







 本文介绍了一种使用极几何原理计算视差图的方法,通过处理同一物体在不同视角下的两幅图像,以提取前景并计算深度信息。文章详细阐述了StereoSGBM算法的参数设置及其实现过程,展示了如何利用OpenCV库进行视差图的计算。
本文介绍了一种使用极几何原理计算视差图的方法,通过处理同一物体在不同视角下的两幅图像,以提取前景并计算深度信息。文章详细阐述了StereoSGBM算法的参数设置及其实现过程,展示了如何利用OpenCV库进行视差图的计算。
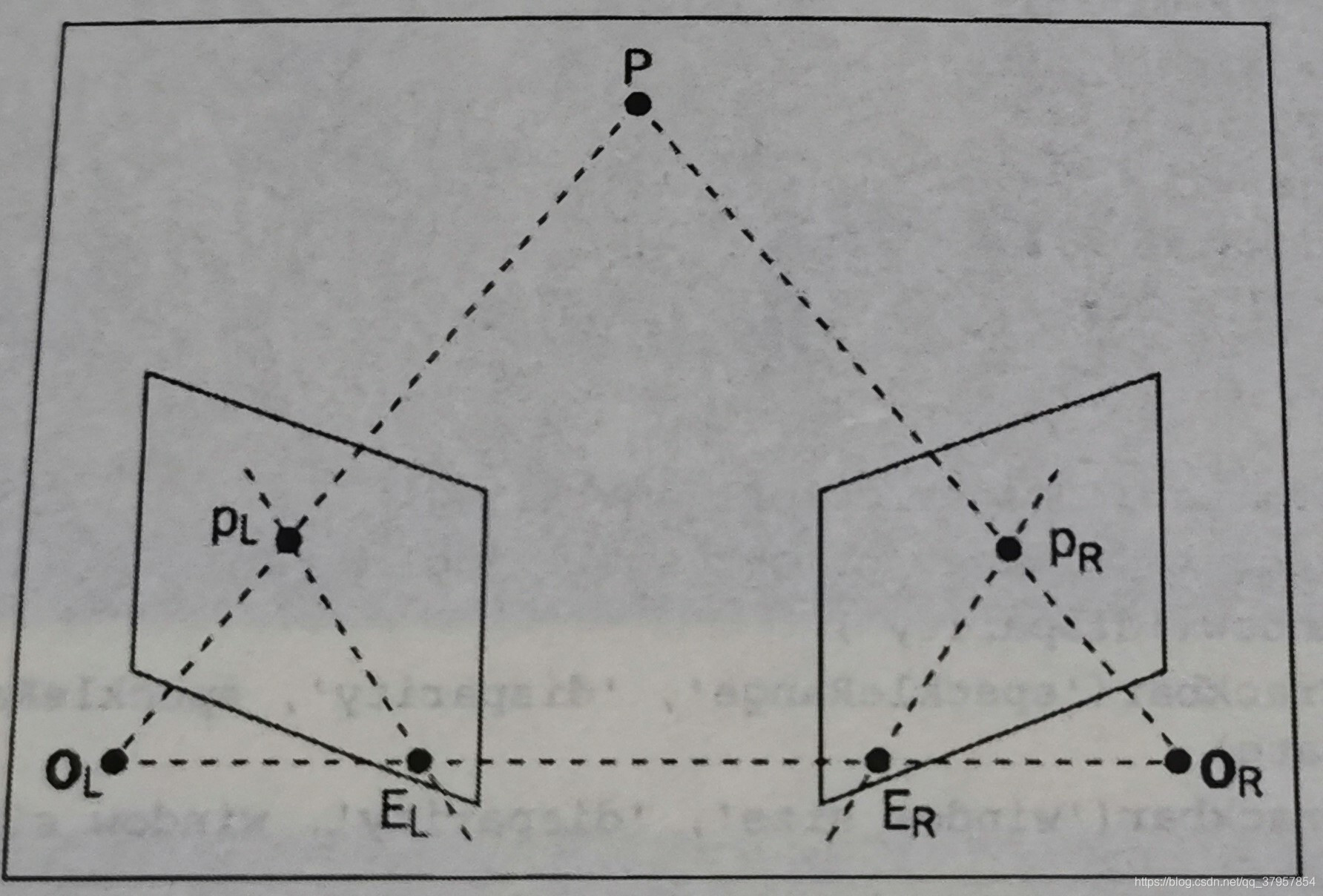
该算法使用极几何来计算所谓的视差图,它是对图像中检测到的不同深度的基本表示。这样就能提取出一张图片中的前景部分而抛弃其余部分。
首先需要同一物体在不同视角下拍摄的两幅图像,注意是在距物体相同距离拍摄的!否则计算会失败,计算得到的视差图就没有意义了。
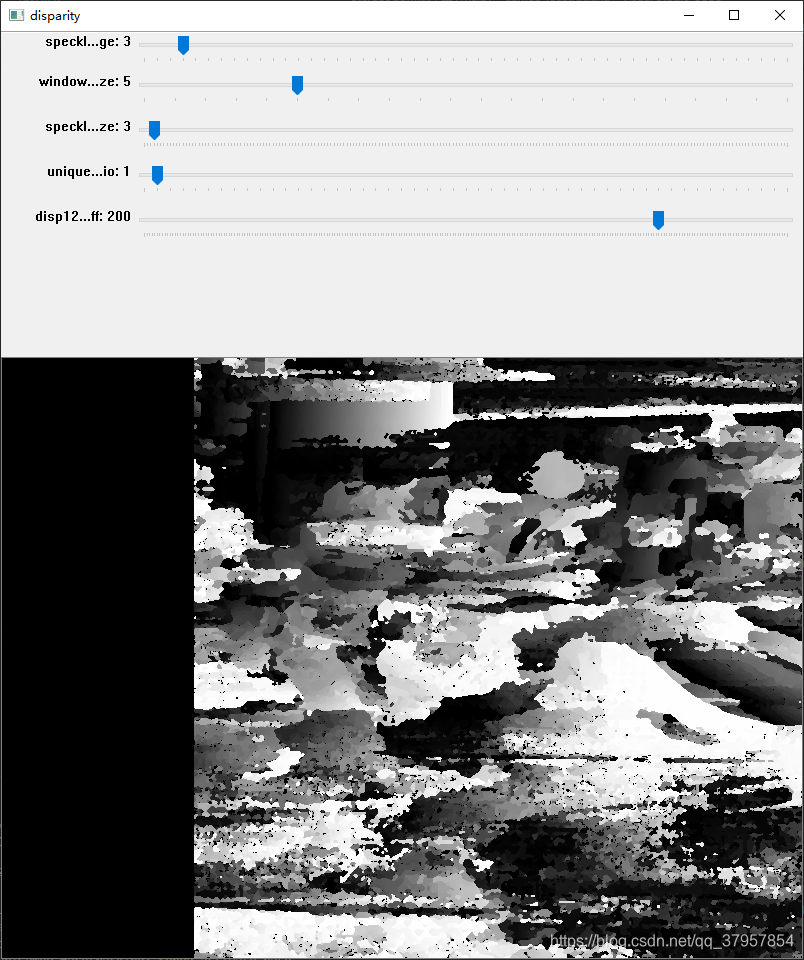
以下程序使用同一物体的两幅图像来计算视差图,距离摄像头近的点在视差图中会有更明亮的颜色。黑色区域代表两幅图像的差异部分。
import numpy as np
import cv2
def update(val = 0):
stereo.setBlockSize(cv2.getTrackbarPos('window_size', 'disparity'))
stereo.setUniquenessRatio(cv2.getTrackbarPos('uniquenessRatio', 'disparity'))
stereo.setSpeckleWindowSize(cv2.getTrackbarPos('speckleWindowSize', 'disparity'))
stereo.setSpeckleRange(cv2.getTrackbarPos('speckleRange', 'disparity'))
stereo.setDisp12MaxDiff(cv2.getTrackbarPos('disp12MaxDiff', 'disparity'))
print('computing disparity...')
