








线段和四边形的交点计算,可以转化为线段和四边形的四条边各自进行交点计算,而线段和线段交点计算的原理已经在之前的一篇博客中介绍过了,这里不再赘述。
为了加快速度,在计算和四条边的交点之前,我们先进行一个快速排斥实验,即判断线段的最小包围盒是否和四边形的最小包围盒相交,若不相交,则无需再进行交点的计算,可节省下相等一部分的计算量。
以下是python代码实现:
import geopandas
from shapely import geometry
import operator
import matplotlib.pyplot as plt
def findIntersection(x1, y1, x2, y2, x3, y3, x4, y4): #求直线交点
t=((x1-x2)*(y3-y4)-(y1-y2)*(x3-x4))
if t!=0: #有交点
px = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / t
py = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / t
return [px,py]
else:
return None
def findLineIntersection(p1,p2,p3,p4): #求线段p1p2和线段p3p3的交点
x1,y1=p1
x2,y2=p2
x3,y3=p3
x4,y4=p4
#
t = ((x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4))
if t != 0: # 有交点
px = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / t
py = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / t
if px>=min(x1,x2) and px<=max(x1,x2) and px>=min(x3,x4) and px<=max(x3,x4): #交点在线段上
return [px, py]
else:
return None
else:
return None
def isIntersect(line,parallelogram):
l1,l2=line
p1,p2,p3,p4=parallelogram
x1,x2=min(l1[0],l2[0]),max(l1[0],l2[0])
y1,y2=min(l1[1],l2[1]),max(l1[1],l2[1]) #线段的最小包围盒
x3,x4=min(p1[0],p2[0],p3[0],p4[0]),max(p1[0],p2[0],p3[0],p4[0])
y3,y4=min(p1[1],p2[1],p3[1],p4[1]),max(p1[1],p2[1],p3[1],p4[1]) #四边形的最小包围盒
