









👨💻作者简介:大数据专业硕士在读,CSDN人工智能领域博客专家,阿里云专家博主,专注大数据与人工智能知识分享,公众号:GoAI的学习小屋,免费分享书籍、简历、导图等资料,更有交流群分享AI和大数据,加群方式公众号回复“加群”或➡️点击链接。
🎉专栏推荐:➡️点击访问《计算机视觉》:长期更新不限于深度学习、OCR、目标检测、图像分类、分割等方向总结资料。 ➡️点击访问《深入浅出OCR》: 对标全网最全OCR教程。以上目前活动仅29.9,感兴趣小伙伴可关注下。
🎉学习者福利:强烈推荐一个优秀AI学习网站,包括机器学习、深度学习等理论与实战教程,非常适合AI学习者。➡️网站链接。
🎉技术控福利:程序员兼职社区招募!技术范围广,CV、NLP方向均可,要求有一定基础,最好是研究生及以上或有工作经验,欢迎大佬加入!群内Python、c++、Matlab等各类编程语言单应有尽有, 资源靠谱、费用自谈,有意向直接➡️访问。
PyTorch可视化
往期学习资料推荐:
本系列目录:
后续继续更新!!!!
1 可视化网络结构
- 打印模型基础信息:使用
print()函数,只能打印出基础构件的信息,不能显示每一层的shape和对应参数量的大小
import torchvision.models as models
model = models.resnet18()print(model)ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)- 可视化网络结构:使用
torchinfo库进行模型网络的结构输出,可以得到更加详细的信息,包括模块信息(每一层的类型、输出shape和参数量)、模型整体的参数量、模型大小、一次前向或者反向传播需要的内存大小等
import torchvision.models as models
from torchinfo import summary
resnet18 = models.resnet18() # 实例化模型
# 其中batch_size为1,图片的通道数为3,图片的高宽为224
summary(model, (1, 3, 224, 224))==========================================================================================
Layer (type:depth-idx) Output Shape Param #
==========================================================================================
ResNet -- --
├─Conv2d: 1-1 [1, 64, 112, 112] 9,408
├─BatchNorm2d: 1-2 [1, 64, 112, 112] 128
├─ReLU: 1-3 [1, 64, 112, 112] --
├─MaxPool2d: 1-4 [1, 64, 56, 56] --
├─Sequential: 1-5 [1, 64, 56, 56] --
│ └─BasicBlock: 2-1 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-1 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-2 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-3 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-4 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-5 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-6 [1, 64, 56, 56] --
│ └─BasicBlock: 2-2 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-7 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-8 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-9 [1, 64, 56, 56] --
│ │ └─Conv2d: 3-10 [1, 64, 56, 56] 36,864
│ │ └─BatchNorm2d: 3-11 [1, 64, 56, 56] 128
│ │ └─ReLU: 3-12 [1, 64, 56, 56] --
├─Sequential: 1-6 [1, 128, 28, 28] --
│ └─BasicBlock: 2-3 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-13 [1, 128, 28, 28] 73,728
│ │ └─BatchNorm2d: 3-14 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-15 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-16 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-17 [1, 128, 28, 28] 256
