







参考链接:https://www.cnblogs.com/zyly/p/9366080.html
随着20世纪后期引入便宜的针孔相机,它们在日常生活中成为常见的事件。不幸的是,这种廉价的价格是:显著的扭曲。幸运的是,这些是常数,校准和一些重新映射,我们可以纠正这一点。此外,通过校准,您还可以确定相机的自然单位(像素)与实际单位之间的关系(例如毫米)。
理论
对于失真,OpenCV考虑到径向和切向因素。对于径向因子,使用以下公式:
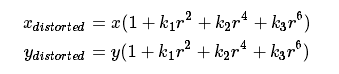
因此,对于坐标处的未失真像素点 (x,y),其在失真图像上的位置将为 。径向变形的存在表现为“barrel”或“fish-eye”效应的形式
。径向变形的存在表现为“barrel”或“fish-eye”效应的形式
由于摄像镜头不完全平行于成像平面,因此会发生切向畸变。它可以通过公式表示:

所以我们有五个失真参数,它们在OpenCV中呈现为具有5列的一行矩阵:

现在对于单位转换,我们使用以下公式:
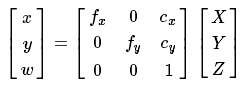
这里通过使用单应性坐标系(w = Z)来解释w的存在。未知参数是fx和fy(摄像机焦距)和(cx,cy),它们是以像素坐标表示的光学中心。如果对于两个轴,使用给定的a纵横比(通常为1)的公共焦距,则fy=fx∗a a,并且在上面的公式中,我们将具有单个焦距f。包含这四个参数的矩阵称为相机矩阵。虽然失真系数是相同的,无论使用的相机分辨率,这些应该与校准分辨率的当前分辨率一起缩放。
确定这两个矩阵的过程是校准。这些参数的计算是通过基本几何方程来完成的。所使用的方程取决于所选择的校准对象。
目标
示例应用程序将:
- 确定失真矩阵
- 确定相机矩阵
- 从相机,视频和图像文件列表中输入
- 从XML / YAML文件读取配置
- 将结果保存到XML / YAML文件中
- 计算重新投影误差
获取矫正参数矩阵:
/********************************************************************
Copyright(C),
Filename: ...\Calibration_Sheng\Calibration_Sheng\calib_2d.cpp
Description: 使用棋盘格标定的流程
Others:函数使用标准化
Function List:
History:
*********************************************************************/
//https://www.w3cschool.cn/opencv/opencv-64352dtf.html
#include "opencv2/core.hpp"
#include <opencv2/core/utility.hpp>
#include "opencv2/imgproc.hpp"
#include "opencv2/calib3d.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/videoio.hpp"
#include "opencv2/highgui.hpp"
#include <cctype>
#include <stdio.h>
#include <string.h>
#include <time.h>
#include <iostream>
#include <fstream>
#include <string>
#include <sstream>
using namespace cv;
using namespace std;
enum { DETECTION = 0, CAPTURING = 1, CALIBRATED = 2 };
enum Pattern { CHESSBOARD, CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID };
/**
* @name computeReprojectionErrors
* @brief 计算投影误差
* @note
* @param [in] const std::vector<std::vector<cv::Point3f> > & objectPoints 目标三维空间坐标
* @param [in] const std::vector<std::vector<cv::Point2f> > & imagePoints 目标图像中的坐标
* @param [in] const std::vector<cv::Mat> & rvecs 旋转矩阵
* @param [in] const std::vector<cv::Mat> & tvecs 平移矩阵
* @param [in] const cv::Mat & cameraMatrix 相机内参数
* @param [in] const cv::Mat & distCoeffs
* @param [in/out] std::vector<float> & perViewErrors
* @return double
*/
static double computeReprojectionErrors(
const std::vector<std::vector<cv::Point3f> >& objectPoints,
const std::vector<std::vector<cv::Point2f> >& imagePoints,
const std::vector<cv::Mat>& rvecs, const std::vector<cv::Mat>& tvecs,
const cv::Mat& cameraMatrix, const cv::Mat& distCoeffs,
std::vector<float>& perViewErrors )
{
std::vector<cv::Point2f> imagePoints2;
int i, totalPoints = 0;
double totalErr = 0, err;
perViewErrors.resize(objectPoints.size());
for( i = 0; i < (int)objectPoints.size(); i++ )
{
projectPoints(cv::Mat(objectPoints[i]), rvecs[i], tvecs[i],
cameraMatrix, distCoeffs, imagePoints2);
err = cv::norm(cv::Mat(imagePoints[i]), cv::Mat(imagePoints2), cv::NORM_L2);
int n = (int)objectPoints[i].size();
perViewErrors[i] = (float)std::sqrt(err*err/n);
totalErr += err*err;
totalPoints += n;
}
return std::sqrt(totalErr/totalPoints);
}
static void calcChessboardCorners(cv::Size boardSize, float squareSize, std::vector<cv::Point3f>& corners/*, Pattern patternType = CHESSBOARD*/)
{
corners.resize(0);
for( int i = 0; i < boardSize.height; i++ )
{
for( int j = 0; j < boardSize.width; j++ )
{
corners.push_back(cv::Point3f(float(j*squareSize),
