






基于胡寿松主编的《自动控制原理》(第七版)附录的 M A T L A B {\rm MATLAB} MATLAB控制系统简单教程,快速了解 M A T L A B {\rm MATLAB} MATLAB在控制理论的应用,下载链接: MATLAB辅助分析与设计方法基础.
1.控制系统建模
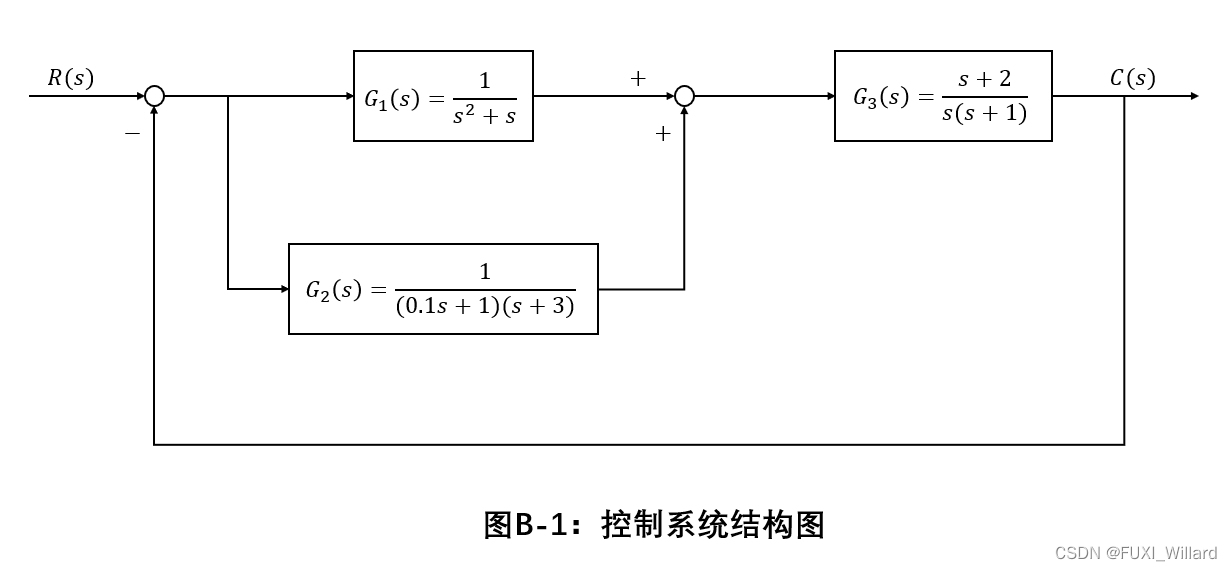
控制系统结构图如下图所示:
-
控制系统模型描述
-
系统传递函数模型描述
命令格式:sys=tf(num,den,Ts) 参数说明: num:分子多项式降幂排列的系数向量; den:分母多项式降幂排列的系数向量; Ts:采样时间,缺省时描述连续传递函数;图B-1的G1(s)描述:G1=tf([1],[1 1 0])传递函数分子、分母为因式连乘形式,采用conv命令进行多项式相乘, 得到展开后的分子、分母多项式降幂排列的系数向量,再用tf命令建模; 图B-1的G2(s): num=1; den=conv([0.1 1],[1 3]); G2=tf(num,den) -
系统零极点模型描述
命令格式:sys=zpk(z,p,k,Ts) 参数说明: z:系统零点; p:系统极点; k:系统增益; Ts:采样时间; 注:若无零、极点,则用[]表示;Ts缺省时描述连续系统;图B-1的G3(s)描述:G3=zpk([-2],[0 -1],1)
-
-
模型转换
传递函数模型与零极点模型之间的转换命令; 命令格式:[num,den]=zp2tf(z,p,k) # zp2tf:将零极点模型转换成传递函数模型; 命令格式:[z,p,k]=tf2zp(num,den) # tf2zp:将传递函数模型转换成零极点模型;图B-1的G1(s)模型转换成零极点模型为:[z,p,k]=tf2zp([1],[1 1 0]) 图B-1的G3(s)模型转换成传递函数模型为:[num,den]=zp2tf([-2],[0 -1],1) -
系统连接
-
系统的并联连接
命令格式:sys=parallel(sys1,sys2) 图B-1的G1和G2并联,描述为:G12=parallel(G1,G2) -
系统的串联连接
命令格式:sys=series(sys1,sys2) 图B-1的G12和G3串联,描述为:G=series(G12,G3) -
系统的反馈连接
命令格式:sys=feedback(sys1,sys2,sign) 注:sign用于说明反馈性质,sign缺省时为负,即sign=-1; 图B-1为单位负反馈系统,闭环传递函数描述: sys=feedback(G,1,-1) 参数说明: G:开环传递函数; 1:单位反馈; -1:负反馈;
-
-
实例分析
E x a m p l e B − 1 {\rm ExampleB-1} ExampleB−1: 已知多回路反馈系统如下图所示,求闭环系统的传递函数 C ( s ) / R ( s ) C(s)/R(s) C(s)/R(s)。

解:
% exampleB_1.m % 各传递函数的建立 G1=tf([1],[1 10]); G2=tf([1],[1 1]); G3=tf([1 0 1],[1 4 4]); numg4=[1 1];deng4=[1 6];G4=tf(numg4,deng4); % 各反馈传递函数的建立 H1=zpk([-1],[-2],1); numh2=[2];denh2=[1];H3=1; nh2=conv(numh2,deng4);dh2=conv(denh2,numg4); H2=tf(nh2,dh2); % 将H2移至G4之后 % 进行系统连接(简化) sys1=series(G3,G4); sys2=feedback(sys1,H1,+1); % 由G3,G4,H1回路组成的子系统 sys3=series(G2,sys2); sys4=feedback(sys3,H2); % 计算由H2构成的反馈子系统 sys5=series(G1,sys4); sys=feedback(sys5,H3) % 计算反馈主回路的系统闭环传递函数% result sys = 0.083333 (s+1)^2 (s+2) (s^2 + 1) --------------------------------------------------------- (s+10.12) (s+2.44) (s+2.349) (s+1) (s^2 + 1.176s + 1.023) Continuous-time zero/pole/gain model.
















 893
893











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