│ │ └─Sequential: 3-18 [1, 128, 28, 28] 8,448
│ │ └─ReLU: 3-19 [1, 128, 28, 28] --
│ └─BasicBlock: 2-4 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-20 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-21 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-22 [1, 128, 28, 28] --
│ │ └─Conv2d: 3-23 [1, 128, 28, 28] 147,456
│ │ └─BatchNorm2d: 3-24 [1, 128, 28, 28] 256
│ │ └─ReLU: 3-25 [1, 128, 28, 28] --
├─Sequential: 1-7 [1, 256, 14, 14] --
│ └─BasicBlock: 2-5 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-26 [1, 256, 14, 14] 294,912
│ │ └─BatchNorm2d: 3-27 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-28 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-29 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-30 [1, 256, 14, 14] 512
│ │ └─Sequential: 3-31 [1, 256, 14, 14] 33,280
│ │ └─ReLU: 3-32 [1, 256, 14, 14] --
│ └─BasicBlock: 2-6 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-33 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-34 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-35 [1, 256, 14, 14] --
│ │ └─Conv2d: 3-36 [1, 256, 14, 14] 589,824
│ │ └─BatchNorm2d: 3-37 [1, 256, 14, 14] 512
│ │ └─ReLU: 3-38 [1, 256, 14, 14] --
├─Sequential: 1-8 [1, 512, 7, 7] --
│ └─BasicBlock: 2-7 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-39 [1, 512, 7, 7] 1,179,648
│ │ └─BatchNorm2d: 3-40 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-41 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-42 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-43 [1, 512, 7, 7] 1,024
│ │ └─Sequential: 3-44 [1, 512, 7, 7] 132,096
│ │ └─ReLU: 3-45 [1, 512, 7, 7] --
│ └─BasicBlock: 2-8 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-46 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-47 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-48 [1, 512, 7, 7] --
│ │ └─Conv2d: 3-49 [1, 512, 7, 7] 2,359,296
│ │ └─BatchNorm2d: 3-50 [1, 512, 7, 7] 1,024
│ │ └─ReLU: 3-51 [1, 512, 7, 7] --
├─AdaptiveAvgPool2d: 1-9 [1, 512, 1, 1] --
├─Linear: 1-10 [1, 1000] 513,000
==========================================================================================
Total params: 11,689,512
Trainable params: 11,689,512
Non-trainable params: 0
Total mult-adds (G): 1.81
