






 本文档提供了一份详细的 ORB_SLAM3 编译及运行过程中遇到的各种常见问题及其解决方案,包括但不限于软件包问题、Boost 库文件缺失、编译时的内部编译器错误等。
本文档提供了一份详细的 ORB_SLAM3 编译及运行过程中遇到的各种常见问题及其解决方案,包括但不限于软件包问题、Boost 库文件缺失、编译时的内部编译器错误等。
参考博文:https://blog.csdn.net/weixin_42203839/article/details/107728106 ORB_SLAM3的编译及运行【完整教程】
1.E: Unable to correct problems, you have held broken packages 类似下图

推荐解决方案:换阿里云镜像源(具体换源方法 百度很多)
其它参考方案:
https://www.cnblogs.com/schips/p/12470790.html 更换源
https://www.cnblogs.com/aaron-agu/p/8862624.html 使用aptitude(貌似不太安全)
https://blog.csdn.net/cnmilan/article/details/38270831 先删除,后安装(太繁琐)
2.fatal error: boost/serialization/serialization.hpp: No such file or directory
解决方案:sudo apt install libboost-filesystem-dev
3.c++: internal compiler error: Killed (program cc1plus)
推荐解决方案:使用make –j2 或者 make -jn 或者 make(而不是make -j) (建议将n设为cpu逻辑数量)
查看linux 版本: cat /proc/version
cpu逻辑数量: cat /proc/cpuinfo |grep "processor"|sort -u|wc -l
https://blog.csdn.net/dongfang1984/article/details/53841621 查询cpu信息
参考方案:https://blog.csdn.net/u011897411/article/details/89742008
本渣渣电脑 运行./build.sh 编译24小时未果 果断放弃 查看其内部命令为 make –j 故改之
4.dd: failed to open '/swapfile': Text file busy
解决方案:sudo swapoff –a(watch free –m 监控内存变化)
5.fatal error: openssl/md5.h: No such file or directory
解决方案:sudo apt install libssl-dev
6.Error: Unspecified error (The function is not implemented. Rebuild the library with Windows, GTK+ 2.x or Carbon support
已经安装好了相应的库 重新编译之后还是这个错误 略坑
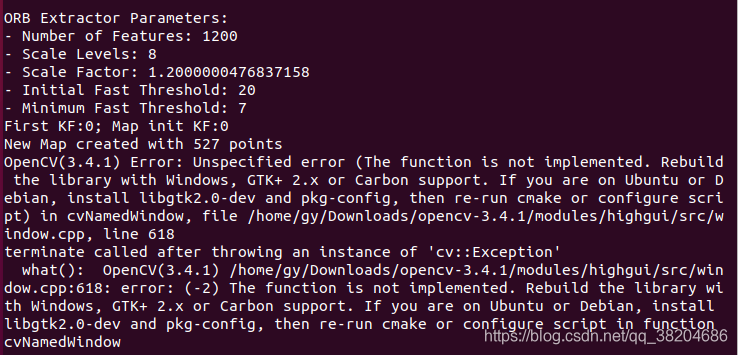
解决方案:需卸载opencv重新安装
https://blog.csdn.net/amateur_/article/details/79854465 具体卸载方法
https://blog.csdn.net/loveaborn/article/details/7647734 问题参考
阿里镜像源
deb http://mirrors.aliyun.com/ubuntu/ bionic main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ bionic-backports main restricted universe multiverse


















 1623
1623

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











