







2D + 3D DenseNet代码
网络结构
本文只介绍DenseNet的代码实现,需要对其论文有一定基础的了解。代码参考
torchvision-densenet
monai-desenet
torchvision里densenet代码分析
DenseNet代码研读
3d-densenet
DenseNet 2D
import re
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.utils.model_zoo as model_zoo
from collections import OrderedDict
from typing import Any, List, Optional, Tuple
class _DenseLayer(nn.Module):
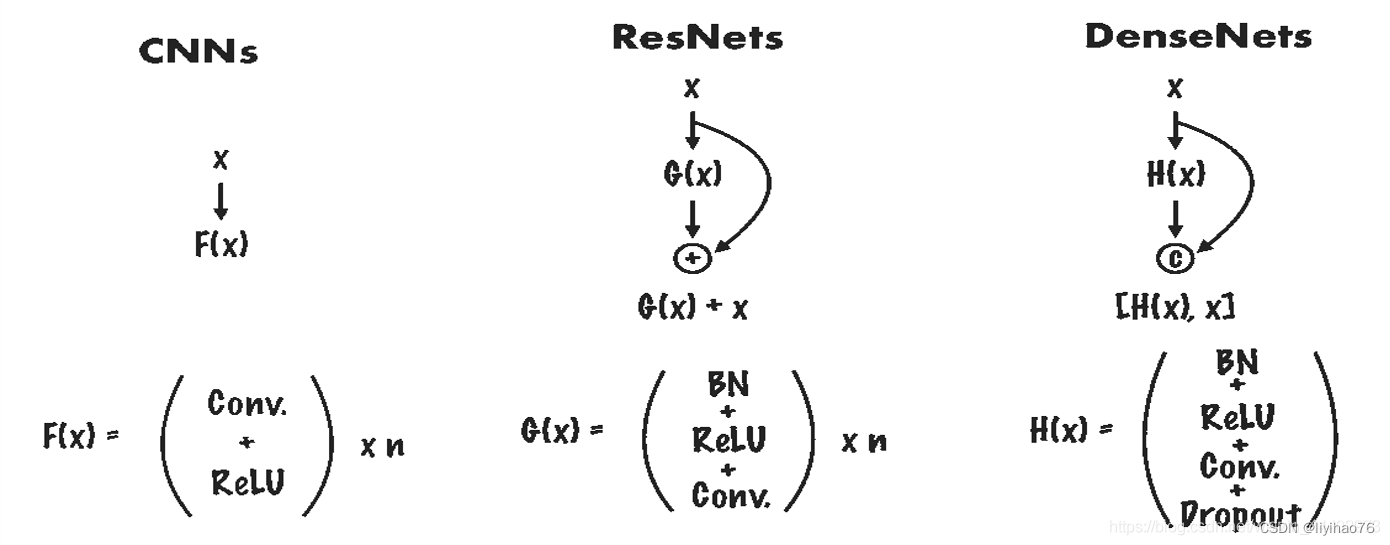
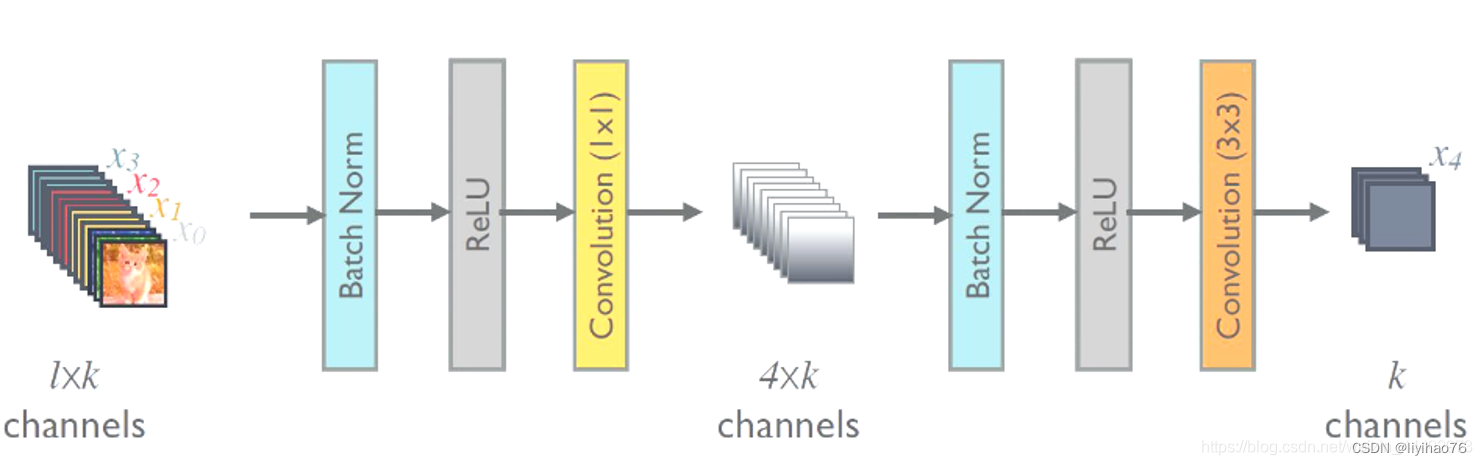
# 1.Dense layer的结构参照了ResNetV2的结构,BN->ReLU->Conv
# 2.与ResNet的bottleneck稍有不同的是,此处仅做两次conv(1*1conv,3*3conv),不需要第三次1*1conv将channel拉升回去
# 由于Dense block中Tensor的channel数是随着Dense layer不断增加的
# 所以Dense layer设计的就很”窄“(channel数很小,固定为growth_rate),每层仅学习很少一部分的特征
# 3.想象一下,如果设计的和bottleneck一样,输出的channel为[256, 512, 1024, 2048],那么几次堆叠之后会非常的大
def __init__(self, num_input_features: int, growth_rate: int, bn_size: int, drop_rate: float):
# num_input_features : number of the input channel.
# growth_rate: 代表每一层有多少个新的feature层添加进去 (paper里面是k). 增长速率,第二个卷积层输出特征图
# bn_size: multiplicative factor for number of bottle neck layers.
# (i.e. bn_size * k features in the bottleneck layer 第一个卷积层输出特征图)
super().__init__()
self.layers = nn.Sequential()
self.layers.add_module('norm1', nn.BatchNorm2d(num_input_features)) #这里要看到denselayer里其实主要包括两个卷积层,而且他们的channel数值得关注 #
self.layers.add_module('relu1', nn.ReLU(inplace=True))
self.layers.add_module('conv1', nn.Conv2d(num_input_features, bn_size *
growth_rate, kernel_size=1, stride=1, bias=False))
self.layers.add_module('norm2', nn.BatchNorm2d(bn_size * growth_rate))
self.layers.add_module('relu2', nn.ReLU(inplace=True))
self.layers.add_module('conv2', nn.Conv2d(bn_size * growth_rate, growth_rate,
kernel_size=3, stride=1, padding=1, bias=False)) #这里注意的是输出的channel数是growth_rate #
# 每一Dense layer结束后dropout丢弃的feature maps的比例
self.drop_rate = drop_rate
def forward(self, x):#这里是前传,主要解决的就是要把输出整形,把layer的输出和输入要cat在一起 #
new_features = self.layers(x)
if self.drop_rate > 0:
# 若设置了dropout丢弃比例,则按比例”丢弃一部分的features“(将该部分features置为0),channel数仍为growth_rate
new_features = F.dropout(new_features, p=self.drop_rate, training=self.training)
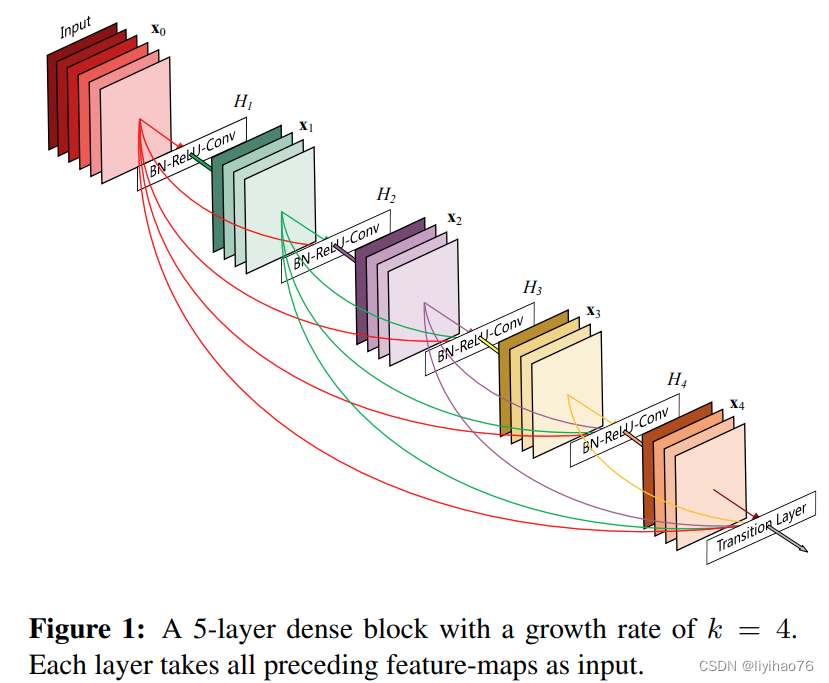
