







机器人原点是什么?
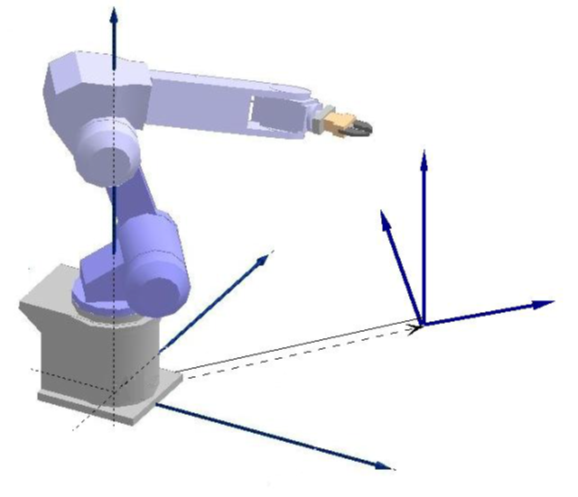
工业机器人原点是机器人运动系统中的核心概念,它为机器人的定位、路径规划和运动控制提供了基准点。原点是指机器人工作空间内的一个固定参考点,所有运动和定位都以该点为基准。系统通过记录电机绝对值编码器的数值,以此作为轴运动的基准,是机器人关节极限和直线运动准确性的参考系。通常工业机器人默认原点位置位于J1轴旋转中心轴与底座安装面的交点上。
原点设定又是什么?
原点设定是将机器人本体的原点数据写入机器人控制器的过程。机器人通过使用该原点数据从而进行坐标运算。如果未进行原点设定,就无法确定机器人动作范围,也就没办法使用机器人。
机器人原点设置错误会导致哪些问题?
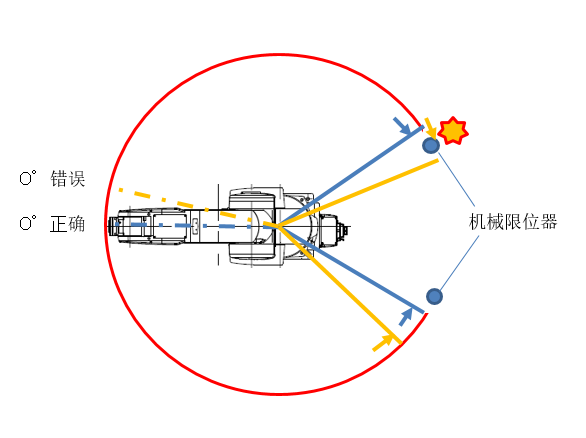
①实际的动作范围错误
原点设置错误的的话,原本的动作范围无法确保,从而可能出现撞机问题。
②机器人坐标系出现倾斜
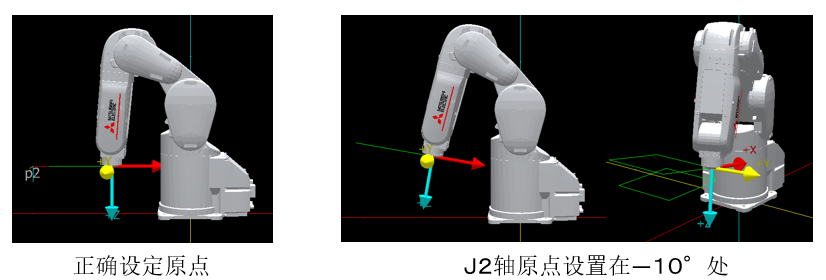
原点设定错误的话,会导致机器人坐标系出现倾斜,导致机器人无法准确走直线、通过坐标位置运算得到的位置精度会变差,以及和视觉传感器配合时得到的位置偏差补偿量也会产生偏差。会对工业机器人的正常使用造成非常大的影响。
下面以6轴机器人J2轴原点故意设置到-10度处,然后机器人往X正方向移动250mm为例进行说明。如下图所示,机器人原点设置错误时,机器人实际会出现倾斜移动。
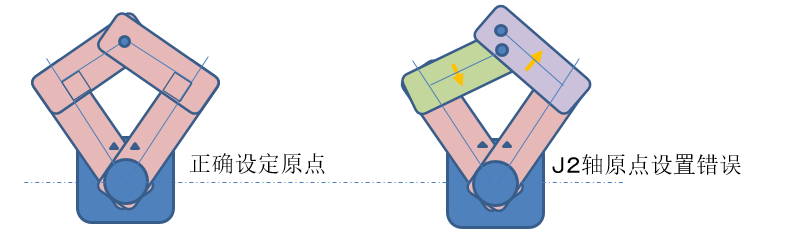
4轴SCARA机器人的话,J2轴原点数据对于坐标系的影响非常大。当J2轴原点设置错误时,即使同一个位置数据,当手系发生变化时,机器人实际移动的位置也会出现较大偏差。
机器人原点设置错误的话,机器人完全无法使用吗?
如果是通过示教再现方式进行机器人编程动作的话,机器人仍然可以使用。只是会出现上述描述的问题,会导致在一些需要绝对位置精度、轨迹精度的场合,机器人会出现较大偏差。

















 3200
3200

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









