









第一篇综述:
Cesar Cadena et al. Past, Present, and Future of Simultaneous Localization and Mapping: Toward the
Robust-Perception Age. 2016 IEEE TRANSACTIONS ON ROBOTICS.
0. 摘要
对SLAM的文献进行了综述。
- 对SLAM的标准数学描述进行了介绍;
- 对SLAM相关工作进行了回顾:鲁棒性,可伸缩性,建图的语义表示,理论性能保证,主动SLAM等。
- 并回答了两个问题:机器人需要SLAM吗?SLAM被解决了吗?
1. 引言
-
SLAM主要任务是进行定位和地图构建。地图的作用:1.路径规划,可视化 2.限定机器人的状态误差(如回环检测)。SLAM的应用场景是其它辅助定位的方式(GPS等)不能使用时。
-
SLAM历史阶段的划分:1.古典时代(滤波器方法,最大概率估计)2.算法分析时代:SLAM的可观察性、收敛性和一致性,求解器的稀疏性(高效求解)。3. 本文认为我们目前正在进入第三阶段:鲁棒感知阶段。
-
本文主要关注度量和语义SLAM。
-
问题回答:
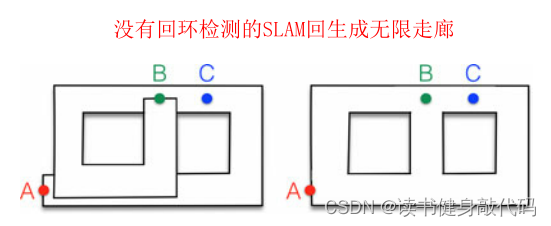
- 机器人需要SLAM吗?需要。没有回环检测的SLAM实际上就是一个视觉里程计,回环检测能够降低轨迹漂移(没有回环检测的SLAM就退化为里程计)。
- VIO目前效果最好,VIO是一个简化的SLAM,无回环检测。
- 能够理解环境真实的拓扑,且度量信息能够使定位和回环检测更简单可靠。
- 需要环境的地图和结构性的地图。
- SLAM被解决了吗? 没有。SLAM是一个综合性的问题,从很多方面来对这一领域的成熟度进行考察:
1. 机器人:运动类型,传感器,计算资源;
2. 环境、传感器对:如视觉和激光不同;
3. 性能的要求:状态和地图的精度,成功率,延迟时间,操作时间,地图尺寸等。
SLAM仍有不足之处,如快速移动的机器人无法很好建图。
- 机器人需要SLAM吗?需要。没有回环检测的SLAM实际上就是一个视觉里程计,回环检测能够降低轨迹漂移(没有回环检测的SLAM就退化为里程计)。
-
鲁棒感知阶段:
1.鲁棒:故障保护机制,参数自适应
2.超越三维重建,高层次理解:语义地图等。
3.资源意识(我理解是实时的轻量级SLAM)
4.任务相关的感知(特征点或者不同类型的地图) -
文章安排:
1.SLAM的公式和结构
2.鲁棒性
3.伸缩性
4.环境的几何表示
5.环境的语义表示
6.SLAM的理论成果
7.主动SLAM
8.最近趋势
CV,计算机集合,控制理论交叉
引言3s:SLAM的任务是定位和建图,在其他辅助手段不能用时可以用SLAM,回环检测能减少轨迹漂移,降低误差。机器人需要SLAM,且SLAM仍未被解决。
2. 现代SLAM系统拆解
1. 最大后验估计和后端
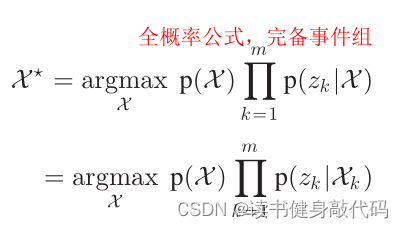
SLAM的数学模型就是运动方程和观测方程,主要是对轨迹X进行估计,进行最大后验估计,当没先验的时候,就成MLE

当观测独立时可以转化
还可以表示成因子图:
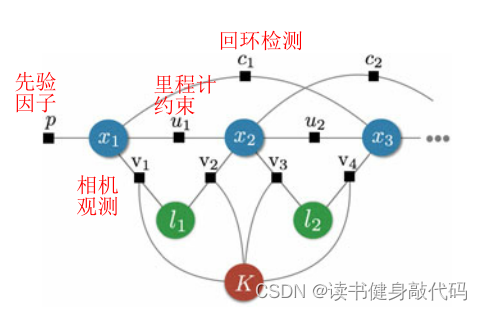
因子图的优点:
1.因子图能够可视化
2.能进行复杂的推理
3.能够影响SLAM问题的稀疏性
最大化后验概率转化为最小化最小二乘误差(14讲P123)















 9097
9097











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









