







成就更好的自己
ROS无人机快速上手指南旨在于让使用此无人机开发平台的比赛参赛人员,算法设计人员,无人机爱好者更加快速的了解底层控制运作原理,从而缩短开发周期,减少掉坑次数,快速验证算法的速度,不用在某些底层问题上花费大量时间。
使用此指南的人员需要具备如下能力:
- 熟练使用Ubuntu操作系统;
- 掌握一定的ROS系统的基础知识;
- 熟练使用C++并了解编译原理;
- 熟练使用Python和安装Python库;
- 熟练使用或了解JetsonNano或树莓派等微型计算机;
- 了解无人机飞行常识性知识;
- 能够稳定的,安全的“科学上网”;
- 自主解决问题的能力和耐心
本指南主要内容与章节安排如下:
- 无人机硬件系统概述与指南简介;
- Jetson特供版Ubuntu18.04系统及ROS环境讲解;
- ROS环境下工作环境文件框架与各功能包整体讲解(重点章节);
- 基于AMOV(阿木)PX4功能包的飞行控制分析与讲解(重点章节);
- 基于此平台快速部署与验证某算法的操作思路;
限于本人能力有限,制作时间仓促,本指南如有错误,疑问,侵权等,请联系:
微信二维码:

目录
硬件平台概述:
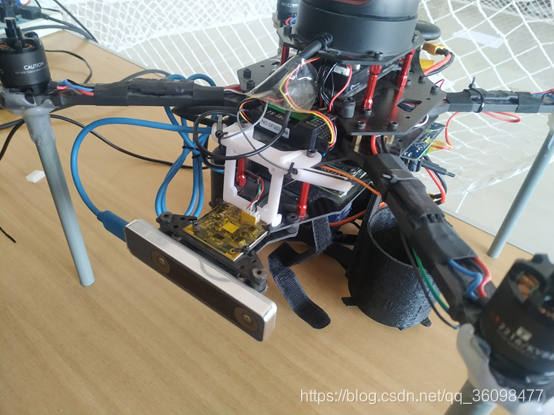

ROS无人机快速上手指南的硬件平台基于:
- Jetson Nano微型计算机为数据处理中心
- Pixhawk4自动驾驶仪为飞行姿态控制器
- 思岚科技RPLIDAR-A2激光雷达作为激光Lidar传感器
- Intel公司RealSenseTMT265追踪相机作为世界坐标系下位姿数据传感器
- USB单目摄像头作为图像采集
Jetson Nano
主要特点:

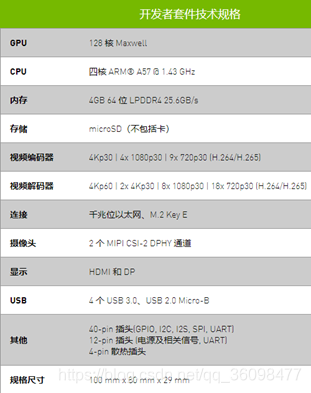
- 40个GPIO口,自带UART,IIC,SPI便于控制;
- 带有GPU单元,运行基于darknet的YOLOv3算法帧数可达到10FPS~15FPS;
- 供电5V,4A(低性能)~6A(高性能)即可满足高性能运行下的电源需求;
主要坑点:
- GPIO无法输出稳定纯净的PWM波形,建议使用PCA9685模块(IIC转16路PWM);
- 高负荷运行下散热片压不住热量,总是导致过热重启,单独使用时应加散热风扇;
更多信息见文末链接;
Pixhawk4自驾仪
主要特点:
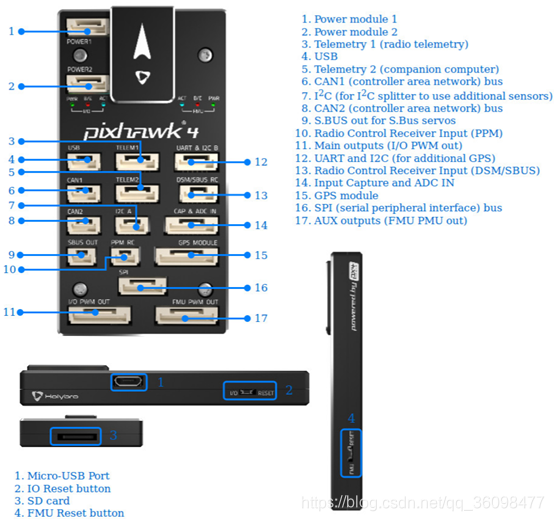
- Pixhawk4被誉为开源飞控之王,使用用户广泛,性能稳定,产品生态良好;
- 本身支持软硬件在环仿真,兼容Gazebo和ROS环境;
- 配套地面站使用QGroundControl,分别支持windows和ubuntu系统;
飞行控制常识,地面站使用方法等更多信息见文末链接;
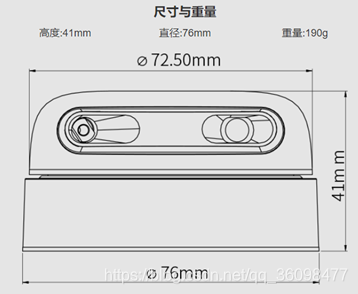
Intel RealSenseT265追踪相机
主要特点:

- 产品可以直接对接ROS系统,官方的功能包可以直接使用;
- 精度误差低,一般使用完全没问题;
- 尺寸质量轻便,功耗低
主要坑点:
- 相机定位实现原理是计算特征点,因此在有大量动态物体或纯净背景的情况下不能使用;
- 光强度适宜,黑暗或强光直射情况下不能使用;
- 根据实测,无人机在距地面5cm左右的位置跌落会损失大量z轴(右手坐标系)精度,需要加橡皮减震塞减少震动,并且减少无人机降落的次数;
更多信息与相机测评见文末链接;
思岚科技RPLIDAR-A2激光雷达

这个没啥说的,思岚科技给的有ROS的官方例程;
更多信息见文末链接;
链接及资料
Jetson Nano官网链接:
https://www.nvidia.cn/autonomous-machines/embedded-systems/jetson-nano/product-development/
Pixhawk4官方用户使用指南(英文版):
https://docs.px4.io/master/en/getting_started/
Pixhawk4官方用户使用指南(中文版翻译不全):
https://docs.px4.io/master/zh/config/firmware.html
Intel RealSenseT265追踪相机官网:
https://www.intelrealsense.com/zh-hans/tracking-camera-t265/
Intel RealSenseT265追踪相机官方参数数据手册:
Intel RealSenseT265追踪相机精度测评:
https://www.youtube.com/watch?v=GhHvuAoFC6I
思岚科技RPLIDAR-A2激光雷达产品:
https://www.slamtec.com/cn/Lidar/A2Spec
思岚科技RPLIDAR-A2激光雷达数据手册与例程:
https://www.slamtec.com/cn/Support#rplidar-a-series

















 2087
2087

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