float(i*squareSize), 0));
}
}
/*switch(patternType)
{
case CHESSBOARD:
case CIRCLES_GRID:
for( int i = 0; i < boardSize.height; i++ )
for( int j = 0; j < boardSize.width; j++ )
corners.push_back(cv::Point3f(float(j*squareSize),
float(i*squareSize), 0));
break;
case ASYMMETRIC_CIRCLES_GRID:
for( int i = 0; i < boardSize.height; i++ )
for( int j = 0; j < boardSize.width; j++ )
corners.push_back(cv::Point3f(float((2*j + i % 2)*squareSize),
float(i*squareSize), 0));
break;
default:
CV_Error(Error::StsBadArg, "Unknown pattern type\n");
}*/
}
static bool runCalibration( std::vector< std::vector<cv::Point2f> > imagePoints,
cv::Size imageSize, cv::Size boardSize, /*Pattern patternType,*/
float squareSize, /*float aspectRatio,*/
int flags, cv::Mat& cameraMatrix, cv::Mat& distCoeffs,
std::vector<cv::Mat>& rvecs, std::vector<cv::Mat>& tvecs,
std::vector<float>& reprojErrs,
double& totalAvgErr,double& rms)
{
cameraMatrix = cv::Mat::eye(3, 3, CV_64F);
/*if( flags & cv::CALIB_FIX_ASPECT_RATIO )
cameraMatrix.at<double>(0,0) = aspectRatio;*/
distCoeffs = cv::Mat::zeros(8, 1, CV_64F);
std::vector<std::vector<cv::Point3f> > objectPoints(1);
calcChessboardCorners(boardSize, squareSize, objectPoints[0]/*, patternType*/);
objectPoints.resize(imagePoints.size(),objectPoints[0]);
/*double */rms = calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix,
distCoeffs, rvecs, tvecs, flags|cv::CALIB_FIX_K4|cv::CALIB_FIX_K5);
///*|CALIB_FIX_K3*/|CALIB_FIX_K4|CALIB_FIX_K5);
printf("RMS error reported by calibrateCamera: %g\n", rms);
bool ok = checkRange(cameraMatrix) && checkRange(distCoeffs);
totalAvgErr = computeReprojectionErrors(objectPoints, imagePoints,
rvecs, tvecs, cameraMatrix, distCoeffs, reprojErrs);
return ok;
}
static void saveCameraParams( const std::string& filename,
cv::Size imageSize, cv::Size boardSize,
float squareSize, /*float aspectRatio,*/ int flags,
const cv::Mat& cameraMatrix, const cv::Mat& distCoeffs,
const std::vector<cv::Mat>& rvecs, const std::vector<cv::Mat>& tvecs,
const std::vector<float>& reprojErrs,
const std::vector<std::vector<cv::Point2f> >& imagePoints,
double totalAvgErr,double rms )
{
cv::FileStorage fs( filename, cv::FileStorage::WRITE );
time_t tt;
time( &tt );
struct tm *t2 = localtime( &tt );
char buf[1024];
strftime( buf, sizeof(buf)-1, "%c", t2 );
fs << "calibration_time" << buf;
if( !rvecs.empty() || !reprojErrs.empty() )
fs << "nframes" << (int)std::max(rvecs.size(), reprojErrs.size());
fs << "image_width" << imageSize.width;
fs << "image_height" << imageSize.height;
fs << "board_width" << boardSize.width;
fs << "board_height" << boardSize.height;
fs << "square_size" << squareSize;
/*if( flags & cv::CALIB_FIX_ASPECT_RATIO )
fs << "aspectRatio" << aspectRatio;*/
if( flags != 0 )
{
sprintf( buf, "flags: %s%s%s%s",
flags & cv::CALIB_USE_INTRINSIC_GUESS ? "+use_intrinsic_guess" : "",
flags & cv::CALIB_FIX_ASPECT_RATIO ? "+fix_aspectRatio" : "",
flags & cv::CALIB_FIX_PRINCIPAL_POINT ? "+fix_principal_point" : "",
flags & cv::CALIB_ZERO_TANGENT_DIST ? "+zero_tangent_dist" : "" );
cvWriteComment( *fs, buf, 0 );
}
fs << "flags" << flags;
fs << "camera_matrix" << cameraMatrix;
fs << "distortion_coefficients" << distCoeffs;
fs << "avg_reprojection_error" << totalAvgErr;
fs << "avg_reprojection_error" << rms;
if( !reprojErrs.empty() )
fs << "per_view_reprojection_errors" << cv::Mat(reprojErrs);
