻微下降,可能是由于长度增加和直径减小,但纤维仍能保持适度的电流直至断裂(图3f)。这些结果证明了SIH纤维在实际应用中具有高可靠性和鲁棒性。
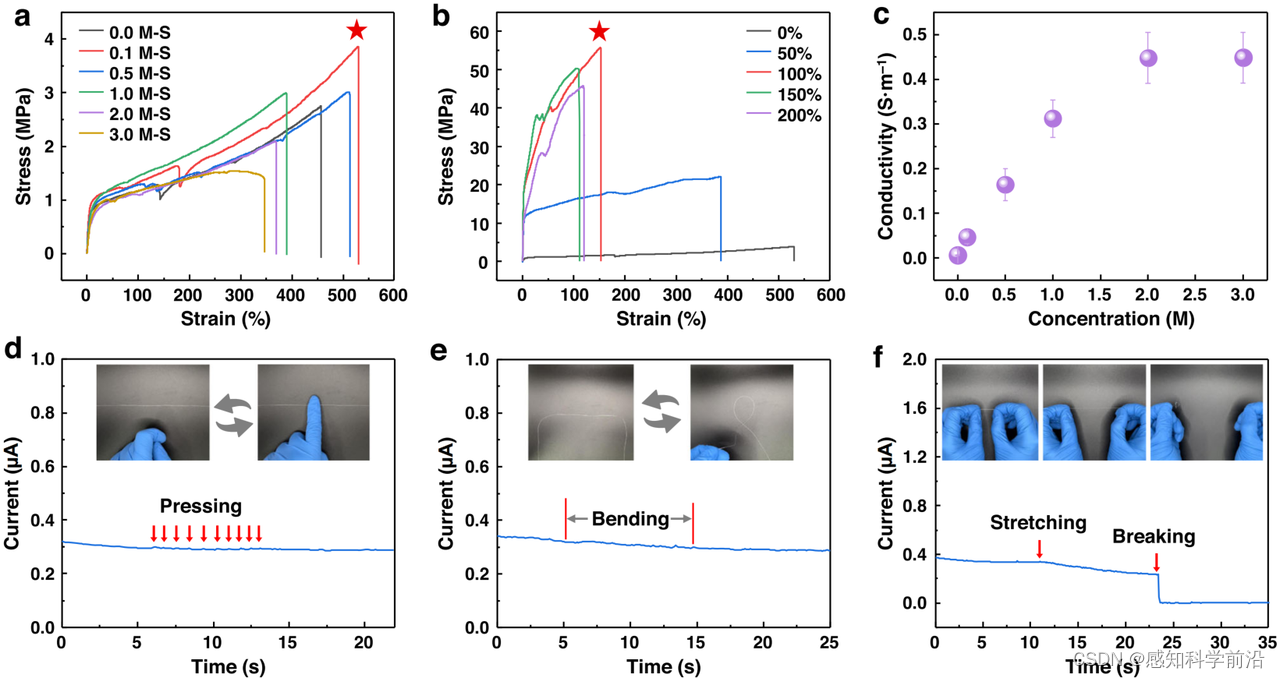
图3 SIH纤维的机械和电学性能。a 具有不同浓度[Emim]BF4的SIH纤维的应变-应力曲线。b 制备过程中采用不同拉伸比例处理的SIH纤维的应变-应力曲线。c SIH纤维的导电率与[Emim]BF4浓度的关系图。误差棒显示标准偏差(每组n = 3)。d-f 当SIH纤维受压(d)、弯曲(e)、拉伸(f)时电流的演变,显示在机械变形下的稳定导电性。插图显示相应的图像。
3.4 识别危险的感知纺织品
作者探讨了SIH纤维在智能纺织品领域的潜在应用。这些纤维具有响应各种危险情况的独特能力,比如火、水和尖锐物体。因此,它们可以用于制造能够保护人类和机器人免受烧伤、浸湿和皮肤划伤的智能纺织品。 为了验证概念,为机器人手制造了一种智能保护手套,其中包含SIH纤维(图4a)并集成了电路系统。当暴露于危险环境时,智能手套会产生相应的电信号。如图4b所示,SIH纤维在接触火时电流突然增加,然后下降至零。图4c描述了SIH纤维在暴露于火焰时的结构演变。火的温度为981°C。根据图2a可知,SIH纤维在这个温度下被分解并碳化。因此,图4b中电流的上升归因于温度的升高和SIH纤维的碳化。电流降至零的原因是SIH纤维的失效。水也可能对机器人造成危险,因为会导致短路。作者观察到,当一滴水落在SIH纤维上时,电流会瞬间增加然后逐渐减小。 