






0. 引言
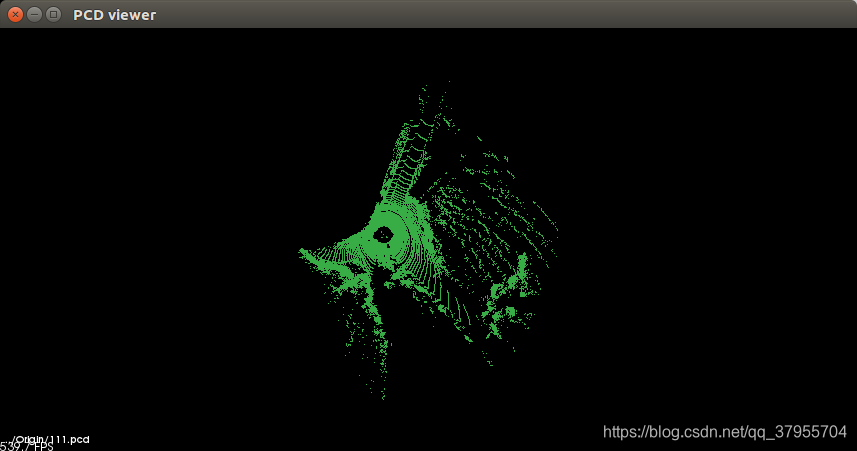
在获取点云数据时,由于设备的精度、周围环境等因素,点云数据中将不可避免的出现一些噪点,只有在滤波预处理中将噪点、离群点、孔洞按照后续处理定制,才能更好的进行配准,特征提取,曲面重建等操作。我们可以很明显的看到下图的右下方有很多离散的点,而这些噪声点对于我们后续的操作完全没有任何意义,甚至会产生不利的影响。
基于上面所描述的问题,我们可以使用VoxelGrid过滤器对PointCloud进行下采样,即在输入点云数据上创建一个3D体素网格(将体素网格视为一组空间中的微小3D框)。然后,在每个体素(即3D框)中,所有存在的点都将以其质心进行近似(即降采样)。这种方法比以体素的中心逼近它们要慢一些,但是它可以更准确地表示下面的表面。
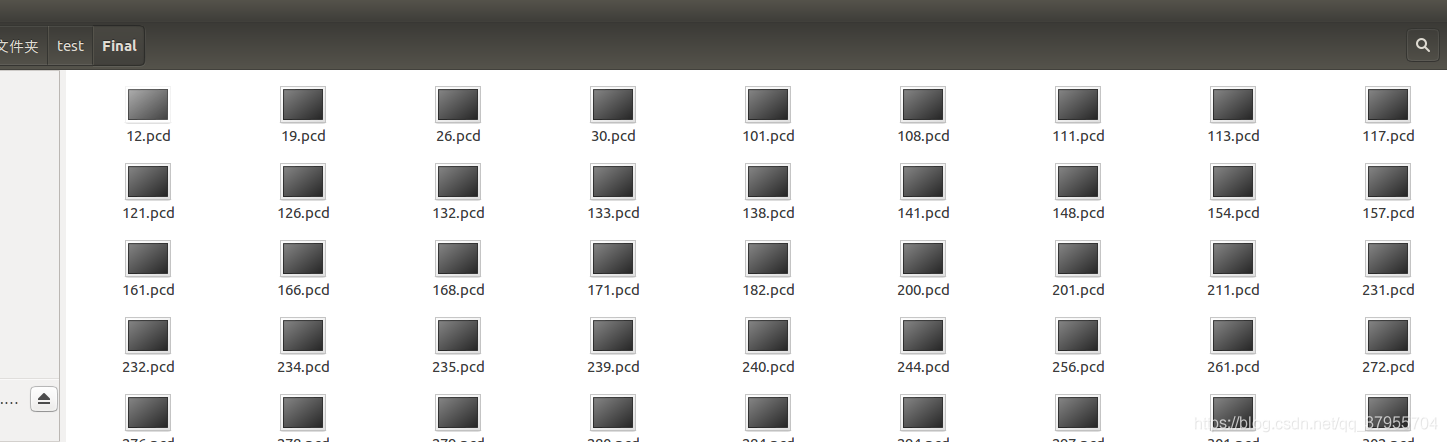
网上有很多博客以及学习资料只能对一个pcd文件进行下采样,但是我们往往处理的数据集都是成千上万的,如果使用那种原始的办法,等把成千上万的pcd文件下采样完,不知道要花多久时间。使用笔者的程序,使用者只需要创建相关目录,然后将要处理的文件放在Origin文件夹下,执行程序就可以了!生成的文件夹会自动放在Final文件夹下。
1. 创建工作目录
在家目录下创建一个工作文件夹,我在此创建的是test文件夹,在test文件夹下创建build、Origin、Final三个文件夹。Origin用于存放原始pcd的工作目录,Final用于存放下采样后的文件。
2. 创建 voxel_grid.cpp文件
在test文件夹下创建voxel_grid.cpp文件,其中程序如下:
**说明:分别将我的程序中的Origin_path、Final_path的变量改为自己所创建Origin_path和Final_path的目录,注意最后以/结束。如果不知道自己所创建的目录在哪儿,建议进入到所创建的文件夹下,使用pwd命令查看一下自己的目录,以保证程序运行正确。
#include<iostream>
#include <cstring>
#include<string.h>
#include <stdio.h>
#include<vector>
#include <dirent.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/voxel_grid.h>
using namespace std;
/* 请修改此处的地址,主要最后加 / */
char* Origin_path =(char*)"/home/ubuntu/test/Origin/";
char* Final_path = (char*)"/home/ubuntu/test/Final/";
void solve(string name){
char* p=(char*)name.data();
pcl::PCLPointCloud2::Ptr cloud (new pcl::PCLPointCloud2 ());
pcl::PCLPointCloud2::Ptr cloud_filtered (new pcl::PCLPointCloud2 ());
// Fill in the cloud data
pcl::PCDReader reader;
// Replace the path below with the path where you saved your file
cout << Origin_path+name <<endl;
reader.read(Origin_path+name, *cloud); // Remember to download the file first!
std::cerr << "PointCloud before filtering: " << cloud->width * cloud->height << " data points (" << pcl::getFieldsList (*cloud) << ")." << std::endl;
// Create the filtering object
pcl::VoxelGrid<pcl::PCLPointCloud2> sor;
sor.setInputCloud (cloud);
sor.setLeafSize (0.05f, 0.05f, 0.05f);
sor.filter (*cloud_filtered);
std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height << " data points (" << pcl::getFieldsList (*cloud_filtered) << ")." << std::endl;
pcl::PCDWriter writer;
cout << Final_path+name <<endl;
writer.write (Final_path+name, *cloud_filtered, Eigen::Vector4f::Zero (), Eigen::Quaternionf::Identity (), false);
}
int main (int argc, char** argv){
//用于存放目录下的所有文件名
vector<string> files;
DIR *d = opendir(Origin_path);
struct dirent *entry;
if (d == NULL){
printf("Path is NULL!");
return 0;
}
string s1 = "..";
string s2 = ".";
while((entry=readdir(d)) != NULL){
if(entry->d_name == s1 || entry->d_name == s2 )
continue;
files.push_back(entry->d_name);
}
closedir(d);
for(int i=0;i<files.size();i++){
cout << "\n**" << files[i]<< endl;
solve(files[i]);
printf("\n ** %d **\n",i+1);
}
return 0;
}
3. 创建CMakeLists.txt文件
在test文件夹下创建CMakeLists文件,其中文本如下:
cmake_minimum_required(VERSION 3.5)
project(voxel_grid)
find_package(PCL 1.2 REQUIRED)
# 加入Boost setting
find_package(Boost COMPONENTS program_options REQUIRED )
include_directories(${Boost_INCLUDE_DIRS})
link_directories(${Boost_LIBRARY_DIRS})
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (voxel_grid voxel_grid.cpp)
target_link_libraries (voxel_grid ${PCL_LIBRARIES} ${Boost_LIBRARIES})
4. cmake
进入到build目录,执行下面的命令:
cmake ..
5. make编译
make