==========================================================================================
Input size (MB): 0.60
Forward/backward pass size (MB): 39.75
Params size (MB): 46.76
Estimated Total Size (MB): 87.11
==========================================================================================Copy to clipboardErrorCopied2 CNN可视化
- CNN卷积核可视化
model = models.vgg11(pretrained=True)
dict(model.features.named_children()){'0': Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'1': ReLU(inplace=True),
'2': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'3': Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'4': ReLU(inplace=True),
'5': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'6': Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'7': ReLU(inplace=True),
'8': Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'9': ReLU(inplace=True),
'10': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'11': Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'12': ReLU(inplace=True),
'13': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'14': ReLU(inplace=True),
'15': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False),
'16': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'17': ReLU(inplace=True),
'18': Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)),
'19': ReLU(inplace=True),
'20': MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)}import matplotlib.pyplot as plt
conv1 = dict(model.features.named_children())['3']
# 得到第3层的卷积层参数
kernel_set = conv1.weight.detach()
num = len(conv1.weight.detach())
print(kernel_set.shape)
# 该代码仅可视化其中一个维度的卷积核,第3层的卷积核有128*64个
for i in range(0, 1):
i_kernel = kernel_set[i]
plt.figure(figsize=(20, 17))
if (len(i_kernel)) > 1:
for idx, filer in enumerate(i_kernel):
plt.subplot(9, 9, idx+1)
plt.axis('off')
plt.imshow(filer[ :, :].detach(),cmap='bwr')torch.Size([128, 64, 3, 3])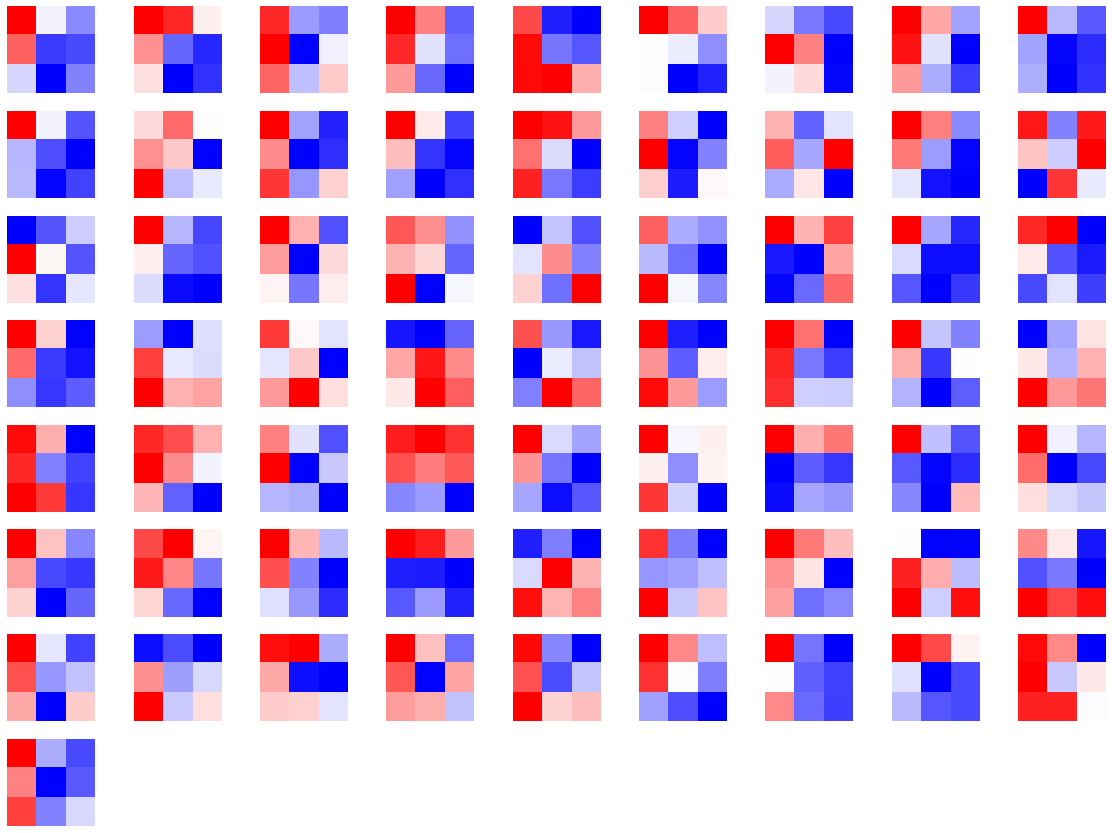
-
CNN特征图可视化:使用PyTorch提供的hook结构,得到网络在前向传播过程中的特征图。
-
CNN class activation map可视化:用于在CNN可视化场景下,判断图像中哪些像素点对预测结果是重要的,可使用
grad-cam库进行操作 -
使用FlashTorch快速实现CNDD可视化:可以使用
flashtorch库,可视化梯度和卷积核
3 使用TensorBoard可视化训练过程
-
可视化基本逻辑:TensorBoard记录模型每一层的feature map、权重和训练loss等,并保存在用户指定的文件夹中,通过网页形式进行可视化展示
-
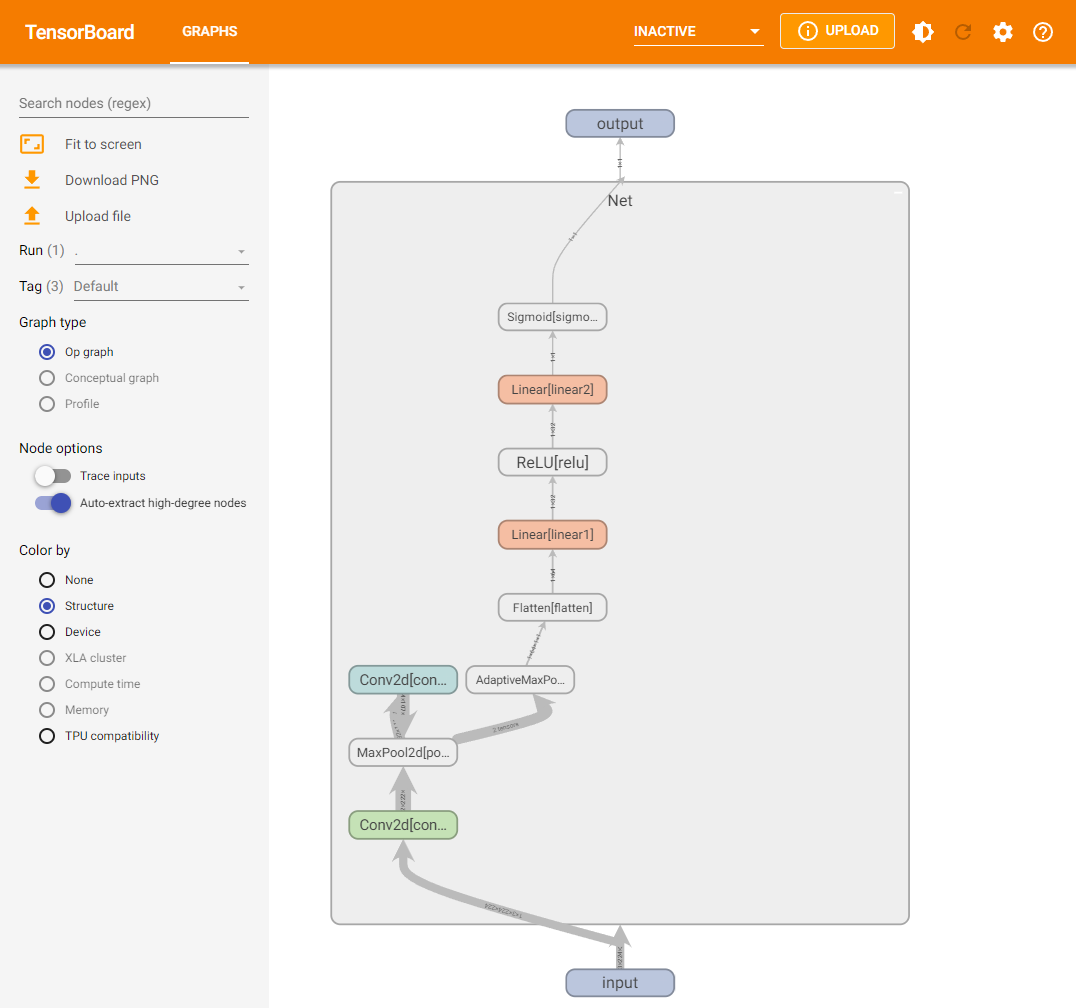
模型结构可视化:使用
add_graph方法,在TensorBoard下展示模型结构
import torch.nn as nn
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(in_channels=3,out_channels=32,kernel_size = 3)
