









本篇博文主要来回答为何多旋翼无人机控制使用的是串级PID而非单级PID这一问题。
我们可以从如下几个角度来解释这个问题:
1.输出反馈和状态反馈
首先,以无人机的姿态通道为例,系统的状态变量为姿态角和姿态角速度,对于这样的一个多变量系统,如果系统的状态反馈不全的话很可能导致系统控制性能变差甚至不稳定(实际使用单环PID控制进行实测时能明显感觉到动态性能比较差,振荡较大,阻尼较小,增加D性能提升有限甚至会导致系统发散);单级PID相当于输出反馈(只将系统的姿态角反馈回前端),串级PID可看作状态反馈(两个状态变量均反馈回控制器前端);输出反馈的反馈值只反映了系统状态的一部分,不能完全表征系统的状态变化量,所以控制性能比状态反馈差。
2.PD控制和速度反馈
串级PID和单级PID最大的区别在于级联PID引入了内回路,这个内回路的作用可以从PD控制器与速度控制器的角度来阐述。
首先来看一个简单的PD控制器用于控制二阶系统的例子,系统的框图如下所示:
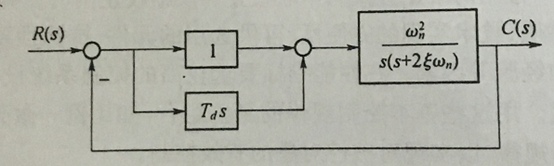
由上图可知,系统的开环传递函数为:
G ( s ) = ω n 2 ( T d s + 1 ) s ( s + 2 ξ ω n ) = K ( T d s + 1 ) s ( s 2 ξ ω n + 1 ) G(s)=\frac{\omega_{n}^{2}\left(T_{d} s+1\right)}{s\left(s+2 \xi \omega_{n}\right)}=\frac{K\left(T_{d} s+1\right)}{s\left(\frac{s}{2 \xi \omega_{n}}+1\right)} G(s)=s(s+2ξωn)ωn2(Tds+1)=s(2ξωns+1)K(Tds+1)
式中 K = ω n 2 ζ K=\frac{\omega_{n}}{2 \zeta} K=2ζωn为开环增益,闭环传递函数为:
Φ ( s ) = ω n 2 ( T d s + 1 ) s 2 + 2 ζ d ω n s + ω n 2 \Phi(s)=\frac{\omega_{n}^{2}\left(T_{d}s+1\right)}{s^{2}+2 \zeta_{d}\omega_{n} s +\omega_{n}^{2}} Φ(s)=s2+2ζdωns+ωn2ωn2(Tds+1)
式中,等效阻尼比 ζ d \zeta_{d} ζd为:
ζ d = ζ + 1 2 T d ω n \zeta_{d}=\zeta+\frac{1}{2} T_{d \omega_{n}} ζd=ζ+21Tdωn
由此可见,PD环节调整了系统的阻尼比 ( ζ d > ζ ) \left(\zeta_{d}>\zeta\right) (ζd>ζ),这将使得系统的动态过程超调量下降,调节时间变短,同时开环增益 K = ω n 2 ζ K=\frac{\omega_{n}}{2 \zeta} K=2ζωn保持不变,即PD控制器不改变系统的稳态精度,也不改变系统的无阻尼振荡频率。由于其在二阶系统中增加了一个闭环零点,因此不能用经典的二阶系统性能公式来计算其时域性能指标。但是,我们可以通过调整微分环节的时间常数 T d T_{d} Td来使系统获得良好的动态性能。
采用速度反馈控制二阶系统的框图如下所示

其中 K t K_t Kt为速度反馈系数,可知上述系统的开环传递函数为:
G ( s ) = ω n 2 s ( s + 2 ζ ω n + K t ω n 2 ) = K s ( s 2 ζ ω n + K t ω n 2 + 1 ) G(s)=\frac{\omega_{n}^{2}}{s\left(s+2 \zeta \omega_{n}+K_{t} \omega_{n}^{2}\right)}=\frac{K}{s\left(\frac{s}{2 \zeta \omega_{n}+K_{t} \omega_{n}^{2}}+1\right)} G(s)=s(s+2ζωn+Ktωn2)ωn2=s(2ζωn+Ktωn2s+1)K
式中 K = ω n 2 ζ + K t ω n K=\frac{\omega_{n}}{2 \zeta+K_{t} \omega_{n}} K=2ζ+Ktωnωn为系统的开环增益。可知,速度反馈使系统的开环增益减小了,这将会降低系统的稳态精度。
相应的其闭环传递函数为:
Φ ( s ) = ω n 2 s 2 + 2 ζ t ω n s + ω n 2 \Phi(s)=\frac{\omega_{n}^{2}}{s^{2}+2 \zeta_{t} \omega_{n} s+\omega_{n}^{2}} Φ(s)=s2+2ζtωns+ωn2ωn2
式中: ζ t = ζ + 1 2 K t ω n \zeta_{t}=\zeta+\frac{1}{2} K_{t} \omega_{n} ζt=ζ+21Ktωn。可见,引入速度反馈可以使得系统的阻尼比增加,且不改变系统的无阻尼振荡频率,这与PD控制器的作用相同;但值得注意的是,速度反馈的引入使系统的开环增益减小,这将降低系统的稳态精度。因此再加入速度反馈的同时需要适当提高系统的开环增益,以补偿稳态误差的变化。
重要结论:内环的加入相当于增加了系统的阻尼
从具体实现的角度来讲,微分器对输入信号中的高频噪声具有放大作用,而速度反馈中噪声成分很弱,因此速度反馈抗干扰性能由于PD控制器;
因此,从增加系统阻尼,改善系统的动态性能的角度来讲,速度反馈优于PD控制。
一般的,以姿态角控制为例,当系统的角速度信号不可测时,使用单环的PID控制器,为系统加入角度的微分项来增加系统的阻尼比;当系统的角速度信号可测时,使用级联的PID控制,通过引入速度反馈回路增加系统的阻尼比。
拓展
Q:为何串级PID使用的是P-PID而不是PID-PID?
A:虽然从时域来看,微分的引入可以增加系统的阻尼比并改善系统的动态特性;但是从频域来看微分项的引入会增加系统高频段的幅值,这会放大输入信号中的高频噪声,会降低控制器的性能;两个微分项串联更会加剧这一影响。
同样的,控制器的滞后主要来源于积分项,两个积分项串联更会加剧滞后,使控制器的性能下降。















 6227
6227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