# 最后将新生成的featrue map和输入的feature map在channel维度上concat起来
# 1.不需要像ResNet一样将x进行变换使得channel数相等
# 因为DenseNet 3*3conv stride=1 不会改变Tensor的h,w,并且最后是channel维度上的堆叠而不是相加
# 2.原文中提到的内存消耗多也是因为这步,在一个block中需要把所有layer生成的feature都保存下来
return torch.cat([x, new_features], 1) #在channel上cat在一起,以形成dense连接 #
class _DenseBlock(nn.Sequential):
def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):
# num_layers: number of layers in the block.
super().__init__()
# for循环就是根据num_layers逐层添加Dense Block注意每一层的输入num_input features不一样,
# 是因为每一个DenseLayer之后feature的数目都会增加growth rate。
# 直观一点理解,其实就是每一层的DenseLayer附带了自己学习到的feature还有自己本身一起传入下一个DenseLayer。
for i in range(num_layers):
# 由于一个DenseBlock中,每经过一个layer,宽度(channel)就会堆叠增加growth_rate,所以仅需要改变num_input_features即可
layer = _DenseLayer(num_input_features + i * growth_rate, growth_rate, bn_size, drop_rate)
self.add_module('denselayer%d' % (i + 1), layer)
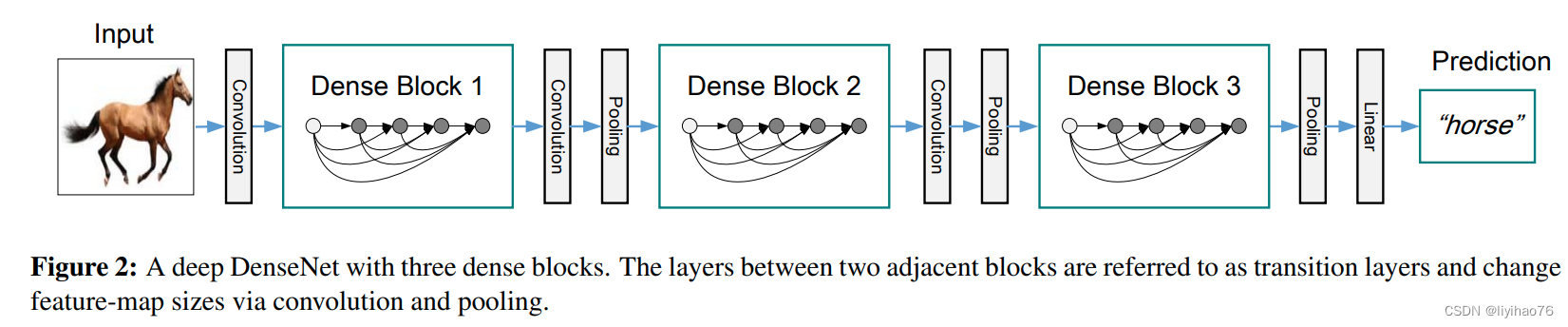
# 在DenseBlock之间,还添加了Transition层,这个层的作用是为了进一步提高模型的紧凑性,可以减少过渡层的特征图的数量。
class _Transition(nn.Sequential):
''' 过渡层,两个作用 '''
def __init__(self, num_input_features, num_output_features):
super().__init__()
self.add_module('norm', nn.BatchNorm2d(num_input_features))
self.add_module('relu', nn.ReLU(inplace=True))
# 作用一:即使每一层Dense layer都采取了很小的growth_rate,但是堆叠之后channel数难免会越来越大
# 所以需要在每一个Dense block之后接transition层用1*1conv将channel再拉回到一个相对较低的值(一般为输入的一半)
self.add_module('conv', nn.Conv2d(num_input_features, num_output_features,
kernel_size=1, stride=1, bias=False))
# 作用而:用average pooling改变图像分辨率,下采样
self.add_module('pool', nn.AvgPool2d(kernel_size=2, stride=2))
class DenseNet(nn.Module):
"""
Args:
growth_rate (int) - how many filters to add each layer (`k` in paper)
block_config (list of 4 ints) - how many layers in each pooling block
num_init_features (int) - the number of filters to learn in the first convolution layer
bn_size (int) - multiplicative factor for number of bottle neck layers
(i.e. bn_size * k features in the bottleneck layer)
drop_rate (float) - dropout rate after each dense layer
num_classes (int) - number of classification classes
"""
def __init__(
self,
growth_rate: int = 32,
block_config: Tuple[int, int, int, int] = (6, 12, 24, 16),
num_init_features: int = 64,
bn_size: int = 4,
drop_rate: float = 0,
num_classes: int = 1000
):
super().__init__()
