







一、创建全局变量点
创建两个全局变量分别用于储存机器人的笛卡尔姿态与关节角姿态。
打开System文件夹中的config文件创建全局变量的点位。
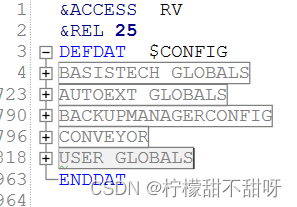
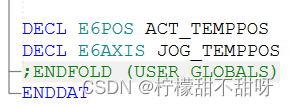
在USER GROBALS用户自定义变量Userdefined variables下创建一个E6POS类型的点位,一个E6AXIS类型的点位。
二、创建回原点的程序
在process文件夹下创建一个名为AUT_HOME的程序

三、添加程序指令
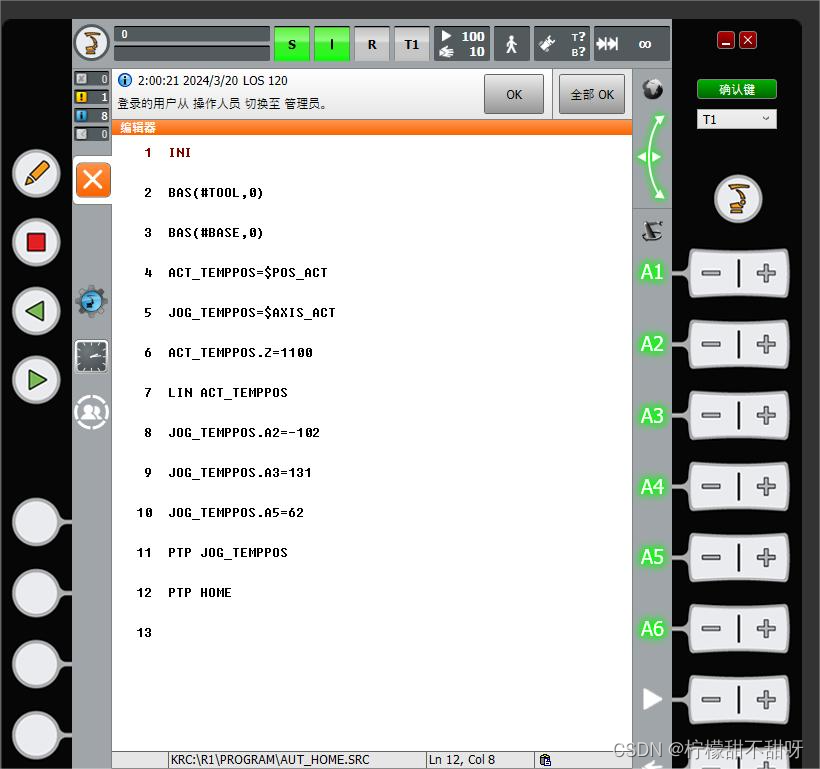
定义当前回原点程序机器人使用的坐标系,案例程序使用默认的工具坐标系和基坐标系。
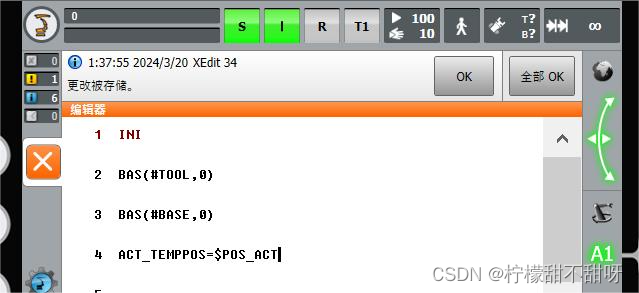
获取机器人当前的笛卡尔坐标系的位姿,KUKA机器人系统变量为$POS_ACT。
获取机器人当前的关节角的位姿,KUKA机器人系统变量为$AXIS_ACT。

对机器人高度Z进行对应的赋值,并运动至该高度。

对机器人需要释放的关节角进行赋值,关节运动机器人。

最后运动至机器人示教的原点位置

总体程序框架如下图所示:














 3506
3506











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









