






引言
随着无人机技术的快速发展,低空物流网络逐渐成为未来城市物流的重要方式之一。在城市环境中,无人机物流的优势在于高效、灵活和低成本。然而,这种新型物流模式也面临着诸多挑战,例如复杂的城市环境、空域管理、能源限制以及天气影响等问题。
本篇博客将详细介绍如何通过仿真技术构建一个逼真的低空物流网络多场景仿真系统,以支持无人机路径规划、任务调度和网络优化的研究。示例代码使用 Python 实现,涵盖了城市环境建模、无人机定义与调度、路径规划算法和多场景仿真等模块。
一、低空物流仿真研究的核心问题
-
复杂的城市环境
城市建筑密集,飞行路径需要避开禁飞区(如机场、政府机构等),还要满足高度限制要求。此外,人口密度和需求分布也会影响无人机的任务规划。 -
多变的运行场景
无人机物流运行可能受到各种动态因素的影响,如高峰期的任务爆发、恶劣天气的性能下降以及突发需求(如应急医疗物资运输)。 -
资源与能效限制
无人机的电池续航能力有限,在路径规划和任务分配时需要兼顾任务完成率和能耗优化。 -
空域管理与冲突避免
多无人机协作需要有效避免飞行冲突,并提高任务完成的效率。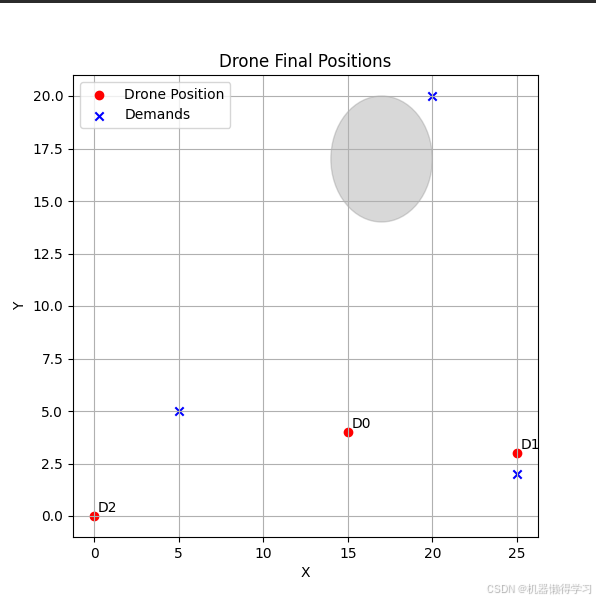
二、仿真系统的技术架构
我们将构建一个包含以下核心模块的仿真系统:
-
城市环境模拟
包括建筑分布、需求点、禁飞区和天气模拟。真实场景中可通过 GIS 数据或数字孪生技术获取更精确的环境信息。 -
无人机定义与调度
定义无人机的飞行速度、载荷能力、电池续航等性能,开发多无人机任务分配和调度算法。 -
路径规划算法
使用图算法(如 Dijkstra、A*)或强化学习进行最优路径规划,解决动态环境下的路径问题。 -
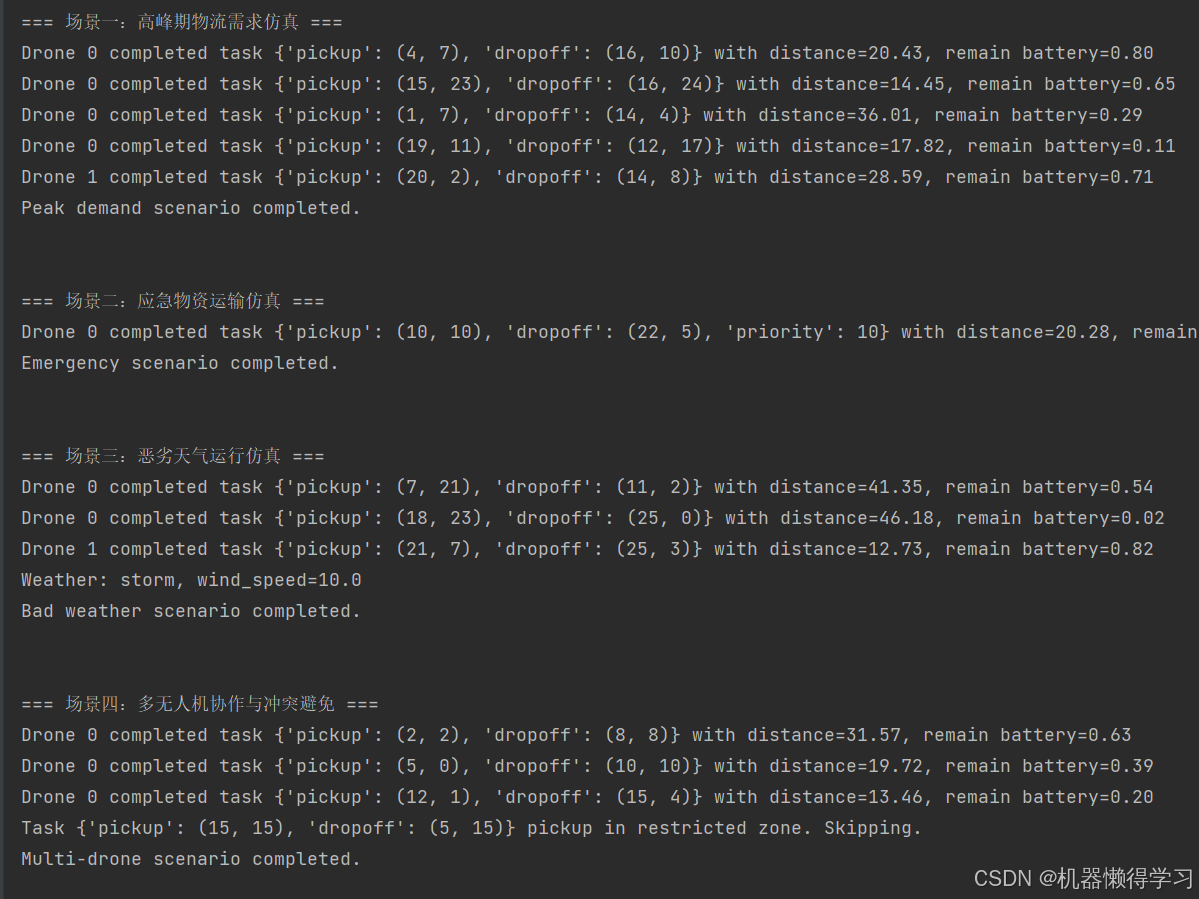
多场景仿真
包括高峰期物流需求、恶劣天气运行、应急物资运输以及多无人机协作。
三、系统实现与示例
以下是系统实现的关键内容:
1. 城市环境模拟
城市环境模拟通过一个 CityEnvironment 类来完成。该类加载城市数据并提供天气状况、禁飞区检查等功能。以下是一个简单的实现示例:
class CityEnvironment:
def __init__(self, city_data=None):
self.city_data = city_data or self._default_city_data()
self.weather = "sunny"
self.wind_speed = 0.0
def _default_city_data(self):
return {
"buildings": [(10, 10), (12, 14)],
"demands": [(5, 5), (20, 20)],
"restricted_areas": [(15, 15)],
}
def is_restricted(self, x, y):
for rx, ry in self.city_data["restricted_areas"]:
if (x - rx)**2 + (y - ry)**2 < 9: # 禁飞区半径3
return True
return False
2. 无人机定义与管理
无人机的调度通过 DroneManager 管理多个无人机的状态,并分配任务:
class Drone:
def __init__(self, drone_id):
self.id = drone_id
self.position = (0, 0)
self.battery = 1.0 # 电池满电
