






1、4D 毫米波雷达产品特征及应用前景分析
1.1 4D 毫米波雷达的功能与特征
4D毫米波雷达在3D毫米波雷达检测目标3D信息(雷达与目标的距离、相对径向速度、水平角度的数据)的基础上,增加对目标高度(垂直角度)的估计,相比于3D毫米波雷达具有天线数量多且密度高、输出的点云图像密度更高等特征点。
4D毫米波雷达在距离分辨率、距离精度、角度分辨率、角度精度、速度分辨率和速度精度等方面都有所提升,尤其是在角度分辨率上,目前角度超分辨算法成为了4D毫米波成像雷达的核心竞争力之一!
4D毫米波雷达与3D毫米波雷达相比的优势如下所示:
(1) 高识别度:更有效”描绘“目标的轮廓,识别目标的类别和行为。更进一步,可识别较小或部分被遮挡以及静止物体或横向运动的目标。
(2)高灵敏度:高度信息的增加可滤除部分误制动的虚警,可避免漏刹车或者误刹车。
(3) 高动态范围:可区分大致同向、大致同距以及大致同速的强弱目标。
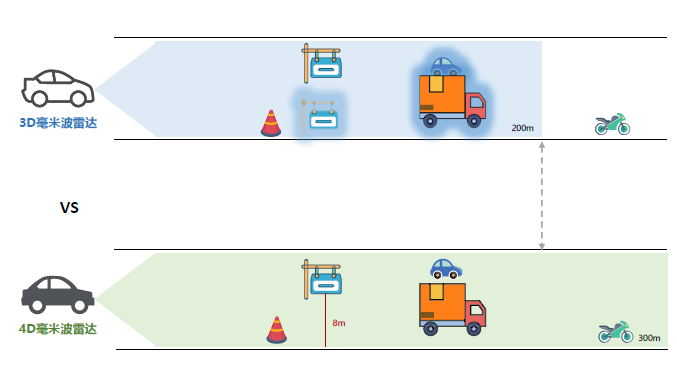
(4) 具备更远的探测距离:探测距离将提高到300米以上。
1.2 4D毫米波雷达与其他传感器对比分析
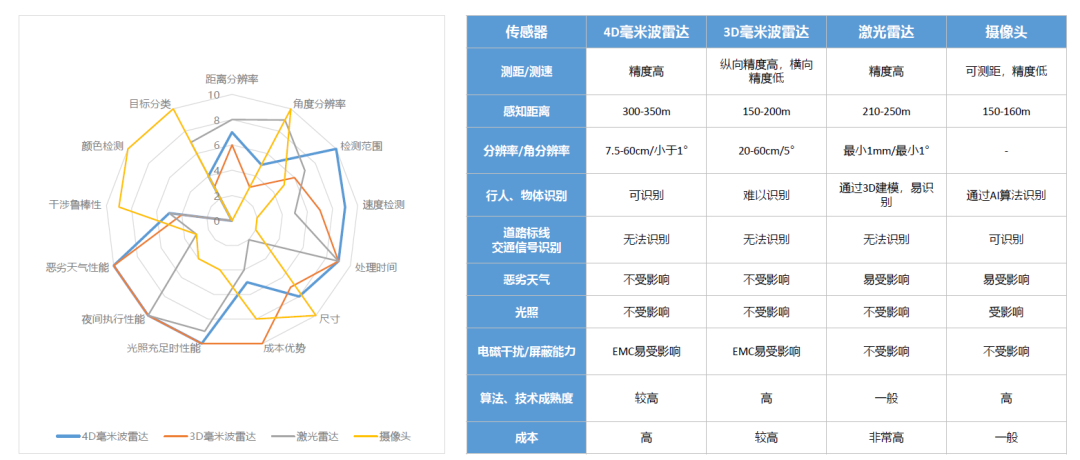
纵向上看,4D毫米波雷达相比于3D毫米波雷达在多项性能上表现更强 ,但成本较高 ,且目前量产验证较少,仅有少量头部雷达企业量产上车。横向上看,4D毫米波雷达相比于其他传感器不仅具有毫米波雷达的传统优缺点 ,而增强了对物体与行人的识别能力 。
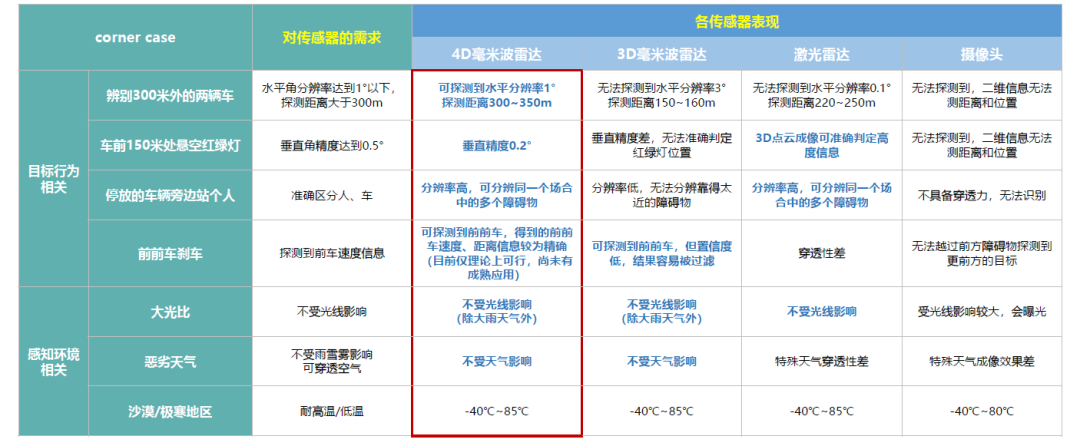
4D毫米波雷达能对普通场景中的目标信息进行更高性能的检测 ,普通场景的覆盖率和处理能力相较于3D毫米波雷达有所提高;同时,4D毫米波雷达在前前车刹车 ,防止连续追尾以及大光比 、恶劣天气等 corner case 场景下能够保持较好的性能。
1.3 4D 毫米波雷达应用前景分析
1.3.1 对比3D 毫米波雷达