if( !rvecs.empty() && !tvecs.empty() )
{
CV_Assert(rvecs[0].type() == tvecs[0].type());
cv::Mat bigmat((int)rvecs.size(), 6, rvecs[0].type());
for( int i = 0; i < (int)rvecs.size(); i++ )
{
cv::Mat r = bigmat(cv::Range(i, i+1), cv::Range(0,3));
cv::Mat t = bigmat(cv::Range(i, i+1), cv::Range(3,6));
CV_Assert(rvecs[i].rows == 3 && rvecs[i].cols == 1);
CV_Assert(tvecs[i].rows == 3 && tvecs[i].cols == 1);
//*.t() is MatExpr (not Mat) so we can use assignment operator
r = rvecs[i].t();
t = tvecs[i].t();
}
cvWriteComment( *fs, "a set of 6-tuples (rotation vector + translation vector) for each view", 0 );
fs << "extrinsic_parameters" << bigmat;
}
if( !imagePoints.empty() )
{
cv::Mat imagePtMat((int)imagePoints.size(), (int)imagePoints[0].size(), CV_32FC2);
for( int i = 0; i < (int)imagePoints.size(); i++ )
{
cv::Mat r = imagePtMat.row(i).reshape(2, imagePtMat.cols);
cv::Mat imgpti(imagePoints[i]);
imgpti.copyTo(r);
}
fs << "image_points" << imagePtMat;
}
}
static bool readStringList( const std::string& filename, std::vector<std::string>& l )
{
l.resize(0);
cv::FileStorage fs(filename, cv::FileStorage::READ);
if( !fs.isOpened() )
return false;
cv::FileNode n = fs.getFirstTopLevelNode();
if( n.type() != cv::FileNode::SEQ )
return false;
cv::FileNodeIterator it = n.begin(), it_end = n.end();
for( ; it != it_end; ++it )
l.push_back((std::string)*it);
return true;
}
static bool runAndSave(const std::string& outputFilename,
const std::vector<std::vector<cv::Point2f> >& imagePoints,
cv::Size imageSize, cv::Size boardSize, /*Pattern patternType,*/ float squareSize,
/*float aspectRatio, */int flags, cv::Mat& cameraMatrix,
cv::Mat& distCoeffs, bool writeExtrinsics, bool writePoints )
{
std::vector<cv::Mat> rvecs, tvecs;
std::vector<float> reprojErrs;
double totalAvgErr = 0;
double rms=0;
bool ok = runCalibration(imagePoints, imageSize, boardSize, /*patternType,*/ squareSize,
/*aspectRatio,*/ flags, cameraMatrix, distCoeffs,
rvecs, tvecs, reprojErrs, totalAvgErr,rms);
printf("%s. avg reprojection error = %.2f\n",
ok ? "Calibration succeeded" : "Calibration failed",
totalAvgErr);
for (int j=0;j<tvecs.size();j++)
{
std::cout<<j<<std::endl;
std::cout<<tvecs[j]<<std::endl<<std::endl;
}
if( ok )
saveCameraParams( outputFilename, imageSize,
boardSize, squareSize, /*aspectRatio,*/
flags, cameraMatrix, distCoeffs,
writeExtrinsics ? rvecs : std::vector<cv::Mat>(),
writeExtrinsics ? tvecs : std::vector<cv::Mat>(),
writeExtrinsics ? reprojErrs : std::vector<float>(),
writePoints ? imagePoints : std::vector<std::vector<cv::Point2f> >(),
totalAvgErr,rms );
return ok;
}
static bool calibPicFilter(const std::string& outputFilePath,
const std::string& inputFilename,std::vector<std::string>& imageList,
cv::Size boardSize,std::vector<std::vector<cv::Point2f>>& imagePoints)
{
//获取原图列表
readStringList(inputFilename, imageList);
for(int i = 0;i<imageList.size();i++)
{
cv::Mat view, viewGray;
view = cv::imread(imageList[i], 1);
cout << imageList[i] << endl;
if (view.empty())
cout << "fail" << endl;
std::vector<cv::Point2f> pointbuf;
if(view.channels()==3)
cvtColor(view, viewGray, cv::COLOR_BGR2GRAY);//彩色图转灰度图
//角点提取
bool found=false;
found = findChessboardCorners( view, boardSize, pointbuf,cv::CALIB_CB_ADAPTIVE_THRESH | cv::CALIB_CB_FAST_CHECK | cv::CALIB_CB_NORMALIZE_IMAGE);
// 亚像素精确化,提高角点的精度
if( found)
{
//把图像存储出来
cv::cornerSubPix( viewGray, pointbuf, cv::Size(11,11),cv::Size(-1,-1), cv::TermCriteria( cv::TermCriteria::EPS+cv::TermCriteria::COUNT, 30, 0.001 ));