# First convolution 初始化层,图像进来后不是直接进入denseblock,先使用大的卷积核,大步长,进一步压缩图像尺寸
# 注意的是nn.Sequential的用法,ordereddict使用的方法,给layer命名,
# 还有就是各层的排列,conv->bn->relu->pool 经过这一个操作就是尺寸就成为了1/4,数据量压缩了
self.features = nn.Sequential(OrderedDict([
('conv0', nn.Conv2d(3, num_init_features, kernel_size=7, stride=2, padding=3, bias=False)),
('norm0', nn.BatchNorm2d(num_init_features)),
('relu0', nn.ReLU(inplace=True)),
('pool0', nn.MaxPool2d(kernel_size=3, stride=2, padding=1)),
])) #这里使用了batchnorm2d batchnorm 最近有group norm 是否可以换
# Each denseblock 创建denseblock
num_features = num_init_features
for i, num_layers in enumerate(block_config):
block = _DenseBlock(num_layers=num_layers, num_input_features=num_features,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
self.features.add_module('denseblock%d' % (i + 1), block)
num_features = num_features + num_layers * growth_rate
# 第四个Dense block后不再连接Transition层
if i != len(block_config) - 1:
# 此处可以看到,默认过渡层将channel变为原来输入的一半
trans = _Transition(num_input_features=num_features, num_output_features=num_features // 2)
self.features.add_module('transition%d' % (i + 1), trans)
num_features = num_features // 2
# Final batch norm
self.features.add_module("norm5", nn.BatchNorm2d(num_features))
# Linear layer
self.classifier = nn.Linear(num_features, num_classes)
# Official init from torch repo.
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.constant_(m.bias, 0)
def forward(self, x):
features = self.features(x)
out = F.relu(features, inplace=True)
out = F.adaptive_avg_pool2d(out, (1, 1))
out = torch.flatten(out, 1)
out = self.classifier(out)
return out
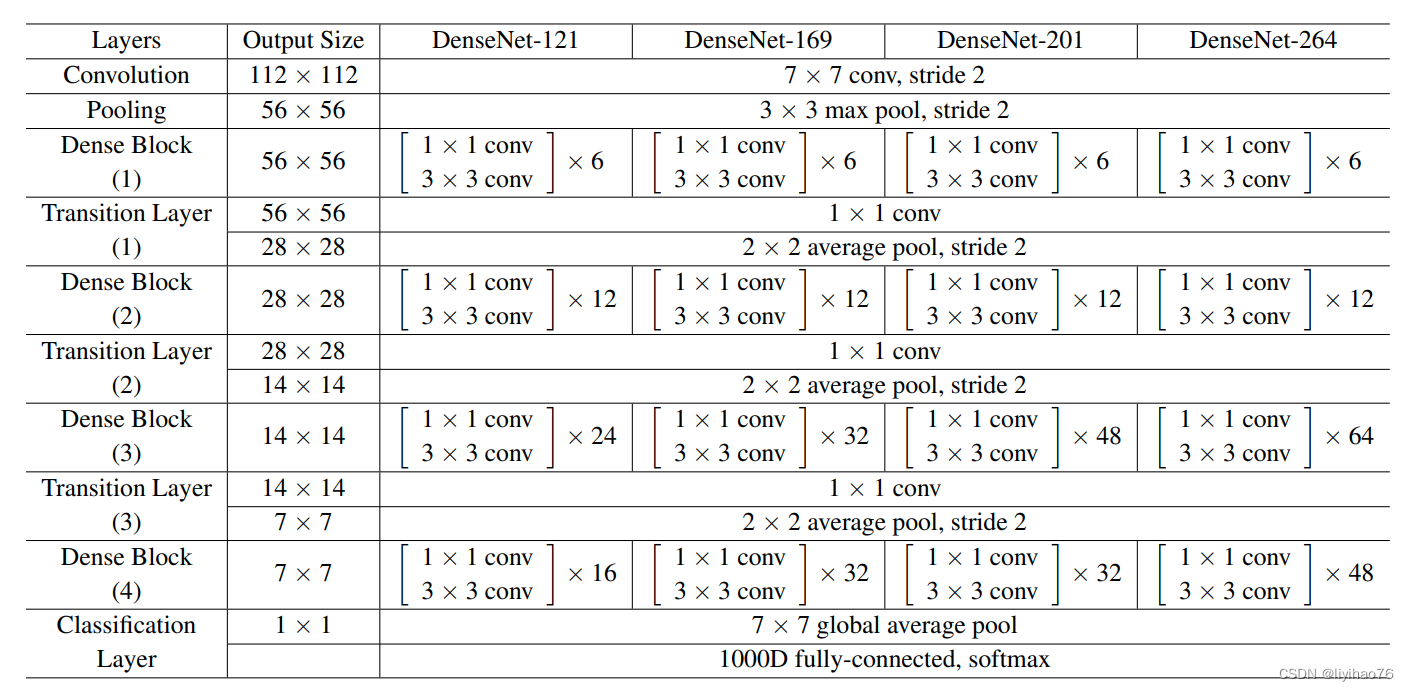
densenet121 = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 24, 16))
densenet169 = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 32, 32))
densenet201 = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 48, 32))
densenet264 = DenseNet(num_init_features=64, growth_rate=32, block_config=(6, 12, 64, 48))
可视化
x=torch.randn(1,3,224,224)
X=densenet121(x)
print(X.shape) # torch.Size([1, 1000])
import netron
import torch.onnx
import onnx
modelData ='demo.onnx' # 定义模型数据保存的路径
torch.onnx.export(densenet121, x, modelData) # 将 pytorch 模型以 onnx 格式导出并保存
onnx.save(onnx.shape_inference.infer_shapes(onnx.load(modelData)), modelData)
netron.start(modelData)
