







低成本MEMS INS系统 + GNSS组合导航序贯滤波MATLAB仿真
对于标准Kalman滤波,其中增益计算式涉及矩阵的求逆运算,当量测维数较高时,计算量很大。序贯滤波(sequential Kalman filter)是一种将高维数量测更新降低为多个低维数量测更新的方法,能有效地降低矩阵的求逆计算量。
序贯滤波与kalman滤波最大的区别在于,量测更新的过程:
滤波系统的随机状态空间模型为:

但是,这里假设在K时刻量测方程可以分解成如下N组:

且量测噪声之间互不相关,这时量测噪声方差阵可写成分块对角阵形式,即:

序贯滤波的流程框图如下图所示:

其中,量测更新过程分为N次的迭代更新,最终使得
X
k
(
N
)
=
X
k
X^{(N)}_k=X_k
Xk(N)=Xk,
P
k
(
N
)
=
P
k
P^{(N)}_k=P_k
Pk(N)=Pk:


编写量测更新程序具体如下:
n=length(Zk);
for k=1:n
Rk0=kf.Rk(k,k);Zk0=Zk(k);Hk0=kf.Hk(k,:);
kf.PXZkk_1 = kf.Pkk_1*Hk0';
kf.PZkk_1 = Hk0*kf.PXZkk_1 + Rk0;
kf.Kk = kf.PXZkk_1/kf.PZkk_1;
kf.Xk = kf.Xkk_1 + kf.Kk*(Zk0-Hk0*kf.Xkk_1);
% kf.Pk = kf.Pkk_1 - kf.Kk*kf.PZkk_1*kf.Kk';
kf.Pk = kf.Pkk_1 - kf.Kk*Hk0*kf.Pkk_1;
kf.Xkk_1=kf.Xk;
kf.Pkk_1=kf.Pk;
end
仿真结果:
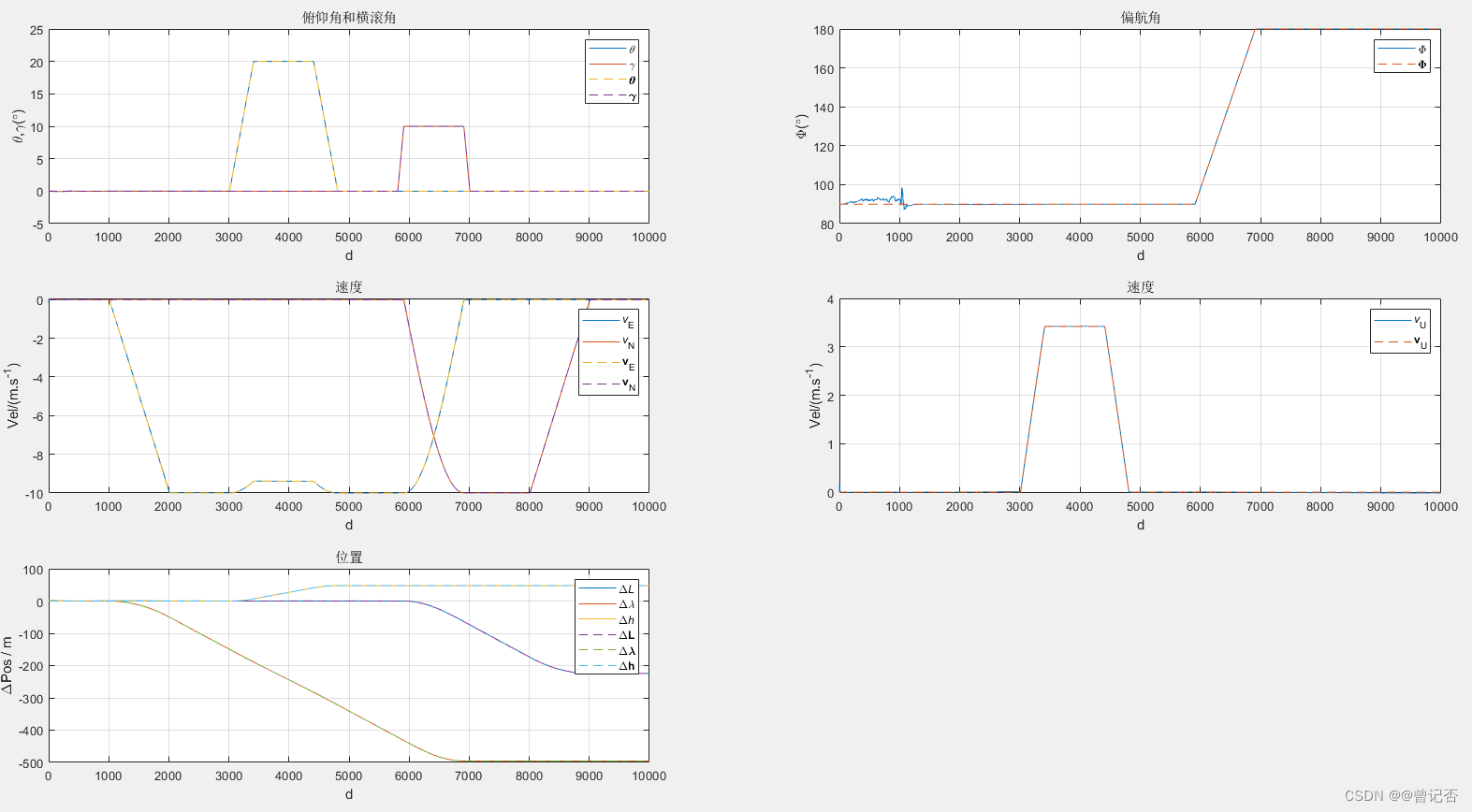
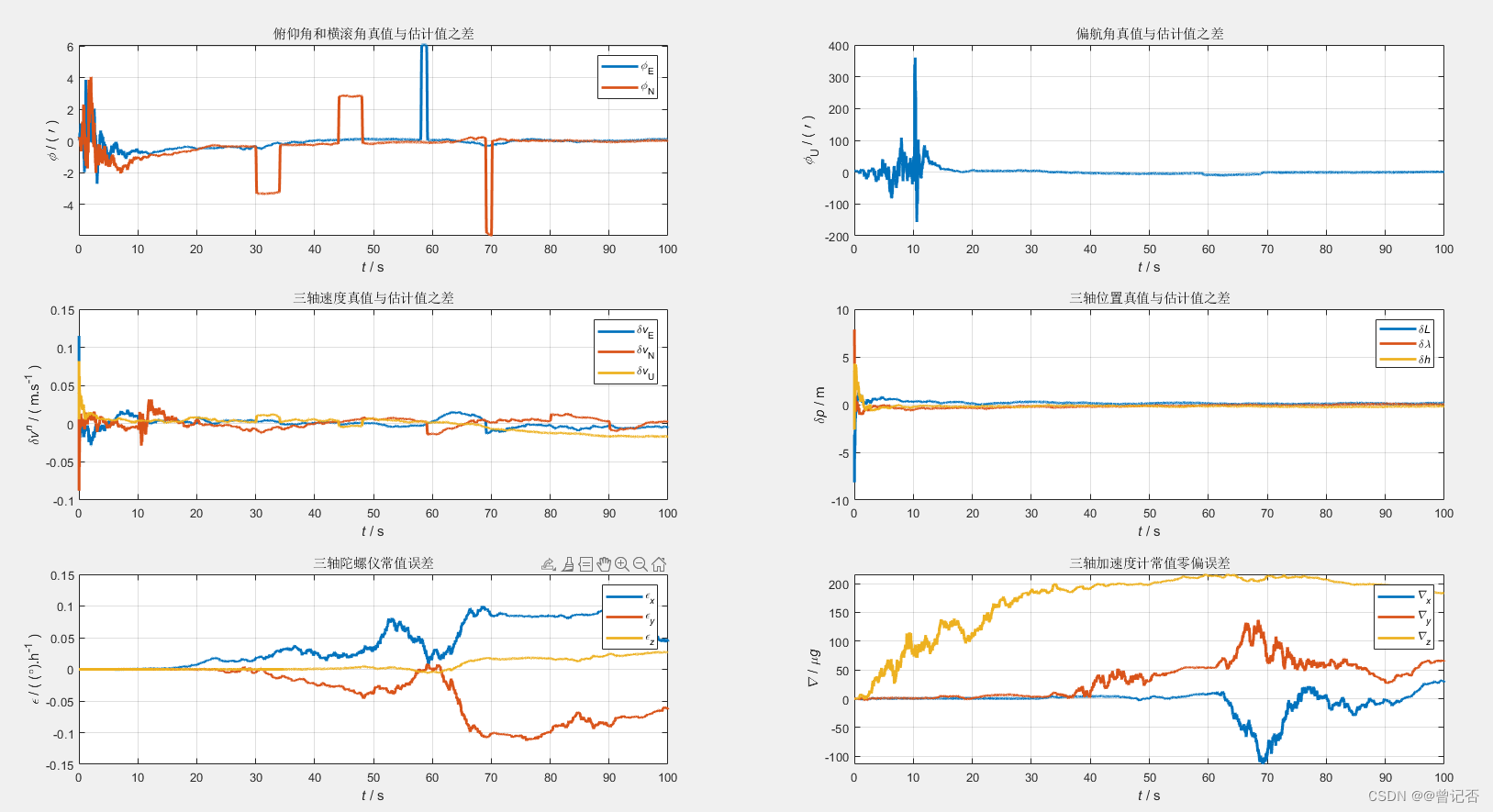

完整的代码见:序贯滤波(sequential Kalman filter)+ MATLAB程序(简化版sins与gnss融合)















 557
557











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