//cv::find4QuadCornerSubpix(viewGray,pointbuf,cv::Size(11,11));
imagePoints.push_back(pointbuf);
drawChessboardCorners( view, boardSize, cv::Mat(pointbuf), found );//绘制角点
//把图像存储出来
std::string::size_type ipos=imageList[i].find_last_of("\\")+1;
std::string img_name=imageList[i].substr(ipos,imageList[i].length()-ipos);
std::string img_path=outputFilePath+"\\"+img_name;
cv::imwrite(img_path,view);
}
}
return true;
}
int main( int argc, char** argv )
{
cv::Size boardSize(7,5), imageSize(640,480);
float squareSize=2.0/*, aspectRatio*/;
cv::Mat cameraMatrix, distCoeffs;
std::string outputFilename="out_camera_data.yml";
std::string inputFilename = "C:\\Users\\Administrator\\Desktop\\标定\\calibpic20190612\\OriginalPic\\in.xml";//源图片
std::string outputPath="..\\filterPic";//筛选出的图片
std::string outputImageListPath="out_image_list.xml";//筛选出的图片
bool writeExtrinsics=true, writePoints=true;
bool undistortImage = false;
int flags = 0;
std::vector<std::vector<cv::Point2f> > imagePoints;
std::vector<std::string> imageList;
calibPicFilter(outputPath,inputFilename,imageList,boardSize,imagePoints);
if( imagePoints.size() > 0 )
{
runAndSave(outputFilename, imagePoints, imageSize,
boardSize, /*pattern,*/ squareSize,/* aspectRatio,*/
flags, cameraMatrix, distCoeffs,
writeExtrinsics, writePoints);
}
cv::FileStorage fs( outputImageListPath, cv::FileStorage::WRITE );
fs<<"imageList"<<"[";
fs<<imageList<<"]";
waitKey(0);
getchar();
return 0;
}
所在目录:
in.xml文件:
输出的ymal:

使用ymal矫正:
//https://blog.csdn.net/lonelyrains/article/details/46915705
#include "opencv2/opencv.hpp"
#include <string>
#include <iostream>
using namespace cv;
using namespace std;
void loadCameraParams(Mat &cameraMatrix, Mat &distCoeffs)
{
FileStorage fs("out_camera_data.yaml", FileStorage::READ);
fs["camera_matrix"] >> cameraMatrix;
fs["distortion_coefficients"] >> distCoeffs;
}
int main()
{
//VideoCapture inputVideo(1);
//inputVideo.set(CV_CAP_PROP_FRAME_WIDTH, 800);
//inputVideo.set(CV_CAP_PROP_FRAME_HEIGHT, 600);
//if (!inputVideo.isOpened())
//{
// cout << "Could not open the input video: " << endl;
// return -1;
//}
Mat frame;
Mat frameCalibration;
frame = imread("20190611142018179.bmp");
//inputVideo >> frame;
Mat cameraMatrix = Mat::zeros(3, 3, CV_64F);
cameraMatrix.at<double>(0, 0) = 8.3164290667548016e+02;
cameraMatrix.at<double>(0, 2) = 2.5621626434287748e+02;
cameraMatrix.at<double>(1, 1) = 8.2630998852990399e+02;
cameraMatrix.at<double>(1, 2) = 2.4107615207676179e+02;
cameraMatrix.at<double>(2, 2) = 1;
Mat distCoeffs = Mat::zeros(5, 1, CV_64F);
distCoeffs.at<double>(0, 0) = 1.7627063064507345e-01;
distCoeffs.at<double>(1, 0) = 9.9790853885603562e-02;
distCoeffs.at<double>(2, 0) = 5.9408661598010027e-03;
distCoeffs.at<double>(3, 0) = -1.9576300812006838e-02;
distCoeffs.at<double>(4, 0) = -2.6739120660575884e+00;
//loadCameraParams(cameraMatrix, distCoeffs);
Mat view, rview, map1, map2;
Size imageSize;
imageSize = frame.size();
initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(),
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0),
imageSize, CV_16SC2, map1, map2);
remap(frame, frameCalibration, map1, map2, INTER_LINEAR);
imshow("Origianl", frame);
imshow("Calibration", frameCalibration);
waitKey(0);
return 0;
}


















 4577
4577

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