改写
class DenseNet_2d(nn.Module):
"""
Args:
growth_rate (int) - how many filters to add each layer (`k` in paper)
block_config (list of 4 ints) - how many layers in each pooling block
num_init_features (int) - the number of filters to learn in the first convolution layer
bn_size (int) - multiplicative factor for number of bottle neck layers
(i.e. bn_size * k features in the bottleneck layer)
drop_rate (float) - dropout rate after each dense layer
num_classes (int) - number of classification classes
"""
def __init__(
self,
growth_rate: int = 32,
block_config: Tuple[int, int, int, int] = (6, 12, 24, 16),
num_init_features: int = 64,
bn_size: int = 4,
drop_rate: float = 0,
num_classes: int = 1000
):
super().__init__()
# First convolution 初始化层,图像进来后不是直接进入denseblock,先使用大的卷积核,大步长,进一步压缩图像尺寸
# 注意的是nn.Sequential的用法,ordereddict使用的方法,给layer命名,
# 还有就是各层的排列,conv->bn->relu->pool 经过这一个操作就是尺寸就成为了1/4,数据量压缩了
self.Conv1 = nn.Sequential(OrderedDict([
('conv0', nn.Conv2d(3, num_init_features, kernel_size=7, stride=2, padding=3, bias=False)),
('norm0', nn.BatchNorm2d(num_init_features)),
('relu0', nn.ReLU(inplace=True)),
('pool0', nn.MaxPool2d(kernel_size=3, stride=2, padding=1)),
])) #这里使用了batchnorm2d batchnorm 最近有group norm 是否可以换
# Each denseblock 创建denseblock
num_features = num_init_features
##############################
self.Dense_Block_1 = _DenseBlock(num_layers=block_config[0], num_input_features=num_features,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
num_features1_T = num_features + block_config[0] * growth_rate
self.Transition_Layer_1 = _Transition(num_input_features=num_features1_T, num_output_features=num_features1_T // 2)
num_features2 = num_features1_T // 2
################################
self.Dense_Block_2 = _DenseBlock(num_layers=block_config[1], num_input_features=num_features2,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
num_features2_T = num_features2 + block_config[1] * growth_rate
self.Transition_Layer_2 = _Transition(num_input_features=num_features2_T, num_output_features=num_features2_T // 2)
num_features3 = num_features2_T // 2
################################
self.Dense_Block_3 = _DenseBlock(num_layers=block_config[2], num_input_features=num_features3,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
