







要实现机器人的自主移动,定位导航技术是关键,由于定位导航技术在实现上具有很高的门槛,基于机器人底盘直接进行上层开发的机器人企业越来越多。它可帮助机器人企业降低研发成本,快速抢占市场先机。
机器人底盘集成了众多不同的传感器,包括激光雷达、视觉、超声波、红外传感器等,以及轮子等必要的悬挂。而将这些硬件进行集合的,则是相应的算法及软件。
稳定性检验机器人底盘好坏最为重要的标准,其次还包括了能耗、承载能力及后期的维护成本等。
不同的机器人产品对底盘的要求也不相同,如扫地机器人需要低成本的激光导航方案,其他服务机器人需要兼具灵活性与安全性的激光雷达+视觉的导航方案,工业AGV则需要更具精准性的导航方案。
根据机器人底盘种类的不同,目前,市面的机器人底盘主要有履带式及轮式机器人底盘之分。
履带式机器人底盘
履带式机器人底盘在特种机器人身上使用较多,可适用于野外、城市环境等,能在各类复杂地面运动,例如沙地、泥地等,但速度相对较低,且运动噪声较大。

轮式机器人底盘
轮式机器人底盘是目前服务机器人企业使用较多的底盘,主要有前轮转向后轮差速驱动、两轮驱动+万向轮、四轮驱动之分。
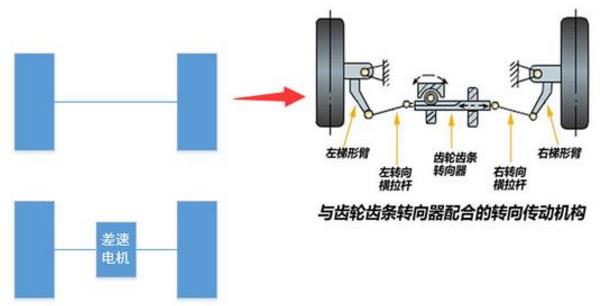
1.前轮转向+后轮驱动
前轮转向+后轮驱动的轮式机器人底盘主要采用电缸、蜗轮蜗杆等形式实现前轮转向,后轮只要一个电机再加上差速减速器,便可完成机器人的移动要求。具有成本低、控制简单等优缺点,但缺点在于转弯半径较大,使用相对不那么灵活。
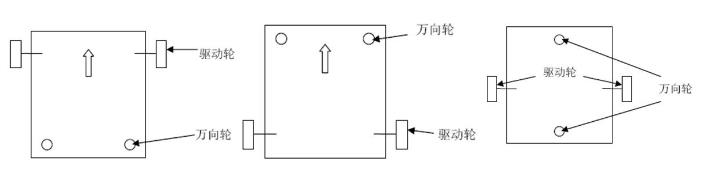
2.两轮驱动+万向轮
两轮驱动+万向轮可根据机器人对设计重心、转弯半径的要求,将万向轮和驱动轮布置不同的形式,结构及电机控制也相对简单,机器人灵活性较强,且算法易控制。
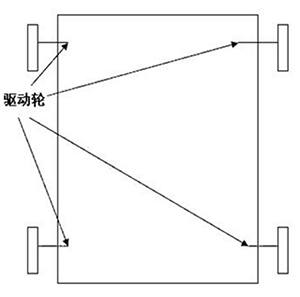
3.四轮驱动
四轮驱动在直线行走上能力较强,驱动力也比较大,但成本过高,电机控制较为复杂,为防止机器人打滑,需要更精细的结构设计。
从灵活性上来说,两轮驱动+万向轮的轮式机器人底盘更具优势,思岚科技的机器人底盘就采用了这种结构的设计。它能做到自主定位建图、路径规划及自主避障等功能,可在各种障碍物之间穿梭自如。

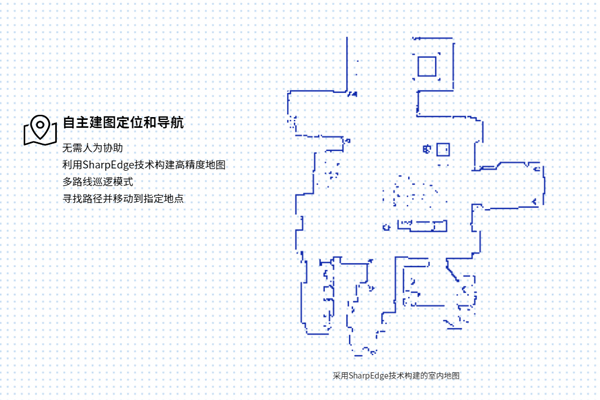
以思岚科技的轮式机器人底盘Apollo为例,在陌生环境中Apollo能做到实时定位并完成高精度地图绘制,采用SharpEdgeTM精细化地图构建技术,可构建出高精度、厘米级别地图,具有超高分辨率,不存在累加误差。同时,构建的地图可直接使用,无需二次优化修饰,直接满足使用预期,即时在复杂多变的场景下行走,Apollo也能做到动态识别环境中的人或其他障碍物,实现智能行走。
同时,Apollo采用了多传感器融合技术,结合了激光雷达、深度摄像头、超声波、防跌落等多种传感器,激光雷达可帮助机器人时刻扫描周围环境,提供地图数据,构建高精度地图,并基于该地图数据实现自主路径规划及导航功能;遇到玻璃、镜面等高透材质障碍物时,超声波传感器能让Apollo做到及时识别、避让;深度摄像头则可侦测到位于雷达扫描平面上方的障碍物,并及时发送信号进行规避;而防跌落传感器可帮助Apollo轮式机器人底盘全方位侦察周围的工作环境,判断工作区域是否存在边界、台阶、坡度等情况,从而发送信号请求机器人移动底盘改变前进方便,避免跌落。

此外,Apollo还可进行虚拟墙&虚拟轨道设置,基于纯软件方式进行操作,无需额外辅助铺设,即可对Apollo进行活动范围及行走路线设置。同时支持自主返回充电、云端远程管理及提供外扩硬件支持等。不仅如此,轮式机器人底盘Apollo扩展接口还集成了网口,供电接口和各种控制接口以便用户快速进行开发扩展。可通过有线网络或WIFI与外部通信,其本身自带的电池可以为自身与外接的扩展模块供电,用户可以通过各种控制接口对整个Apollo及其上层扩展模块进行控制。

思岚科技Apollo轮式机器人底盘应用案例
目前,基于Apollo轮式机器人底盘而完成上层应用的服务机器人已在各大领域被广泛应用,如达闼医护助理机器人Pepper、阿里巴巴巡检机器人 Diana、万德昌送餐机器人熊二等。依靠思岚科技自研的高性能定位导航技术,可帮助各类服务机器人实现复杂场景的智能移动。

















 432
432

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









