







 本文介绍了如何使用状态机解析UART的不定长度协议帧,强调了在中断服务程序(ISR)中处理状态机的优势,以及提供了一个C语言代码示例。
本文介绍了如何使用状态机解析UART的不定长度协议帧,强调了在中断服务程序(ISR)中处理状态机的优势,以及提供了一个C语言代码示例。
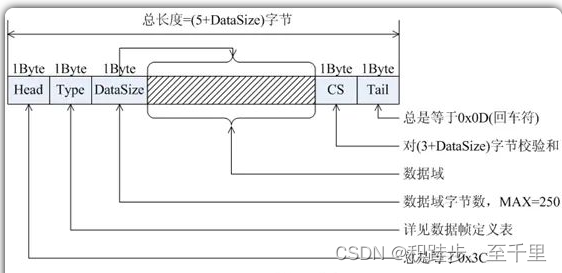
通信设计中考虑协议的灵活性,经常把协议设计成“不定长度”。如果一个系统接收上述“不定长度”的协议帧,将会有一个挑战–如何高效接收与解析。一个实例如下图:米LoRa终端的通信协议帧。
为简化系统设计,我们强烈建议您采用“状态机”来解析UART数据帧,并且把解析工作放在ISR(中断服务程序)完成,仅当接收到最后一个字节(0x0D)时,再将整个数据帧提交给进程处理。
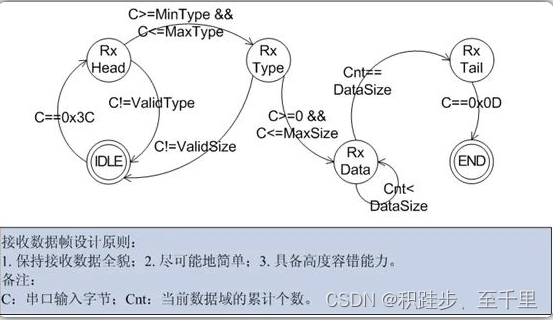
那么ISR处理这个状态机来得及吗?答案是:so easy!因为它只有3个动作,运算量十分小:
比较接收数据 -> 更新状态变量 -> 存储接收数据,C语言仅3条语句,翻译成机器指令也不超过10条。
1. 数据帧格式
2. 状态机原理
3. 代码实现
将 comm2trm_RxUartData()函数放在你的串口中断函数中:
// 变量定义
#define MAX_LEN_COMM_TRM_DATA 12 // 单包最长数据长度
#define MAX_LEN_UART_FRAME_DATA 12 // 有效数据长度
#define COMM_TRM_HEAD 0x3C //帧头
#define COMM_TRM_TAIL 0x0d // 帧尾
#define TYPE_INVALID_MIN 0x01 // 帧种类起始
#define TYPE_INVALID_MAX 0x0a // 帧种类结束
typedef enum
{
STATUS_IDLE = (uint8_t)0,
STATUS_HEAD, /* Rx Head=0x3C */
STATUS_TYPE, /* Rx Type */
STATUS_DATA, /* Data filed */
STATUS_TAIL, /* Tail=0x0D */
STATUS_END, /* End of this frame */
} COMM_TRM_STATUS_TypeDef;
typedef struct
{
uint8_t byCnt; /* Count of 1 field */
uint8_t byDataLen; /* Length of data field */
uint8_t byFrameLen; /* Length of frame */
COMM_TRM_STATUS_TypeDef eRxStatus;
uint8_t a_byRxBuf[MAX_LEN_COMM_TRM_DATA];
} COMM_TRM_DATA;
static COMM_TRM_DATA s_stComm2TrmData;
// 状态机
void comm2trm_RxUartData(uint8_t byData)
{
/* Update status according to the received data */
switch (s_stComm2TrmData.eRxStatus)
{
case STATUS_IDLE:
if (COMM_TRM_HEAD == byData) /* Is Head */
{
s_stComm2TrmData.eRxStatus = STATUS_HEAD;
}
else
{
goto rx_exception;
}
break;
case STATUS_HEAD:
if (TYPE_INVALID_MIN < byData && byData < TYPE_INVALID_MAX) /* Valid type */
{
s_stComm2TrmData.eRxStatus = STATUS_TYPE;
}
else
{
goto rx_exception;
}
break;
case STATUS_TYPE:
if (byData <= MAX_LEN_UART_FRAME_DATA) /* Valid data size */
{
s_stComm2TrmData.eRxStatus = STATUS_DATA;
s_stComm2TrmData.byDataLen = byData;
}
else
{
goto rx_exception;
}
break;
case STATUS_DATA:
if (s_stComm2TrmData.byCnt < s_stComm2TrmData.byDataLen)
{
++s_stComm2TrmData.byCnt;
}
else
{
s_stComm2TrmData.eRxStatus = STATUS_TAIL;
}
break;
case STATUS_TAIL:
if (COMM_TRM_TAIL == byData)
{
/* We received a frame of data, now tell process to deal with it! */
//process_poll(&Comm2TrmProcess);
printf("frame is over \r\n");
}
else
{
goto rx_exception;
}
break;
default:
printf("Error: Bad status of comm2trm_RxUartData().\r\n");
break;
}
/* Save the received data */
s_stComm2TrmData.a_byRxBuf[s_stComm2TrmData.byFrameLen++] = byData;
return;
rx_exception:
//ClearCommFrame();
return;
}

















 898
898











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