6. 运行
./voxel_grid
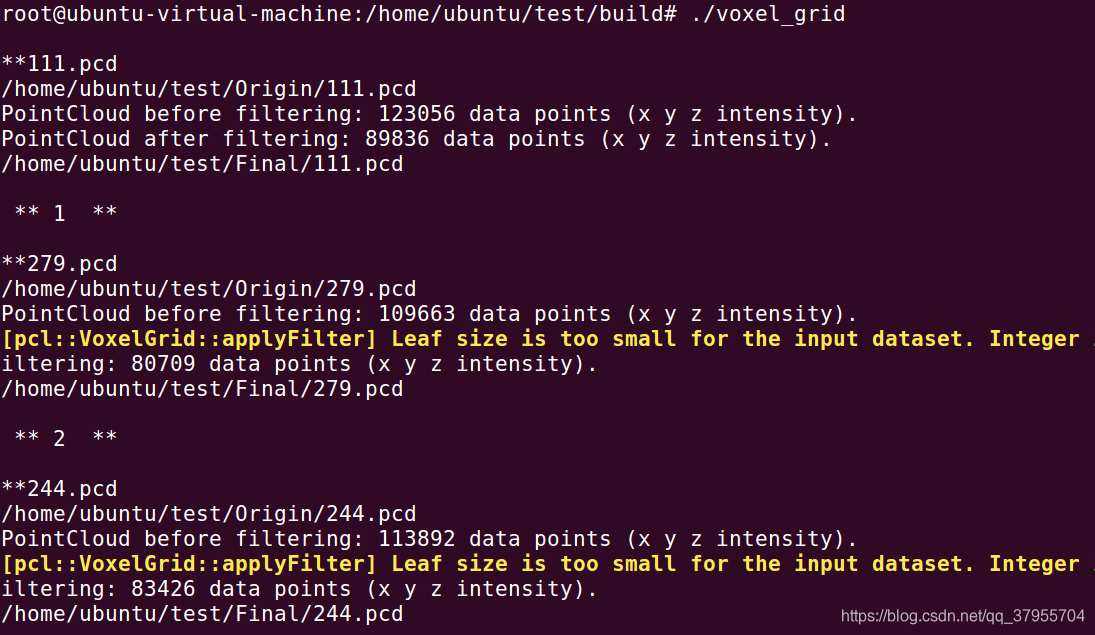
7. 执行结果如下:
8. 效果查看
->下采样前:
->下采样后:















 5734
5734











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