num_features3_T = num_features3 + block_config[2] * growth_rate
self.Transition_Layer_3 = _Transition(num_input_features=num_features3_T, num_output_features=num_features3_T // 2)
num_features4 = num_features3_T // 2
################################
self.Dense_Block_4 = _DenseBlock(num_layers=block_config[3], num_input_features=num_features4,
bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
num_features5 = num_features4 + block_config[3] * growth_rate
self.finale_bn = nn.BatchNorm2d(num_features5)
# for i, num_layers in enumerate(block_config):
# block = _DenseBlock(num_layers=num_layers, num_input_features=num_features,
# bn_size=bn_size, growth_rate=growth_rate, drop_rate=drop_rate)
# self.features.add_module('denseblock%d' % (i + 1), block)
# num_features = num_features + num_layers * growth_rate
# # 第四个Dense block后不再连接Transition层
# if i != len(block_config) - 1:
# # 此处可以看到,默认过渡层将channel变为原来输入的一半
# trans = _Transition(num_input_features=num_features, num_output_features=num_features // 2)
# self.features.add_module('transition%d' % (i + 1), trans)
# num_features = num_features // 2
# Final batch norm
#self.features.add_module("norm5", nn.BatchNorm2d(num_features))
# Linear layer
self.classifier = nn.Linear(num_features5, num_classes)
# Official init from torch repo.
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight)
elif isinstance(m, nn.BatchNorm2d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.constant_(m.bias, 0)
def forward(self, x):
#features = self.features(x)
out = self.Conv1(x)
out = self.Dense_Block_1(out)
out = self.Transition_Layer_1(out)
out = self.Dense_Block_2(out)
out = self.Transition_Layer_2(out)
out = self.Dense_Block_3(out)
out = self.Transition_Layer_3(out)
out = self.Dense_Block_4(out)
out = self.finale_bn(out)
out = F.relu(out, inplace=True)
out = F.adaptive_avg_pool2d(out, (1, 1))
out = torch.flatten(out, 1)
out = self.classifier(out)
return out
DenseNet 3D
class _DenseLayer_3d(nn.Sequential):
def __init__(self, num_input_features, growth_rate, bn_size, drop_rate):
super().__init__()
self.add_module('norm1', nn.BatchNorm3d(num_input_features))
self.add_module('relu1', nn.ReLU(inplace=True))
self.add_module(
'conv1',
