








问题以及创新点
同样是在VoxelNet的基础上做了进一步改进
问题
- 直接3D点云的方法,对资源要求比较高
- RGB图像具有更丰富的特征,但在预测深度等存在精度较差的问题
- 当前融合的方法,多是在后期融合,是得场景融合收到限制
创新点
- 融合RGB以及点云进行综合的检测
- 在网络早期进行特征融合
网络架构
整个网络走了两个不同的pipeline,一部分通过Faster-RCNN提取RGB特征信息,另一方面通过VoxelNet提取3D点云特征。并且提出了两种点云融合的方法,PointFusion以及VoxelFusion。
PointFusion
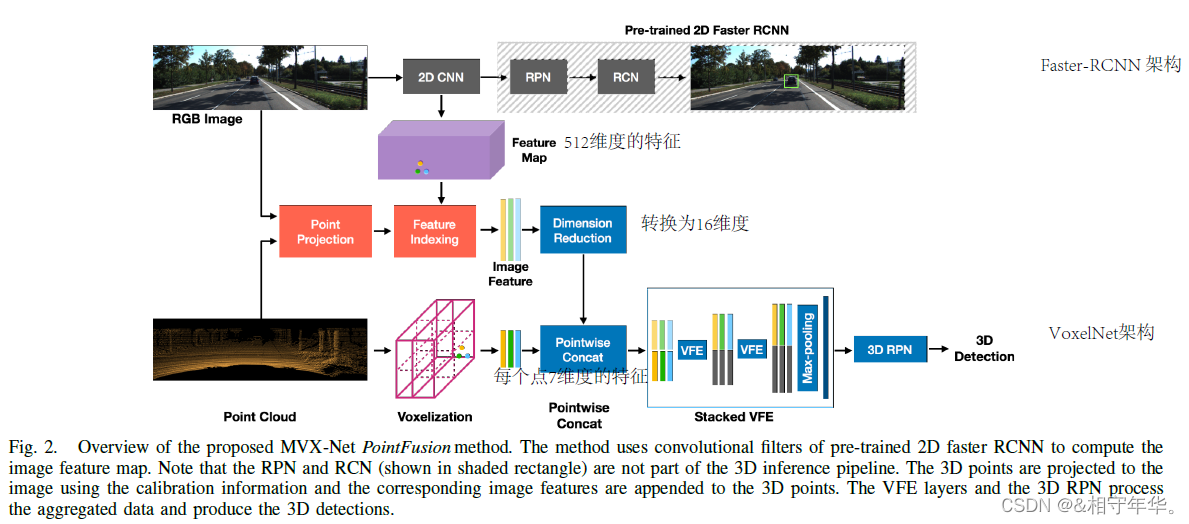
PointFusion 针对voxel中每个点进行特征融合,在原始每个点7维特征 ( x i , y i , z i , r i , x i − v x , y i − v y , z i − v z )
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 587
587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