如图4d所示,当三滴水依次滴落时,观察到了三个明显的步骤。这是因为SIH纤维吸水后膨胀,提高了它们的离子传输能力(见图4e)。此外,尖锐物体可以穿透机器人的皮肤,这也可以通过SIH纤维集成手套来检测。如图4f所示,当SIH纤维断裂时,电流下降至零,表明了导电路径的破裂(图4g)。根据电流对不同刺激的不同响应,SIH纤维集成纺织品可以检测和区分不同的危险情况。
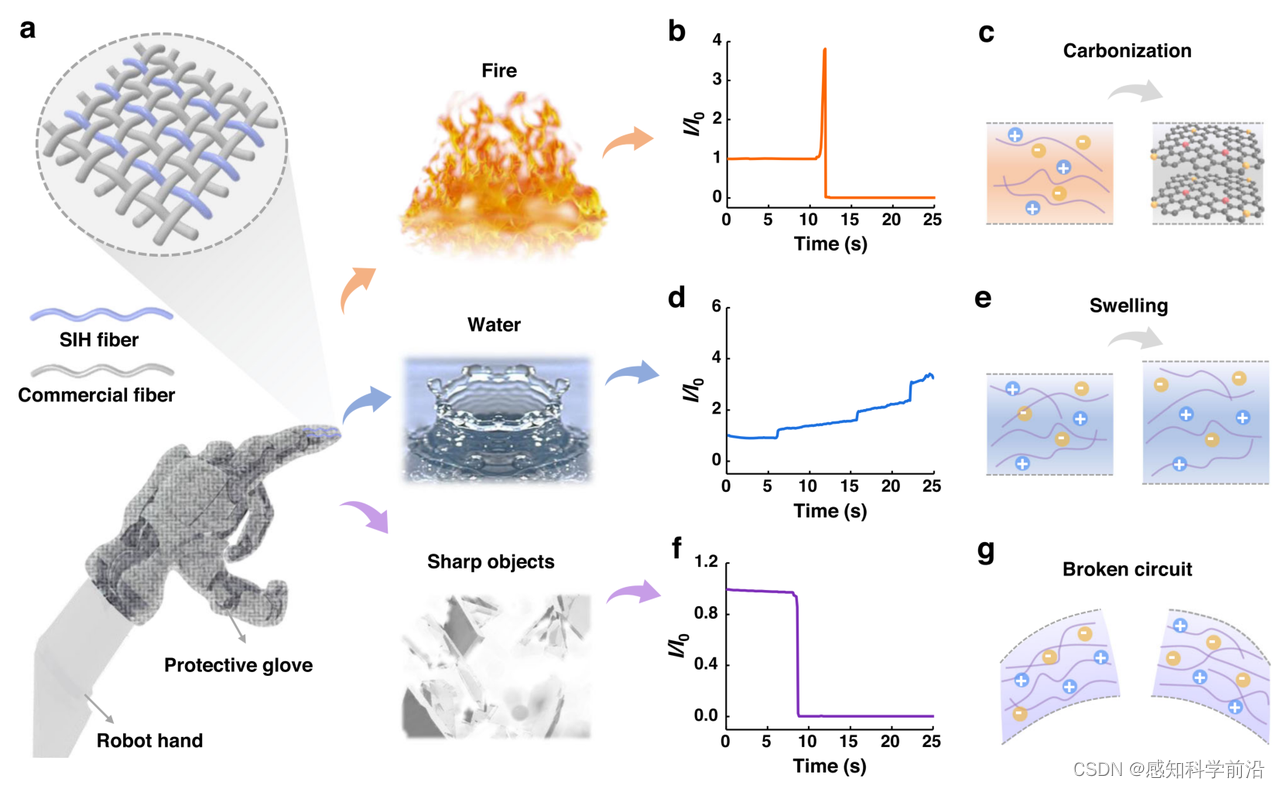
图4 SIH纤维对火、水和切割的电响应,在识别和警示危险方面显示出潜在的应用。a 示意图展示了一个机器手戴着一块基于SIH纤维的纺织品,可以检测火烧、水浸和锋利物体切割。b-g SIH纤维对火(b, c)、水(d, e)和切割(f, g)的特征电学响应以及相应的工作机理。
3.5 用于人机交互的感知纺织品
作者进一步使用SIH纤维设计并制备了感知纺织品,它能够精确和特定地检测人体触摸的发生和位置,使其成为可穿戴人机界面的理想选择。如图5a所示,一个人能够通过触摸这些感知纺织品来控制机器人手。图5b显示了基于单个SIH纤维的感知纺织品的等效电路。如图5c所示,计算结果表明基于单个SIH纤维的感知纺织品可以精确检测触摸位置。
此外,作者设计并成功地将SIH纤维编织到平纹织物中。图5d显示了在手指触摸下感知纺织品的等效电路。作为验证概念,作者将整个纺织品分成了能代表不同命令的九个区域。如图5e所示,可以准确识别每个触摸区域的触摸点位置。