nn.Conv3d(num_input_features,
bn_size * growth_rate,
kernel_size=1,
stride=1,
bias=False))
self.add_module('norm2', nn.BatchNorm3d(bn_size * growth_rate))
self.add_module('relu2', nn.ReLU(inplace=True))
self.add_module(
'conv2',
nn.Conv3d(bn_size * growth_rate,
growth_rate,
kernel_size=3,
stride=1,
padding=1,
bias=False))
self.drop_rate = drop_rate
def forward(self, x):
new_features = super().forward(x)
if self.drop_rate > 0:
new_features = F.dropout(new_features,
p=self.drop_rate,
training=self.training)
return torch.cat([x, new_features], 1)
class _DenseBlock_3d(nn.Sequential):
def __init__(self, num_layers, num_input_features, bn_size, growth_rate, drop_rate):
super().__init__()
for i in range(num_layers):
layer = _DenseLayer_3d(num_input_features + i * growth_rate,
growth_rate, bn_size, drop_rate)
self.add_module('denselayer{}'.format(i + 1), layer)
class _Transition_3d(nn.Sequential):
def __init__(self, num_input_features, num_output_features):
super().__init__()
self.add_module('norm', nn.BatchNorm3d(num_input_features))
self.add_module('relu', nn.ReLU(inplace=True))
self.add_module(
'conv',
nn.Conv3d(num_input_features,
num_output_features,
kernel_size=1,
stride=1,
bias=False))
self.add_module('pool', nn.AvgPool3d(kernel_size=2, stride=2))
class DenseNet_3d(nn.Module):
"""Densenet-BC model class
Args:
growth_rate (int) - how many filters to add each layer (k in paper)
block_config (list of 4 ints) - how many layers in each pooling block
num_init_features (int) - the number of filters to learn in the first convolution layer
bn_size (int) - multiplicative factor for number of bottle neck layers
(i.e. bn_size * k features in the bottleneck layer)
drop_rate (float) - dropout rate after each dense layer
num_classes (int) - number of classification classes
"""
def __init__(self,
growth_rate=32,
block_config=(6, 12, 24, 16),
num_init_features=64,
bn_size=4,
drop_rate=0,
num_classes=1000):
super().__init__()
# First convolution
self.features = nn.Sequential(OrderedDict([
('conv1',nn.Conv3d(1,num_init_features,
kernel_size=(7, 7, 7),
stride=(2, 2, 2),
padding=(3, 3, 3),
bias=False)),
('norm1', nn.BatchNorm3d(num_init_features)),
('relu1', nn.ReLU(inplace=True)),
('pool1', nn.MaxPool3d(kernel_size=3, stride=2, padding=1))]))