def move_to(self, new_position):
self.position = new_position
class DroneManager:
def __init__(self, num_drones):
self.drones = [Drone(i) for i in range(num_drones)]
def get_available_drone(self):
for drone in self.drones:
if drone.battery > 0.2: # 只分配电量充足的无人机
return drone
return None
3. 路径规划算法
路径规划采用图搜索算法,以下是基于 NetworkX 的 Dijkstra 实现:
import networkx as nx
class PathPlanner:
def __init__(self):
self.graph = nx.Graph()
def add_edge(self, start, end, weight):
self.graph.add_edge(start, end, weight=weight)
def find_shortest_path(self, start, goal):
return nx.dijkstra_path(self.graph, source=start, target=goal)
4. 多场景仿真
以高峰期物流需求为例,通过随机生成任务并进行调度仿真:
def simulate_peak_demand(city_env, drone_manager, path_planner):
tasks = [{'pickup': (5, 5), 'dropoff': (20, 20)} for _ in range(5)]
for task in tasks:
drone = drone_manager.get_available_drone()
if drone:
path = path_planner.find_shortest_path(drone.position, task['pickup'])
print(f"Drone {drone.id} task path: {path}")
 四、运行结果与优化分析
四、运行结果与优化分析
-
路径效率
不同路径规划算法对任务完成时间和能耗有显著影响。在简单城市环境中,Dijkstra 和 A* 的表现差异不大,但在复杂场景下 A* 的启发式搜索更具优势。 -
多无人机协作
多无人机协作可以显著提升任务完成效率,但需要通过冲突检测算法避免路径交叉带来的风险。 -
天气影响
恶劣天气(如强风、高降雨)会显著增加能耗,并降低任务完成率,因此需要动态调整任务优先级。 -
优化策略
- 引入强化学习算法优化调度。
- 动态调整任务优先级,确保重要任务优先完成。
- 设计充电站部署策略,提升无人机续航能力。
五、未来展望
低空物流网络的仿真研究为无人机物流的实际应用提供了重要参考。未来研究方向包括:
- 结合真实 GIS 数据和城市模型,构建高保真的数字孪生城市环境。
- 开发更智能的路径规划和调度算法,如深度强化学习或元启发式算法。
- 研究多无人机协作的空域管理和冲突避免机制。
- 评估低空物流对城市环境(噪声、空气质量等)的长期影响。
通过不断优化仿真技术和算法,低空物流将更好地服务于未来智慧城市的建设。

















 1303
1303

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









