







本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶技术概览》书籍的笔记。
5.汽车线控系统技术
5.1 概述
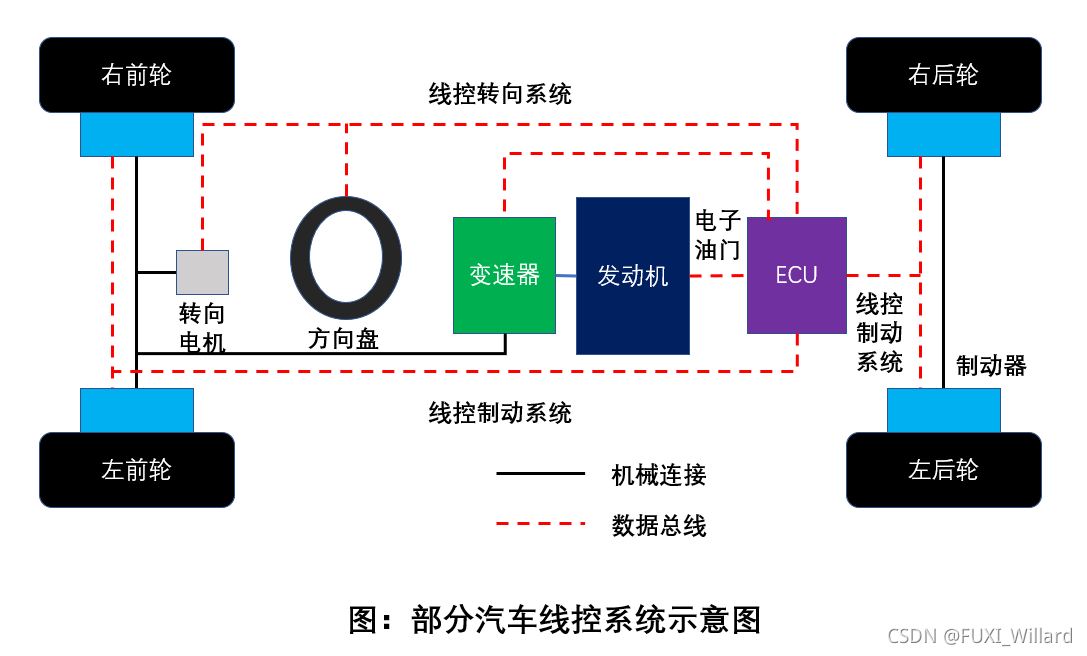
汽车线控技术:将驾驶员的操纵动作经过传感器转变为电信号,通过电缆直接传输到执行机构的一种系统;汽车线控技术包括:线控转向系统、线控油门系统、线控制动系统、线控悬架系统、线控换挡系统、线控增压系统;通过分布在汽车各处的传感器实时获取驾驶员的操作意图和汽车行驶过程中的各种参数信息,传递给控制器,控制器将这些信息进行分析和处理,得到合适的控制参数传递给各个执行机构,从而实现对汽车的控制,提高车辆的转向性,动力性,制动性,平顺性;
线控技术的优点:
- 汽车更加轻便。
采用线控系统,舍去传统的机械控制装置,极大减轻汽车的整备质量,降低了汽车的能源消耗,减少了汽车的噪声和振动,传统机械装置去除及电线布置灵活性节省了大量空间,提高驾驶员和乘客的乘坐舒适性,有利于实现模块化的底盘设计; - 控制更为精确。
