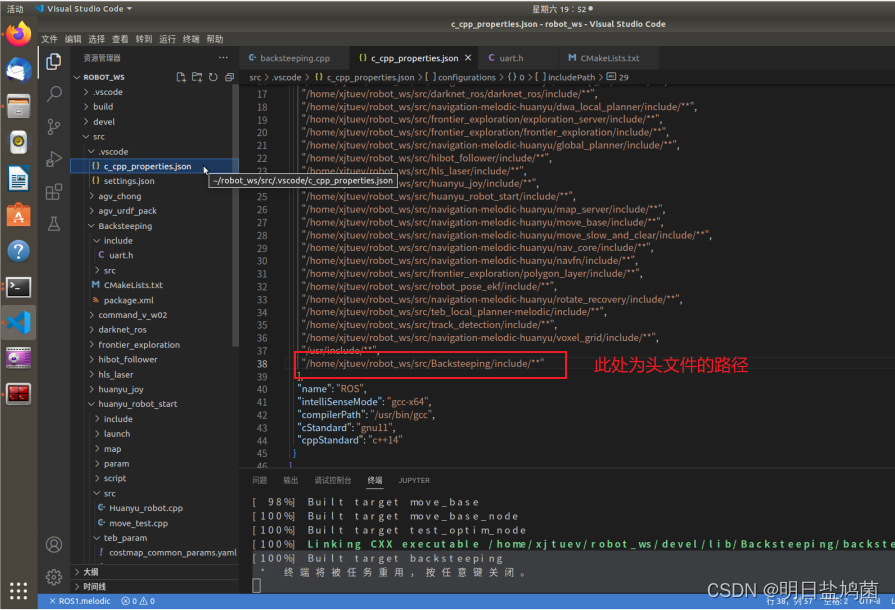
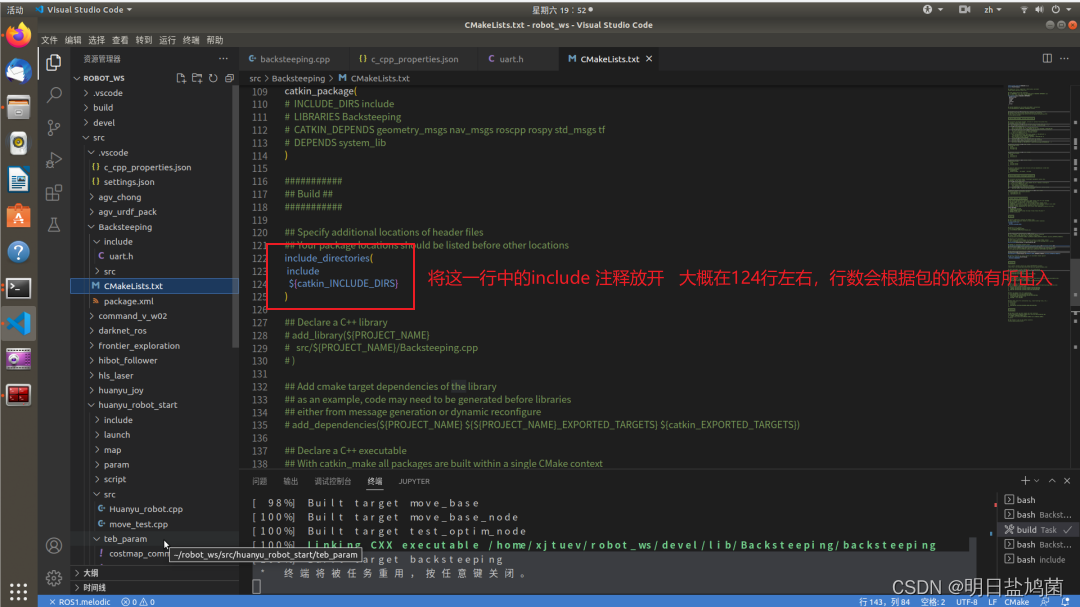
操作步骤 1.在自己的package 下的includ添加并编写自己的头文件 如下图所示 2.配置cmakelist 文件和json文件 1)配置json文件 在json文件中加入路径 可以右击头文件-------->在集成终端中打开------>输入pwd查看文件路径然后将路径复制到json文件中 2)配置cmakelist文件 放开include 注释 3.在cpp文件中添加头文件 直接#iunclude <文件名.h> 不要多余的像ros/ros.h一样

























 3144
3144











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