# Each denseblock
num_features = num_init_features
for i, num_layers in enumerate(block_config):
block = _DenseBlock_3d(num_layers=num_layers,
num_input_features=num_features,
bn_size=bn_size,
growth_rate=growth_rate,
drop_rate=drop_rate)
self.features.add_module('denseblock{}'.format(i + 1), block)
num_features = num_features + num_layers * growth_rate
if i != len(block_config) - 1:
trans = _Transition_3d(num_input_features=num_features,num_output_features=num_features // 2)
self.features.add_module('transition{}'.format(i + 1), trans)
num_features = num_features // 2
# Final batch norm
self.features.add_module('norm5', nn.BatchNorm3d(num_features))
for m in self.modules():
if isinstance(m, nn.Conv3d):
m.weight = nn.init.kaiming_normal(m.weight, mode='fan_out')
elif isinstance(m, nn.BatchNorm3d) or isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
# Linear layer
self.classifier = nn.Linear(num_features, num_classes)
for m in self.modules():
if isinstance(m, nn.Conv3d):
nn.init.kaiming_normal_(m.weight,
mode='fan_out',
nonlinearity='relu')
elif isinstance(m, nn.BatchNorm3d):
nn.init.constant_(m.weight, 1)
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.Linear):
nn.init.constant_(m.bias, 0)
def forward(self, x):
features = self.features(x)
out = F.relu(features, inplace=True)
out = F.adaptive_avg_pool3d(out, output_size=(1, 1, 1))
out = torch.flatten(out,1)
out = self.classifier(out)
return out
densenet121_3d = DenseNet_3d(num_init_features=64, growth_rate=32, block_config=(6, 12, 24, 16))
densenet169_3d = DenseNet_3d(num_init_features=64, growth_rate=32, block_config=(6, 12, 32, 32))
densenet201_3d = DenseNet_3d(num_init_features=64, growth_rate=32, block_config=(6, 12, 48, 32))
densenet264_3d = DenseNet_3d(num_init_features=64, growth_rate=32, block_config=(6, 12, 64, 48))
x=torch.randn(1,1,224,224,224)
X=densenet121_3d(x)
print(X.shape) # torch.Size([1, 1000])
import netron
import torch.onnx
import onnx
modelData ='demo.onnx' # 定义模型数据保存的路径
torch.onnx.export(densenet121_3d, x, modelData) # 将 pytorch 模型以 onnx 格式导出并保存
onnx.save(onnx.shape_inference.infer_shapes(onnx.load(modelData)), modelData)
netron.start(modelData)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