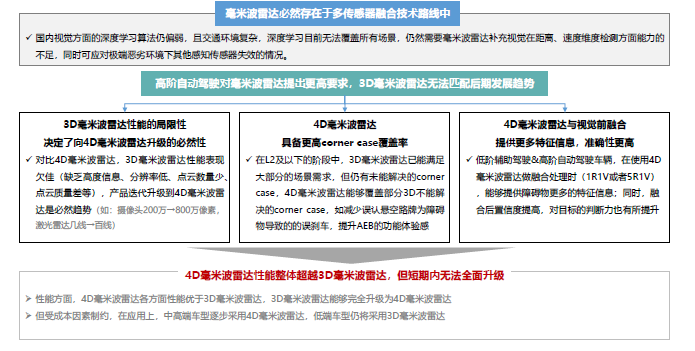
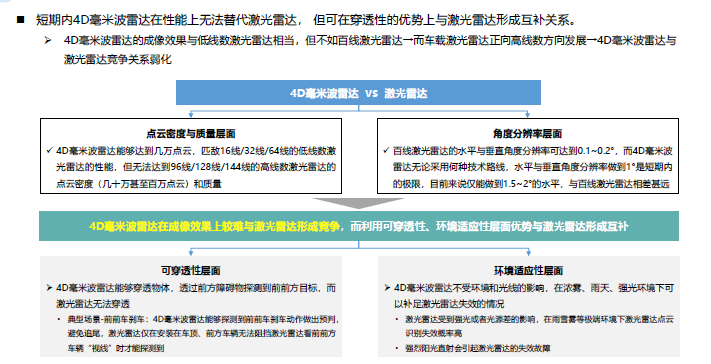
1.3.2 对比激光雷达
2、4D毫米波雷达技术发展趋势分析
2.1 4D毫米波雷达技术趋势总览
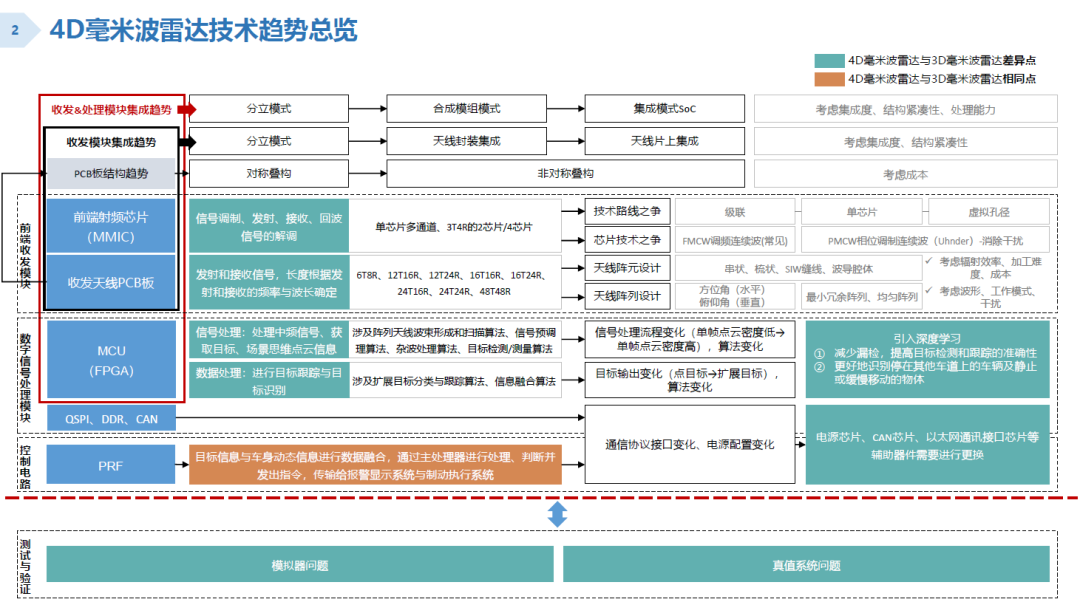
下图是4D毫米波雷达研发所涉及到的技术详细分类,主要分为四大模块:前端射频模块、数字信号处理模块、控制电路、测试与验证。每个模块下面又细分了很多子模块,共同构建了汽车雷达的技术栈。
2.2 4D毫米波雷达波形设计与对比分析
根据辐射电磁波方式不同 ,毫米波雷达主要分为 脉冲体制 以及 连续波体制 两种工作体制 。
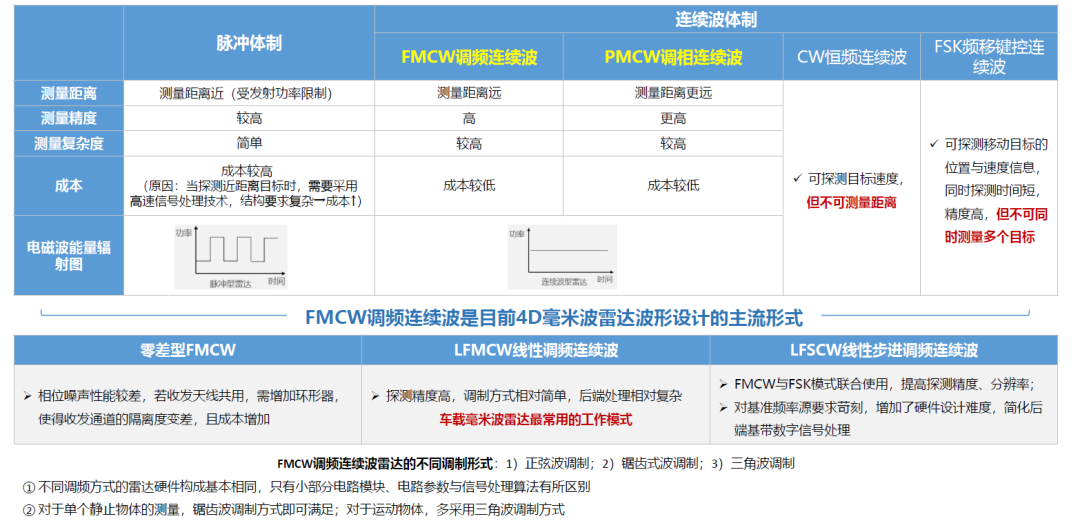