self.pool = nn.MaxPool2d(kernel_size = 2,stride = 2)
self.conv2 = nn.Conv2d(in_channels=32,out_channels=64,kernel_size = 5)
self.adaptive_pool = nn.AdaptiveMaxPool2d((1,1))
self.flatten = nn.Flatten()
self.linear1 = nn.Linear(64,32)
self.relu = nn.ReLU()
self.linear2 = nn.Linear(32,1)
self.sigmoid = nn.Sigmoid()
def forward(self,x):
x = self.conv1(x)
x = self.pool(x)
x = self.conv2(x)
x = self.pool(x)
x = self.adaptive_pool(x)
x = self.flatten(x)
x = self.linear1(x)
x = self.relu(x)
x = self.linear2(x)
y = self.sigmoid(x)
return ymodel = Net() print(model)Net( (conv1): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1)) (pool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (conv2): Conv2d(32, 64, kernel_size=(5, 5), stride=(1, 1)) (adaptive_pool): AdaptiveMaxPool2d(output_size=(1, 1)) (flatten): Flatten(start_dim=1, end_dim=-1) (linear1): Linear(in_features=64, out_features=32, bias=True) (relu): ReLU() (linear2): Linear(in_features=32, out_features=1, bias=True) (sigmoid): Sigmoid() )
from torch.utils.tensorboard import SummaryWriter
writer = SummaryWriter('./runs')
writer.add_graph(model, input_to_model = torch.rand(1, 3, 224, 224))
writer.close()在当前目录下,执行tensorboard --logdir=./runs命令,打开TensorBoard可视化页面,看到模型网络结构。
-
图像可视化:
- 对于单张图片的显示使用
add_image - 对于多张图片的显示使用
add_images - 有时需要使用
torchvision.utils.make_grid将多张图片拼成一张图片后,用writer.add_image显示
- 对于单张图片的显示使用
-
连续变量可视化:使用
add_scalar方法,对连续变量(或时序变量)的变化过程进行可视化展示
for i in range(500):
x = i
y = x ** 2
writer.add_scalar("x", x, i) #日志中记录x在第step i 的值
writer.add_scalar("y", y, i) #日志中记录y在第step i 的值
writer.close()Copy to clipboardErrorCopied- 参数分布可视化:使用
add_histogram方法,对参数(或变量)的分布进行可视化展示
import numpy as np
# 创建正态分布的张量模拟参数矩阵
def norm(mean, std):
t = std * torch.randn((100, 20)) + mean
return t
for step, mean in enumerate(range(-10, 10, 1)):
w = norm(mean, 1)
writer.add_histogram("w", w, step)
writer.flush()
writer.close()Copy to clipboardErrorCopied4 总结
本次任务,主要介绍了PyTorch可视化,包括可视化网络结构、CNN卷积层可视化和使用TensorBoard可视化训练过程。
- 使用
torchinfo库,可视化模型网络结构,展示模块信息(每一层的类型、输出shape和参数量)、模型整体的参数量、模型大小、一次前向或者反向传播需要的内存大小等。 - 使用
grad-cam库,可视化重要像素点,能够快速确定重要区域,进行可解释性分析或模型优化改进。 - 通过
TensorBoard工具,调用相关方法创建训练记录,可视化模型结构、图像、连续变量和参数分布等。

















 991
991











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











