







在本文中,我们将探讨不同类型的 AI 代理,包括它们的实现、实际应用、优势和局限性。从简单反射代理到多代理系统,我们将了解这些模型如何推动自动化、决策制定和智能问题解决。
文章目录
让我们开始吧!
1. AI代理的类型
根据 AI 代理的行为如何影响其感知的智能和能力,可以将 AI 代理分为以下几类:
- 简单反射代理
- 基于模型的代理
- 基于目标的代理
- 基于效用的代理
- 学习代理
- 层级代理
- 多代理系统(MAS)
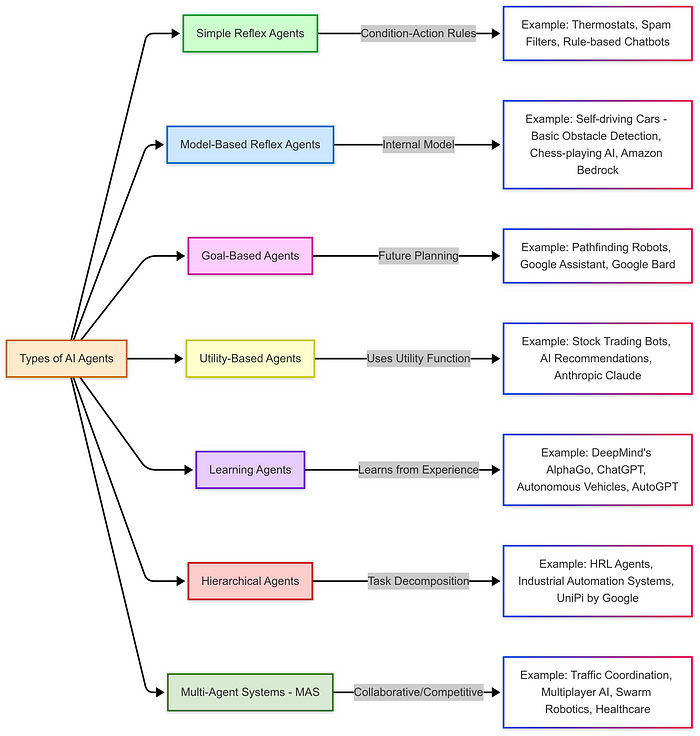
作者提供的图片
通过了解每种类型代理的特性,我们可以提升其性能,生成更好的行为。接下来,我们详细了解一下 AI 代理的类型。
1.1 简单反射代理
简单反射代理仅在发生某种动作或条件时才起作用。这类 AI 代理基于一组预设规则进行响应,做决策时不考虑以往的经验,仅适用于无需策略思考的简单任务。
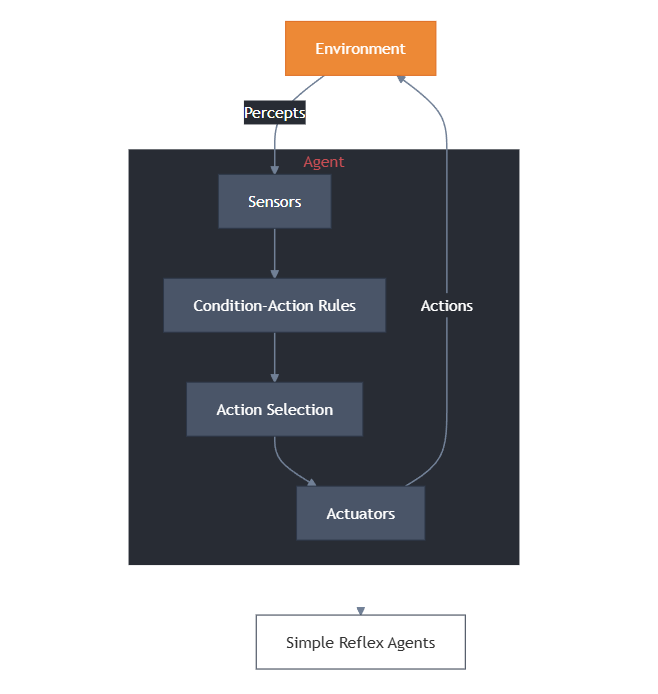
图片来源:Writesonic
1.1.1 实现
class SimpleReflexVacuumAgent:
def __init__(self):
self.location = "A"
self.actions = []
def perceive_and_act(self, current_location, is_dirty):
if is_dirty:
self.actions.append("Suck")
print(f"Cleaned {
current_location}")
else:
if current_location == "A":
self.actions.append("MoveRight")
self.location = "B"
else:
self.actions.append("MoveLeft")
self.location = "A"
print(f"Moved to {
self.location}")
# 执行
agent = SimpleReflexVacuumAgent()
percepts = [("A", True), ("A", False), ("B", True), ("B", False)]
for loc, dirt in percepts:
agent.perceive_and_act(loc, dirt)