disp = stereo.compute(imgL, imgR).astype(np.float32) / 16.0
cv2.imshow('left', imgL)
cv2.imshow('disparity', (disp-min_disp)/num_disp)
if __name__ == "__main__":
window_size = 5
min_disp = 16
num_disp = 192-min_disp
blockSize = window_size
uniquenessRatio = 1
speckleRange = 3
speckleWindowSize = 3
disp12MaxDiff = 200
P1 = 600
P2 = 2400
imgL = cv2.imread(r'C:\Users\Owen\Pictures\dis2.jpg')
imgR = cv2.imread(r'C:\Users\Owen\Pictures\dis1.jpg')
imgL = cv2.resize(imgL,dsize=None,fx=0.2,fy=0.2)
imgR = cv2.resize(imgR,dsize=None,fx=0.2,fy=0.2)
cv2.namedWindow('disparity')
cv2.createTrackbar('speckleRange', 'disparity', speckleRange, 50, update)
cv2.createTrackbar('window_size', 'disparity', window_size, 21, update)
cv2.createTrackbar('speckleWindowSize', 'disparity', speckleWindowSize, 200, update)
cv2.createTrackbar('uniquenessRatio', 'disparity', uniquenessRatio, 50, update)
cv2.createTrackbar('disp12MaxDiff', 'disparity', disp12MaxDiff, 250, update)
stereo = cv2.StereoSGBM_create(
minDisparity = min_disp, #表示可能的最小视差值。通常为0,但有时校正算法会移动图像,所以参数值也要相应调整
numDisparities = num_disp, #表示最大的视差值与最小的视差值之差,这个差值总是大于0。在当前的实现中,这个值必须要能被16整除
blockSize = window_size,
uniquenessRatio = uniquenessRatio,#表示由代价函数计算得到的最好(最小)结果值比第二好的值小多少(用百分比表示)才被认为是正确的。通常在5-15之间。
speckleRange = speckleRange, #指每个已连接部分的最大视差变化,如果进行斑点过滤,则该参数取正值,函数会自动乘以16、一般情况下取1或2就足够了。
speckleWindowSize = speckleWindowSize, #表示平滑视差区域的最大窗口尺寸,以考虑噪声斑点或无效性。将它设为0就不会进行斑点过滤,否则应取50-200之间的某个值。
disp12MaxDiff = disp12MaxDiff, #表示在左右视图检查中最大允许的偏差(整数像素单位)。设为非正值将不做检查。
P1 = P1, #控制视差图平滑度的第一个参数
P2 = P2 #控制视差图平滑度的第二个参数,值越大,视差图越平滑。P1是邻近像素间视差值变化为1时的惩罚值,
#p2是邻近像素间视差值变化大于1时的惩罚值。算法要求P2>P1,stereo_match.cpp样例中给出一些p1和p2的合理取值。
)
update()
cv2.waitKey()
**
StereoSGBM用到的参数:
**
minDisparity #表示可能的最小视差值。通常为0,但有时校正算法会移动图像,所以参数值也要相应调整
numDisparities #表示最大的视差值与最小的视差值之差,这个差值总是大于0。在当前的实现中,这个值必须要能被16整除
uniquenessRatio#表示由代价函数计算得到的最好(最小)结果值比第二好的值小多少(用百分比表示)才被认为是正确的。通常在5-15之间。
speckleRange #指每个已连接部分的最大视差变化,如果进行斑点过滤,则该参数取正值,函数会自动乘以16、一般情况下取1或2就足够了。
speckleWindowSize #表示平滑视差区域的最大窗口尺寸,以考虑噪声斑点或无效性。将它设为0就不会进行斑点过滤,否则应取50-200之间的某个值。
disp12MaxDiff #表示在左右视图检查中最大允许的偏差(整数像素单位)。设为非正值将不做检查。
P1 = P1, #控制视差图平滑度的第一个参数
P2 = P2 #控制视差图平滑度的第二个参数,值越大,视差图越平滑。P1是邻近像素间视差值变化为1时的惩罚值,
#p2是邻近像素间视差值变化大于1时的惩罚值。算法要求P2>P1,stereo_match.cpp样例中给出一些p1和p2的合理取值。
运行截图:

















 7400
7400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