如图5f所示,通过触摸基于SIH纤维的纺织品产生的电信号被数据采集设备记录,并由计算机或智能手机中的软件处理以计算触摸点。然后,触摸点与不同的命令相关联,这些命令被传输以控制终端。作为验证概念,作者成功地使用基于SIH纤维的纺织品控制机器手执行各种手势(附录视频2)。
与以往的触觉纺织品相比,该工作的感知纺织品展现出明显的差异。首先,该工作的纺织品的纤维是可拉伸的离子导电纤维,而不是坚硬的铁丝,使得该工作的纺织品可拉伸性、柔性和电气稳定性。其次,通过开发表面电容传感系统实现感知功能,而不是采用压阻、压电或静电感应原理,这使作者的纺织品仅对人体触摸做出选择性响应,而不对任何外部压力刺激做出反应。最后,该工作的感知纺织品最大程度地减少了布线需求,并消除了对复杂外部电路的需求。
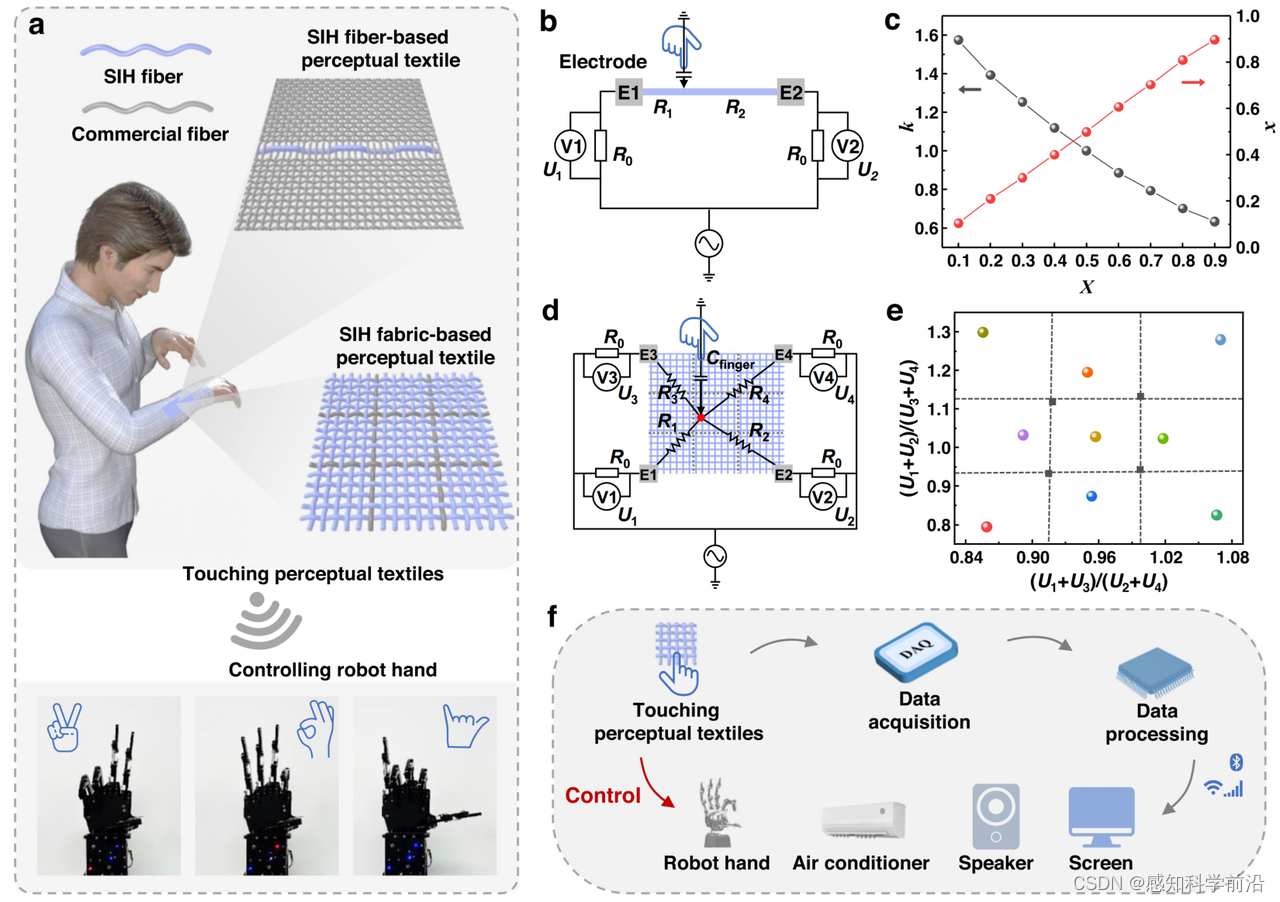
图5 基于SIH纤维的感知纺织品用于人机界面。 a 插图显示一个人触摸基于SIH纤维的纤维/纺织品来控制机器手势。b 基于SIH纤维的触摸纤维的电路图。c 根据(b)中触摸点位置计算得出比例因子k和位置x。d 基于SIH纤维的触摸纺织品的电路图。e 根据(d)中触摸位置计算得到的触摸点。f 通过触摸基于SIH纤维的感知纺织品来控制各种设备的图示。
四、总结
作者利用具有稳定离子导电率、高强度、优异延展性和良好柔韧性的SIH纤维,开发了一种革命性的感知纺织品,能够感知危险和人体触摸。这种卓越的纤维是通过连续湿法纺丝工艺制备的,由天然提取的纤维素、离子液体和甘油组成。