这段代码实现了直接的刺激-响应机制,环境感知(房间状态)触发预设的清洁行为。
工作原理:简单反射代理基于条件-动作规则运行,这意味着它们仅对当前输入(感知)做出直接反应,而不考虑以往的经验。这些代理适用于以下环境:
- 完全可观察(代理对状态有完整信息)。
- 确定性(结果可根据动作预测)。
机制:代理遵循预设
规则来确定动作。
- 例如,吸尘清洁代理在两个位置(A 和 B)之间交替,仅在检测到灰尘时进行清洁。
- 由于它完全基于当前条件运行,因此不会保留以往状态或决策的记录。
适用场景:这些代理非常适合简单的、基于规则的任务,决策不需要历史数据。一些常见示例包括:
- 自动化客户服务:基于规则的聊天机器人检测到“重置密码”等关键词时,提供预设的说明。
- 数字恒温器:当温度低于特定阈值时打开加热器。
- 工业自动化:基本的物联网设备对直接输入做出响应,无需复杂的处理。
1.1.2 优势
- 设计和实现简单,仅需极少的计算资源
- 能够实时响应环境变化
- 在传感器提供输入准确且规则设计良好的情况下,高度可靠
- 不需要大量的训练或复杂的硬件
1.1.3 局限性
简单反射代理的局限性如下:
- 适应性:在部分可观察环境中难以适应变化。
- 记忆:无法存储以往的互动记录。
- 学习能力:无法随着时间的推移改进决策制定。
1.2 基于模型的反射代理
基于模型的反射代理扩展了简单反射架构,通过维护内部世界状态表示来处理部分可观察性。基于模型的反射代理根据当前感知和代表不可观察世界的内部状态来执行动作。它根据两个因素更新内部状态:
- 世界独立于代理的演变方式
- 代理的动作如何影响世界
谨慎的基于模型的反射代理是基于模型的反射代理的一个变体,它在执行动作之前还会考虑其动作的可能后果。
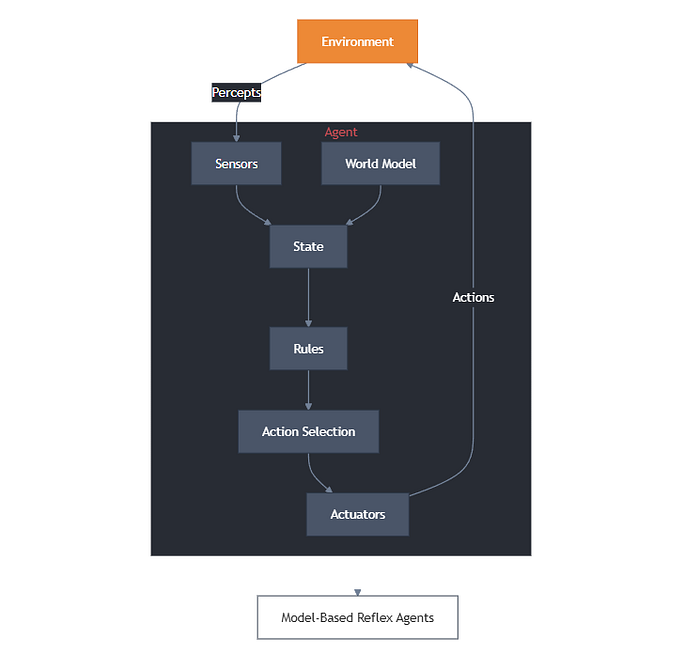
图片来源:Writesonic
1.2.1 实现
class ModelBasedVacuumAgent:
def __init__(self):
self.model = {
"A": "Unknown", "B": "Unknown"} 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 352
352

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











