







文章目录
一、思维导图

二、功能模块描述
1、小车基本移动功能
功能描述:通过电机驱动模块控制小车的前进、后退、左转、右转和停止。
实现方式:通过单片机控制电机驱动模块(如 L298N)实现小车的基本移动。
2、超声波避障功能
功能描述:通过超声波模块(如 HC-SR04)检测前方障碍物的距离,实时调整小车运动方向,避免碰撞。
实现方式:
使用超声波模块测量障碍物的距离。
根据距离判断是否需要停止或转向。
3、循迹功能
功能描述:通过红外循迹传感器(如 TCRT5000)检测黑线轨迹,实现沿轨迹行驶。
实现方式:
两个或三个红外传感器分别检测轨迹位置。
根据检测信号调整小车左右电机的速度或方向。
4、蓝牙控制功能
功能描述:通过蓝牙模块(如 HC-05),用户通过手机 APP 发送控制指令,远程控制小车的动作。
实现方式:
蓝牙模块接收手机发送的指令。
单片机解析指令并控制小车动作。
5、功能优先级逻辑
描述:实现功能之间的优先级逻辑,确保小车在不同场景下能正确执行任务:
如果检测到蓝牙指令,优先执行蓝牙控制。
如果没有蓝牙指令,则执行避障或循迹功能。
二、动力系统
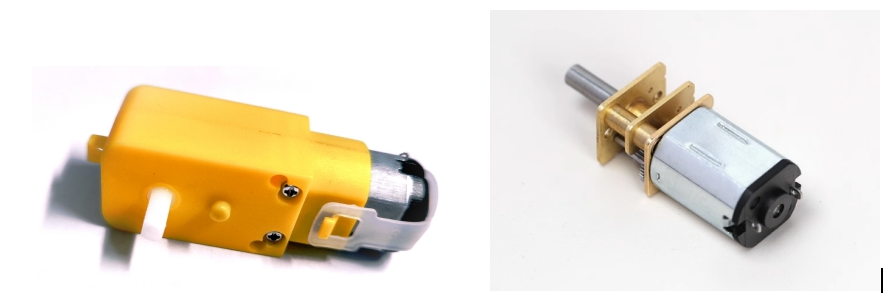
1、马达选型
51单片机小车马达选型一般就是两种:TT马达(如下左图)和N20马达(如下有图)。前者主要是用在各种儿童玩具上,后者的应用就比较广泛,在电子锁,电动牙刷上都有使用。两者之间,主要是在成本和性能之间做权衡。由于我们不仅需要小车动起来,还要精准的操控它,所以这里我们选用精度较高的N20马达。
2、供电模块选型
当马达型号确定以后,我们去查找N20参数,就可以发现N20有3v、6v、12v三个平台。这里我们选用6v平台,其输入电压是5-9v。我们可以选择两节锂电池串联供电:锂电池的放电电压是4.2v-2.5v,刚好在范围之内。
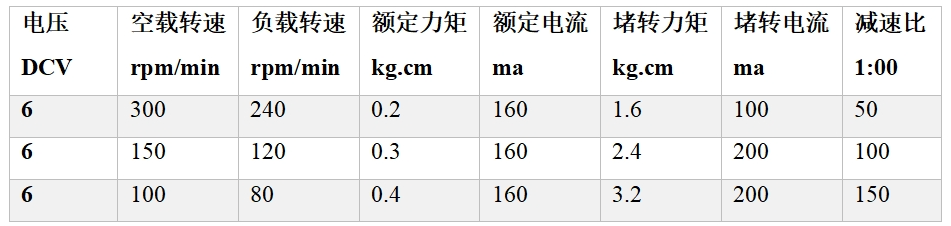
从图中我们可以看到,N20额定电流是160ma,我们采用两个电机,同时满载驱动需要320ma,只要电池放电速度高于这个数,就能够供应电机。为了稳妥起见,这里我们采用容量为2000mah,放电倍率为1C的18650电池,放电电流为2A。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1715
1715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