由于其半结晶和定向结构,该纤维显示出高达55 MPa的强度,超过了其他报道的离子水凝胶纤维(小于10 MPa)。水凝胶使得纤维能够延伸至530%,比天然蚕丝纤维高出20倍。掺入的[Emim]BF4使得纤维具有优异且稳定的电导率(0.45 S·m^-1)。基于SIH纤维的优异机械性能和电导率,作者设计并制备了感知纺织品。这些纺织品可以帮助人类或机器人在面临火、水和尖锐物体等潜在危险时作出电响应。 此外,这些感知纺织品还集成了表面电容触摸电路系统,可以检测和定位手指触摸,使其非常适用于可穿戴人机界面。作者的感知纺织品已成功用于远程控制机器人手,展示了它们在远程控制和通信等应用方面的潜力。鉴于SIH纤维具有出色的机械性能、稳定和良好的导电性,以及其前躯体材料具有可持续性、生物安全性和生物降解性,作者预计它将成为其他功能单元制造的优异候选材料。
五、文献
Lu, H., Zhang, Y., Zhu, M. et al. Intelligent perceptual textiles based on ionic-conductive and strong silk fibers. Nat Commun 15, 3289 (2024). https://doi.org/10.1038/s41467-024-47665-y
声明:仅代表作者个人观点,作者水平有限,如有不科学之处,请在评论区留言指正!




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