采用传感器实时收集汽车的各项参数,驾驶员动作的过程,需要调节的程度可以通过传感器准确记录,控制精度高; - 操作更加便捷。
驾驶员仅通过某些按键即可在汽车内部实现一系列复杂的操控,大大降低了操纵复杂性; - 控制策略更加丰富。
可以实现对底盘多个子系统的协调控制,提高汽车的各项性能; - 生产制造更加简单。
简化汽车的生产、装配、调试过程,节约生产成本和开发周期,有利于汽车生产企业根据用户需求的不同进行个性化的定制; - 安全性大大提高。
舍去了传统的转向轴,当汽车发生撞击时,减少机械部件对驾驶员的伤害; - 系统工作效率大大提高。
汽车内部各种信息通过电信号进行传输,极大提高了信息传递的效率,控制更加迅速,响应更加灵敏。
5.2 线控的关键技术
5.2.1 传感器技术
概述:线控系统要做出正确决策必须要有准确的信息作为保障,汽车的车速、发动机转速、进气压力、节气门位置、变速器挡位等信息,都是由传感器获得,传感器的精度和可靠性直接影响整个线控系统的控制效果;微型传感器代表性技术:Mems技术,利用微电子机械加工技术将微米级的敏感元件、信号处理器、数据处理装置封装在同一芯片上,具有体积小、价格便宜、可靠性高等特点,可以提高系统测试精度。