对于单个静止物体测量,锯齿波即可满足要求,对于运动物体,多采用三角波调制方式。之前,在暗室测量大陆548雷达的发射波形时,发现调频波形有上有下,斜率有正负,我猜测可能是采用的三角波调制(只是猜测,没有证据)。
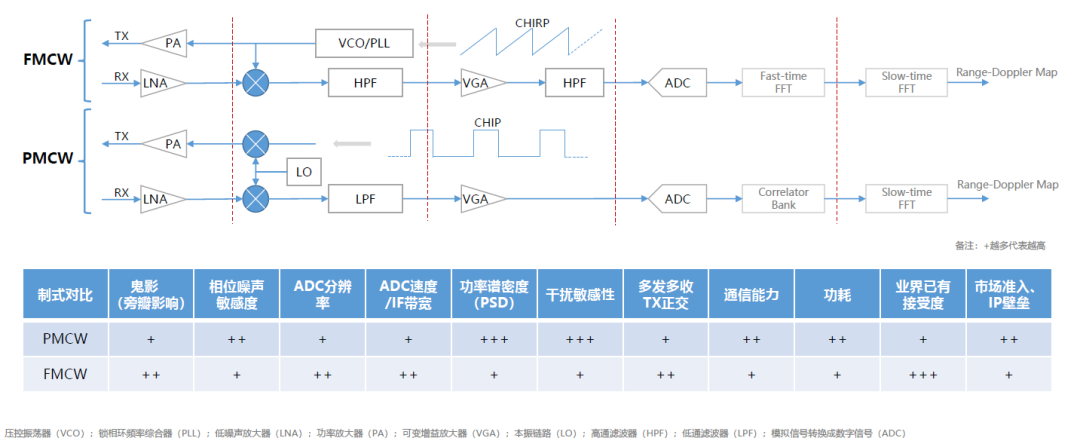
PMCW (调相连续波方案 )通过多天线同时发射正交相位编码信号的方式来探测目标的距离和速度 ,PMCW方案不仅可以探测更远距离 (有效探测距离可达 500m左右 ) ,同时可以有效抑制雷达与雷达之间的相互干扰 , 4D毫米波雷达形设计中 ,PMCW(调相连续波方案 )逐渐崭露头角 ,其代表雷达芯片企业是美国的Uhnder。
2.3 4D毫米波雷达天线阵元设计趋势分析
多片级联雷达收发天线大幅增加,若仍采用微带设计思路馈走和复杂度变阵列只能在 x-y方向上布局, 导致雷达面积过大罗杰斯板材使用面积也会变大,成本显著增加;采用波导腔体天线,阵列布局可沿 z方向延伸,相比于微带天线,可以明显减小雷达面积和体积。
因此,多芯片级联技术方案中,波导腔体天线将成为天线阵元设计的趋势,这个非常值得关注。
