






2024 KDD
- 车道级地图不仅需要描绘道路的基本结构和布局,还需要提供车道级的详细信息,包括车道线几何、车道标线风格以及连接拓扑等
- 传统的地图生成解决方案通常成本高昂且劳动密集,因为它们需要经过训练的专家手动注释地理元素
- 为了提高效率并减少人工工作量,借助计算机视觉在地图生成中的进步已成为一种可行的途径。
- 但这些方法在预测精度、后处理逻辑以及处理复杂道路场景(如道路磨损和车辆遮挡)时仍然存在局限性。
- 为了提高效率并减少人工工作量,借助计算机视觉在地图生成中的进步已成为一种可行的途径。
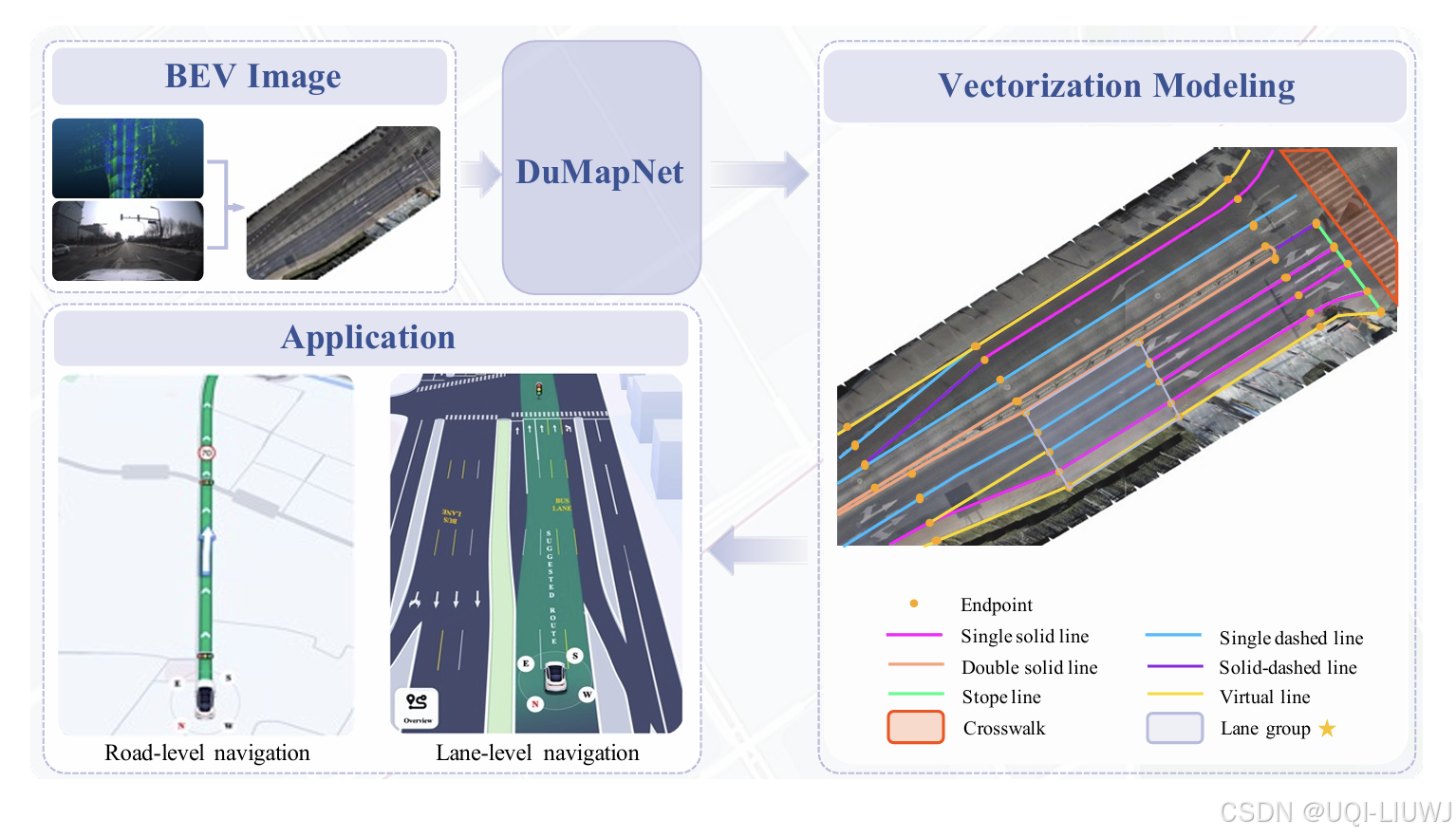
- ——>论文提出了一种自动化的工业级离线解决方案,命名为DuMapNet
- 给定鸟瞰图(BEV)图像,DuMapNet能够将多线条和多边形风格的地图元素统一建模为一组点
- 为了显著提高在道路磨损、遮挡、复杂交叉口等困难场景中的预测效果,并改进帧间矢量化结果的连接,提出了上下文提示编码器(CPE)模块
- 利用当前BEV图像邻域的空间预测结果作为提示信息,CPE显著增强了更大感受野内预测结果的几何和类别一致性
- 为了避免传统多阶段地图制作方法中的误差积累效应和弱泛化问题,并考虑到标准化地图构建的需求,我们设计了基于组的车道预测(GLP)方法,通过车道组多边形与车道线之间的相互约束,输出车道组的矢量化结果,无需复杂的后处理逻辑。
- 为了实现端到端的大规模地图生成模式,我们开发了拓扑预测模块,能够预测BEV图像之间的车道线拓扑关系,实现大规模地图关联。


















 701
701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