5.2.2 容错控制技术
概述:为了提高汽车可靠性和安全性,汽车线控系统必须采取容错控制,即:当有些部件出现故障或失效时,它们在系统中的功能可以用系统中其他部件部分或完全代替,使系统能继续保持规定的性能或不丧失最基本的功能,或进一步实现故障系统的性能最优;
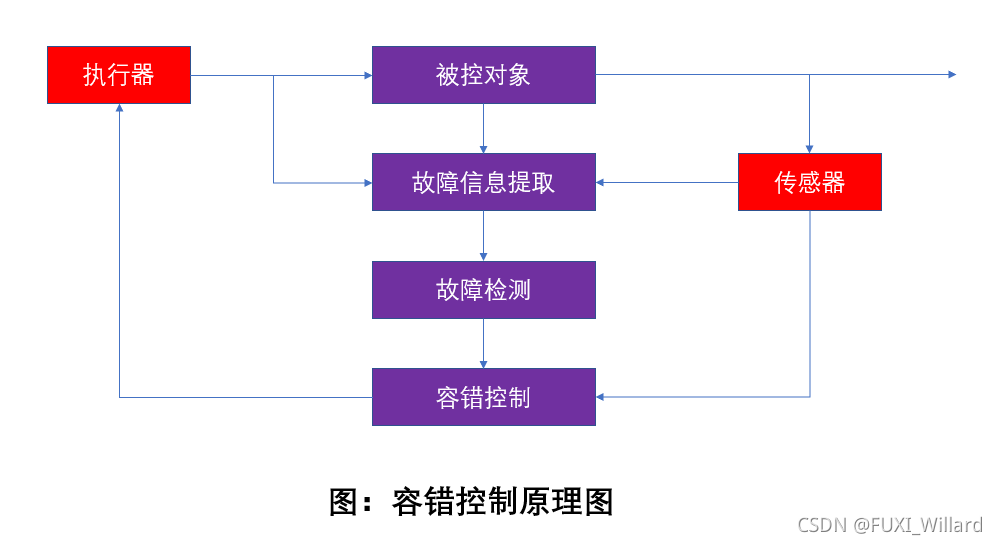
容错控制系统控制原理:系统收集来自执行器、被控对象和传感器传来的故障信息,进行故障检测,然后把检测结果传输到容错控制器,由容错控制器对控制系统进行修正;
容错控制分为:被动容错控制、主动容错控制;
- 被动容错控制:
- 定义:在不改变控制器和系统结构条件下,从鲁棒控制思想出发设计控制系统,使其对故障不敏感;
- 特点:不管故障发生不发生,都采用不变的控制器保证闭环系统对特定的故障具有鲁棒性;
- 被动控制不需要故障诊断单元,不需要任何实时的故障信息;
- 分类:
- 可靠镇定;
- 联立镇定;
- 完整性镇定;
- 主动容错控制:
- 定义:在故障发生后根据故障情况对控制器的参数重新调整,甚至改变结构;