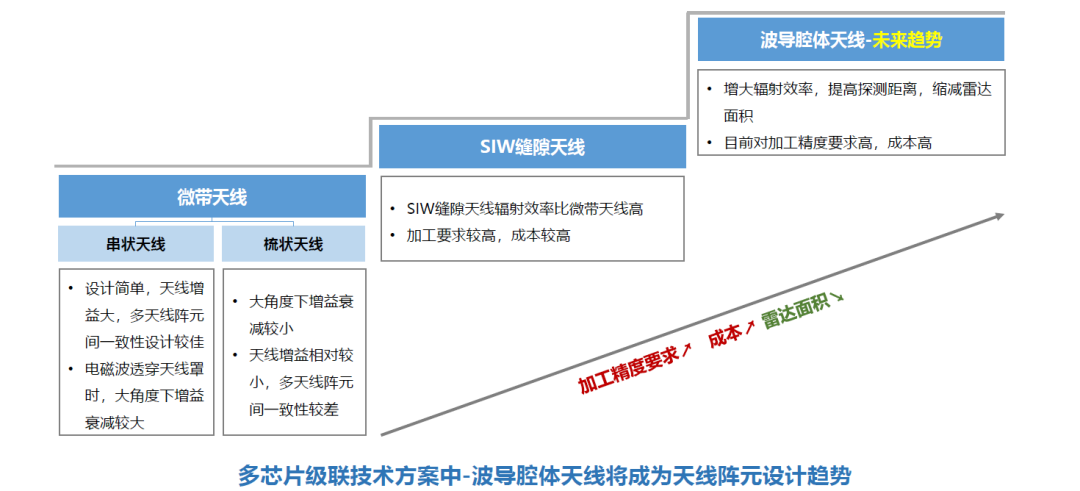
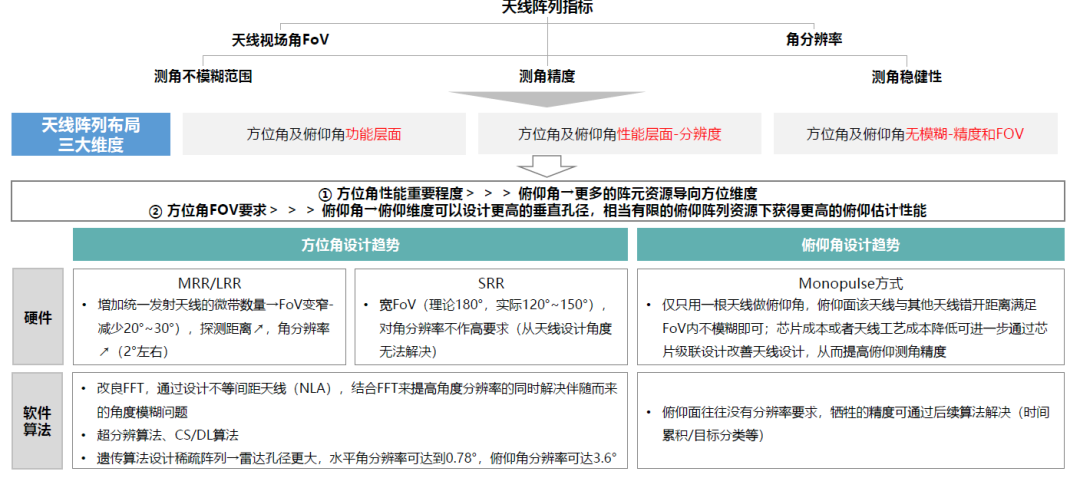
4D毫米波雷达比3D毫米波雷达增加俯仰角信息 ,天线阵列设计更为复杂 ,通常是指标间相互制约(比如角度分辨率与角度模糊) ,且与波形设计 、硬件设计 、制造工艺密切相关 。
2.4 4D毫米波雷达信号处理框架变化趋势分析
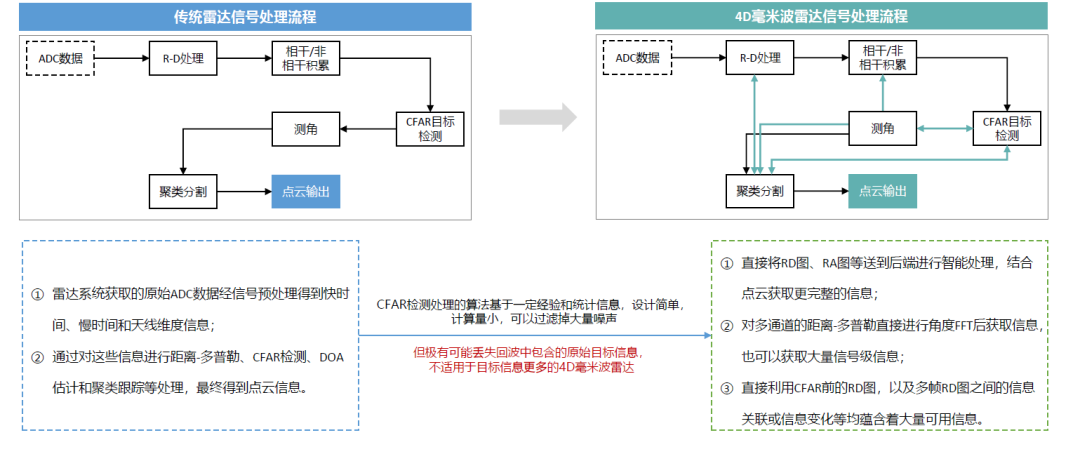
雷达信号处理最核心工作:依次完成径向距离、径向速度 、方位角的估计问题 (在满足一定条件下都可等价为各自独立频率的估计问题,即线性运算 ),常见的处理架构是 range-Doppler-Angle 或range-Angle-Doppler。但是,4D毫米波雷达引入高度信息 、芯片级联 →信号处理框架更加丰富 (FFT 增加 ),需基于应用场景选择合适的处理框架 。如下图所示:
