







常见底盘:
对一个智能机器人来说最基本的是底盘,大到无人驾驶,小到最基础的智能小车,工业上应用较多的有AGV自动引导运输车(2wd,4wd,6wd),履带车都为差速驱动,家庭中如扫地机器人(采用差速控制)都是移动机器人的应用,机器人还有全向三轮底盘(omni_3),全向四轮底盘(omni_4),四轮麦克纳姆轮(mecanum),阿克曼无人车(ackermann 前轮转向,后轮驱动)等。
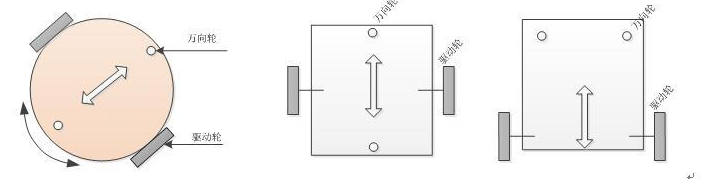
两轮差速底盘运动学分析
两轮差速底盘由两个动力轮位于底盘左右两侧,两轮控制速度,通过给定不同速度来实现转向控制,一般会加一到两个的辅助支撑轮。
主要底盘有:
Turtlebot
扫地机器人
AGV小车
两轮差速底盘模型


如图车体速度为V,左右轮速度分别为 VL和VR,车体角速度为W,转弯半径为R,左右轮的间距为D,两轮到车体中心的距离为d
运动学方程
① VL=W*(L+D)=W*(L+2d)=W*(R+d)=V+Wd 左轮速度
② VR=WL=W(R-d)=V-Wd 右轮速度
③ V=WR=W(L+d)=(VL+ VR)/2 车体速度
④ ① -②可得W=(VL-VR)/2d 车体角速度

基于轮式里程计的航迹推算

















 1999
1999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