- 特点:主动容错控制对发生的故障能够进行主动处理;
- 主动容错控制需要设计较多的控制算法,能够更大限度地提高控制系统的性能。
5.2.3 汽车行驶状态和参数估计
概述:汽车线控系统的实现需要很多汽车行驶状态和参数的保障,这些参数一部分通过传感器获得,如:车速,发动机转速,方向盘转角等,很多参数无法通过传感器直接获得,如:路面的附着系数,制动时轮胎的滑移率,前后轮侧偏角,车轮纵/侧垂向力等;针对汽车行驶状态和参数做的研究:采用线性观测器,鲁棒观测器,滑模观测器,龙贝格观测器,卡尔曼滤波算法进行估计和预测;
5.2.4 汽车网络技术
概述:
传统网络:基于事件的网络通信协议,当几个信息同时发送时,往往会造成网络交通拥挤,会造成某些信息延迟;
当前网络:基于时间触发的网络通信协议,在明确定义时间点去执行操作,各线控系统同步后,每个系统在一个特定的时间窗口传送自己的信息,不必去竞争总线,提高了数据传输速率和可靠性;
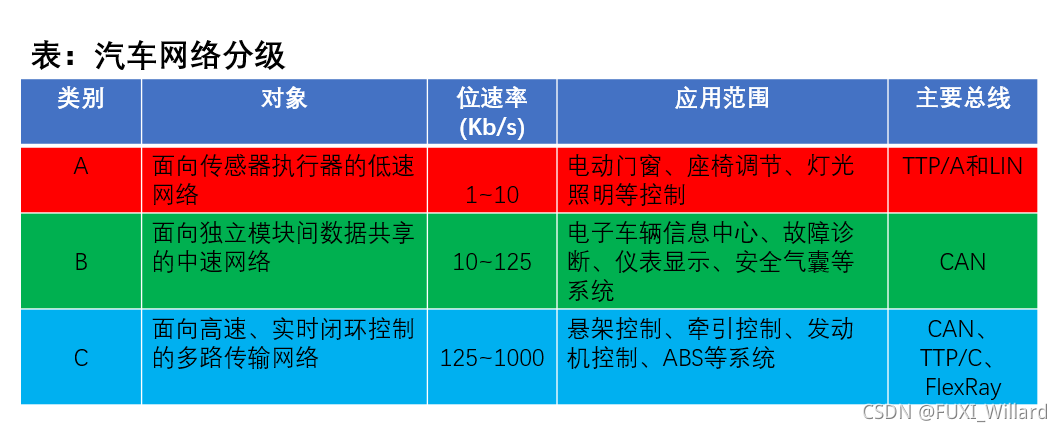
SAE对汽车网络等级的划分:
应用广泛的两个时间触发网络通信协议:TTP/C、FlexRay;