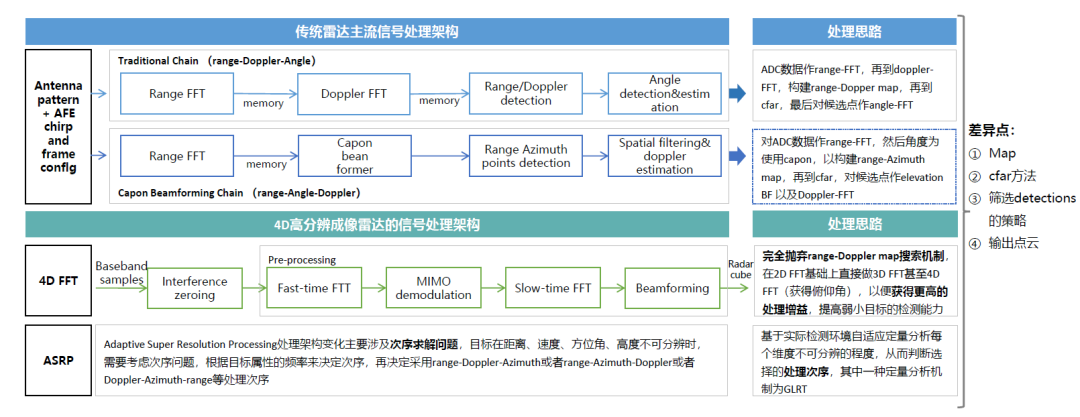
4D毫米波雷达信号处理方案设计以扩展目标为最终结果 ,而传统雷达信号处理流程中检测和测角模块是以假设目标为点目标进行设计的 ,传统流程无法实现单帧高密度点云 ,需采用全新的雷达信号处理算法流程 ,其中相干 /非相干积累 、 目标检测 、测角等模块的算法与传统算法存在差异 。
本部分内容来自于[九章智驾]报告整理,内容非常有价值,由于篇幅太多,后续内容暂不展开,高清无水印版,请在【公众号分享资料清单】中下载。
公众号所有分享的资料都在这个清单中,请周知!
https://docs.qq.com/sheet/DT0RrZGJ6ZlRRc2tm?tab=BB08J2


















 1243
1243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