- TTP/C(Time Triggered Protocol SAE Class C):基于时间触发的、集成的、有容错功能的实时网络通信协议,以TDMA为媒体访问方式,Class C代表符合汽车工程师协会(SAE)的C类标准;
- TTP/C网络是由一系列连接到两个冗余通道上的节点构成;
- 两个冗余通道被称为通道0和通道1,每个通道都包含一条TTP总线;
- 一个TTP/C网络和与此相关的节点被称为簇(cluster);
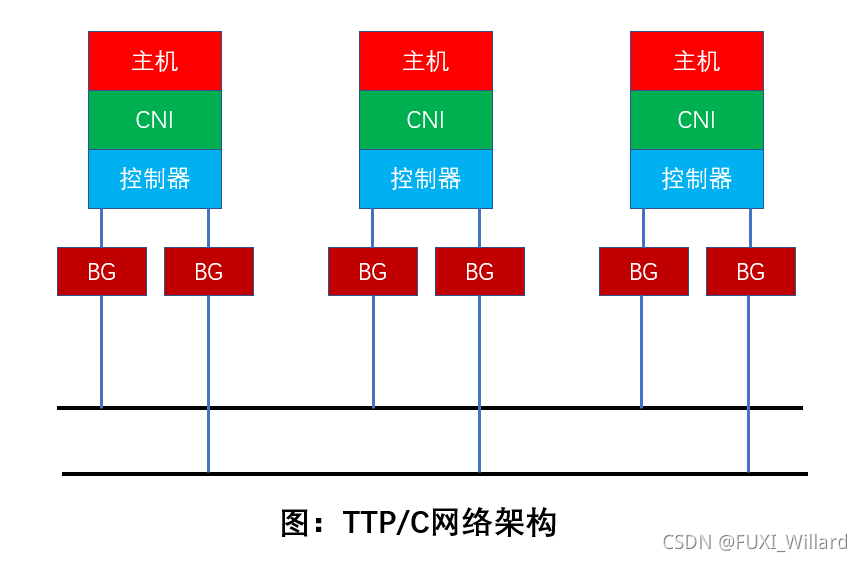
- 典型的TTP/C由主机、主机和协议控制器接口CNI(Communication Network Interface)、TTP/C协议控制器和总线保护器BG(Bus Guardian)构成;
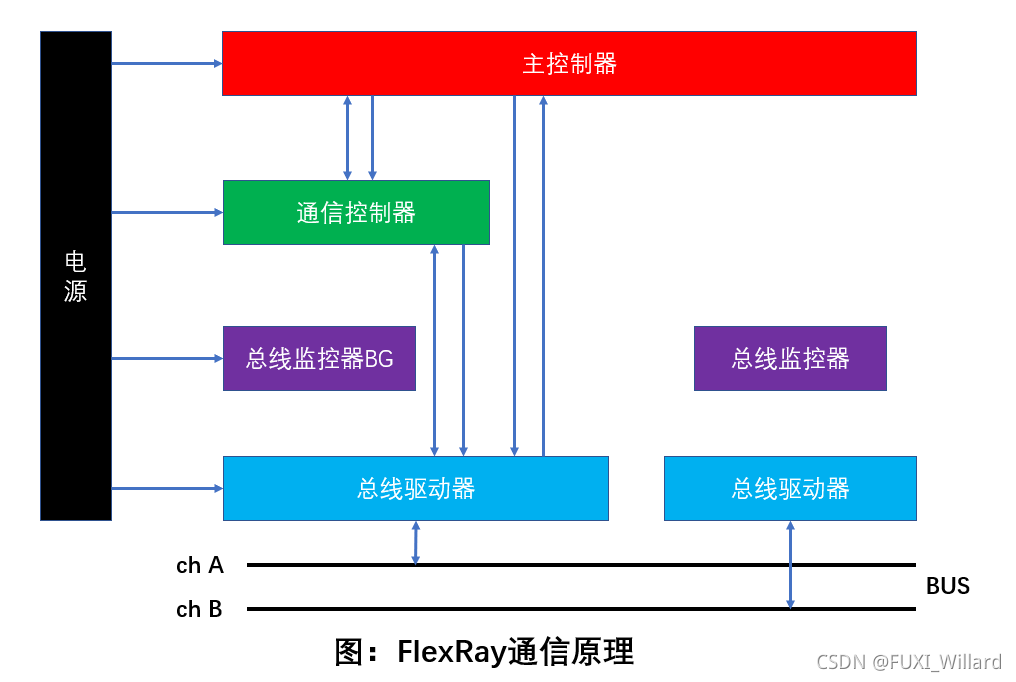
- FlexRay通信原理:ECU(Electronic Control Unit),即节点node,是接入车载网络中的独立完成相应功能的控制单元;主处理器提供和产生数据,通过FlexRay通信控制器传送出去;FlexRay支持时间触发访问方式,也支持时间触发访问方式;ECU组成:
- 电源供给系统(Power Supply);
- 主控制器(Host);
- 固化FlexRay通信控制器(Communication Controller);
- 可选总线监控器(Bus Guardian);
- 总线驱动器(Bus Driver);
5.3 典型线控系统(仅作简单介绍)
典型线控系统:
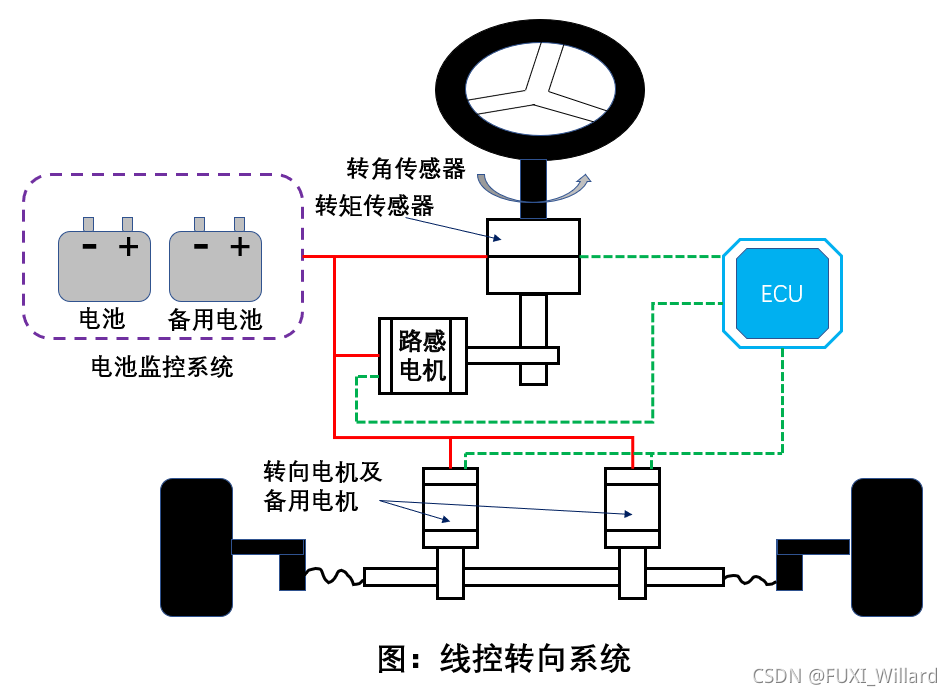
- 线控转向;
- 线控油门;
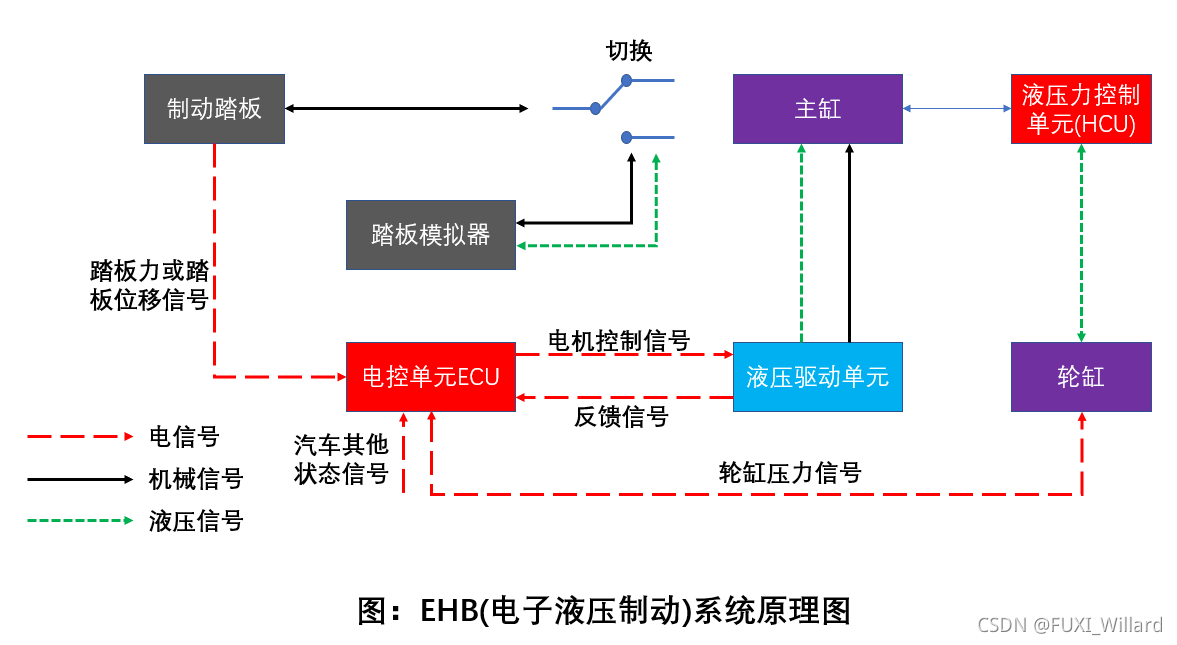
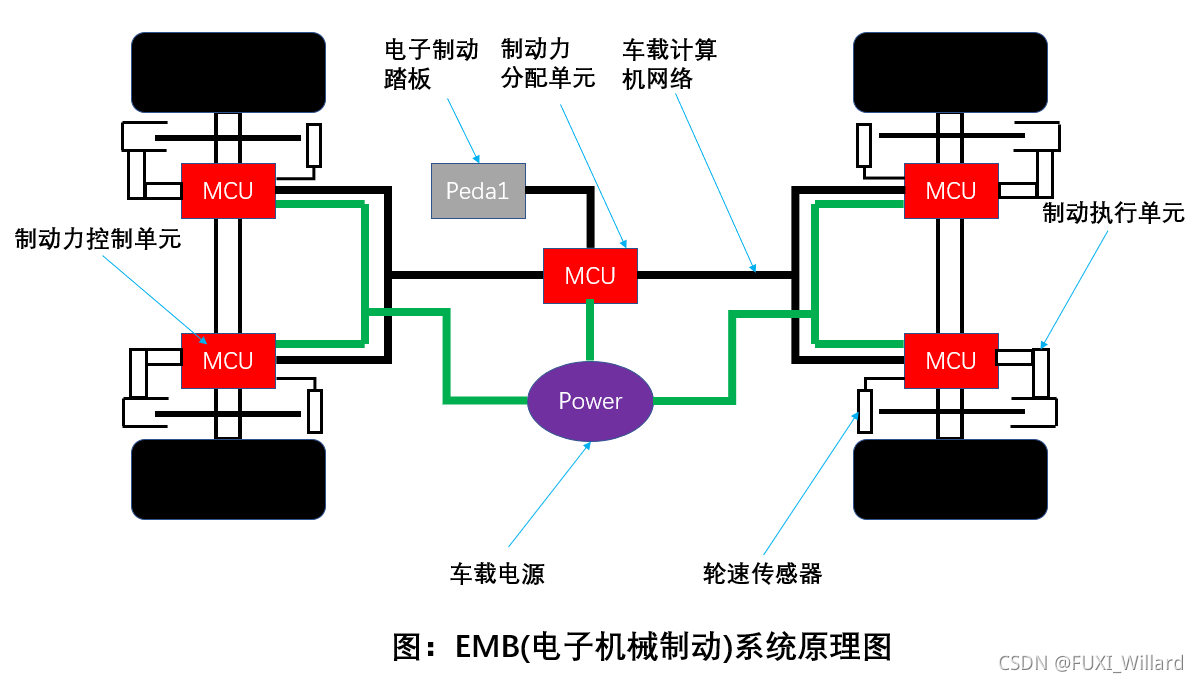
- 线控制动;
注:此篇涉及到汽车构造,请读者自主去学习汽车构造相关,笔者仅简单介绍一些和汽车构造相关的名词。


















 383
383

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