#
if x1<=x4 and x3<=x2 and y1<=y4 and y3<=y2:
return True
else:
return False
def findParallelogramIntersection(line,parallelogram): #求线段和平行四边形的交点
if not isIntersect(line,parallelogram):
#未通过快速排斥实验,一定不相交
print("未通过快速排斥实验")
return []
l1,l2=line
p1,p2,p3,p4=parallelogram
cp1=findLineIntersection(l1,l2,p1,p2)
cp2=findLineIntersection(l1,l2,p2,p3)
cp3=findLineIntersection(l1,l2,p3,p4)
cp4=findLineIntersection(l1,l2,p4,p1)
old_cps=[]
if cp1:
old_cps.append(cp1)
if cp2:
old_cps.append(cp2)
if cp3:
old_cps.append(cp3)
if cp4:
old_cps.append(cp4)
#print(old_cps)
cps=[]
for cp in old_cps:
if cp not in cps:
cps.append(cp)
#print(cps)
return cps
if __name__=="__main__":
line=[(-1,-1),(9,-5)]
parallelogram=[(0,1),(2,1),(4,3),(2,3)]
ax=geopandas.GeoSeries(geometry.LineString(line)).plot(color='r')
geopandas.GeoSeries(geometry.Polygon(parallelogram)).plot(ax=ax)
points=findParallelogramIntersection(line,parallelogram)
print(points)
assert len(points)<=2
if len(points)==2:
geopandas.GeoSeries([geometry.Point(points[0]),geometry.Point(points[1])]).plot(ax=ax,color='r')
plt.show()
结果
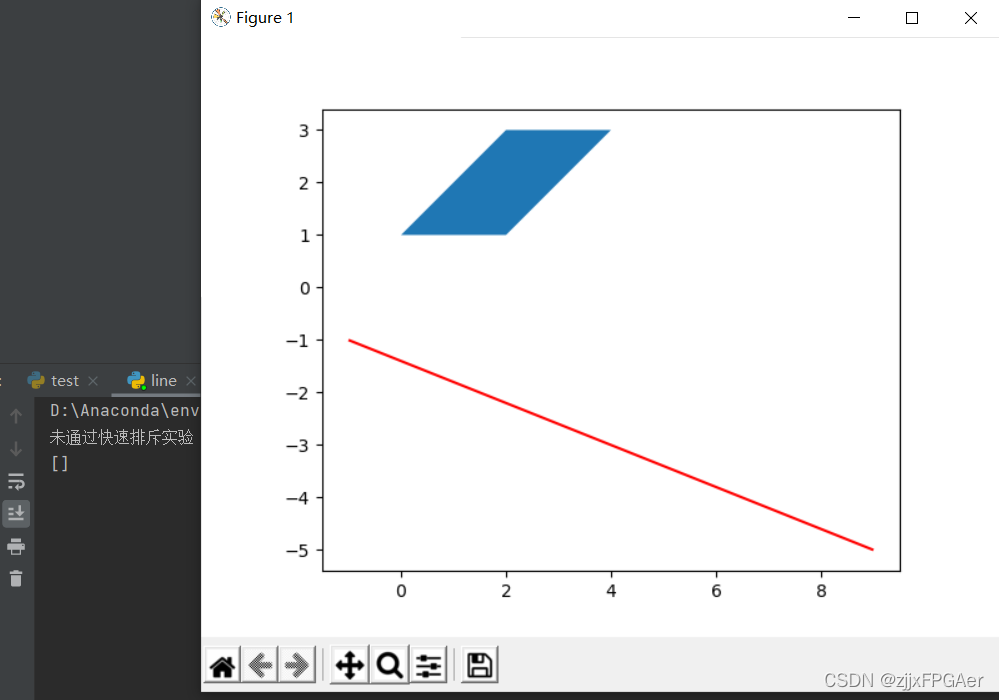
1.未通过快速排斥实验的情况
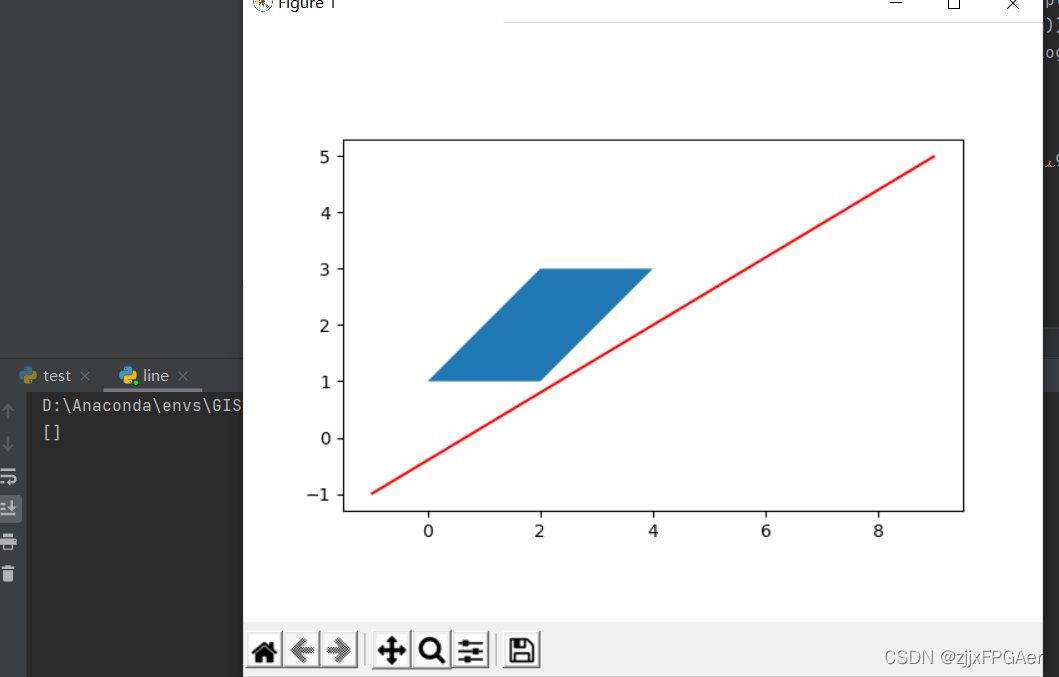
2.通过快速排斥实验但没交点
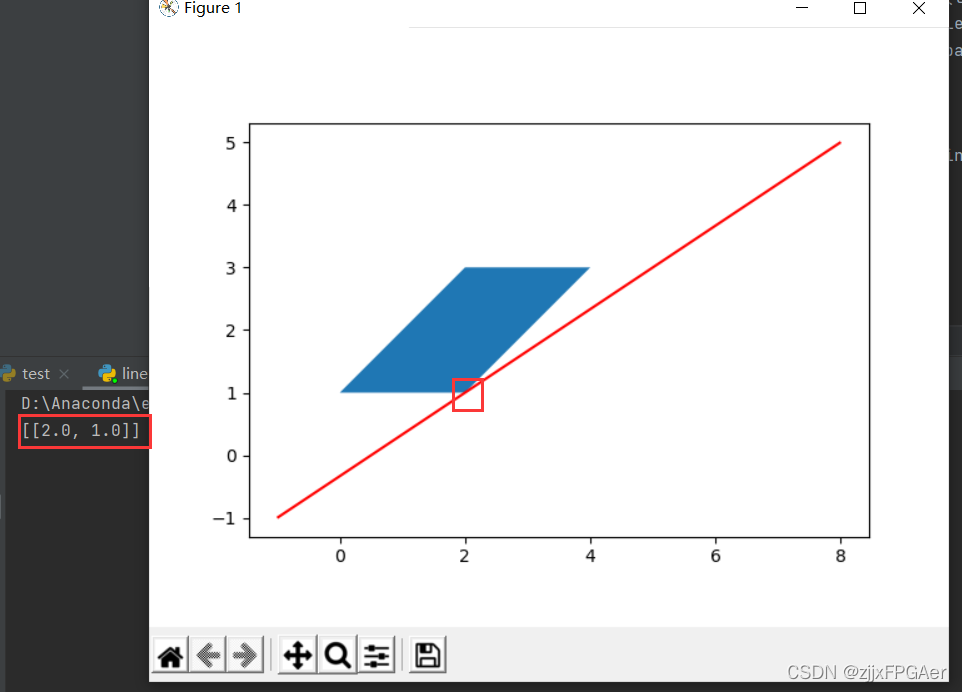
3.有一个交点
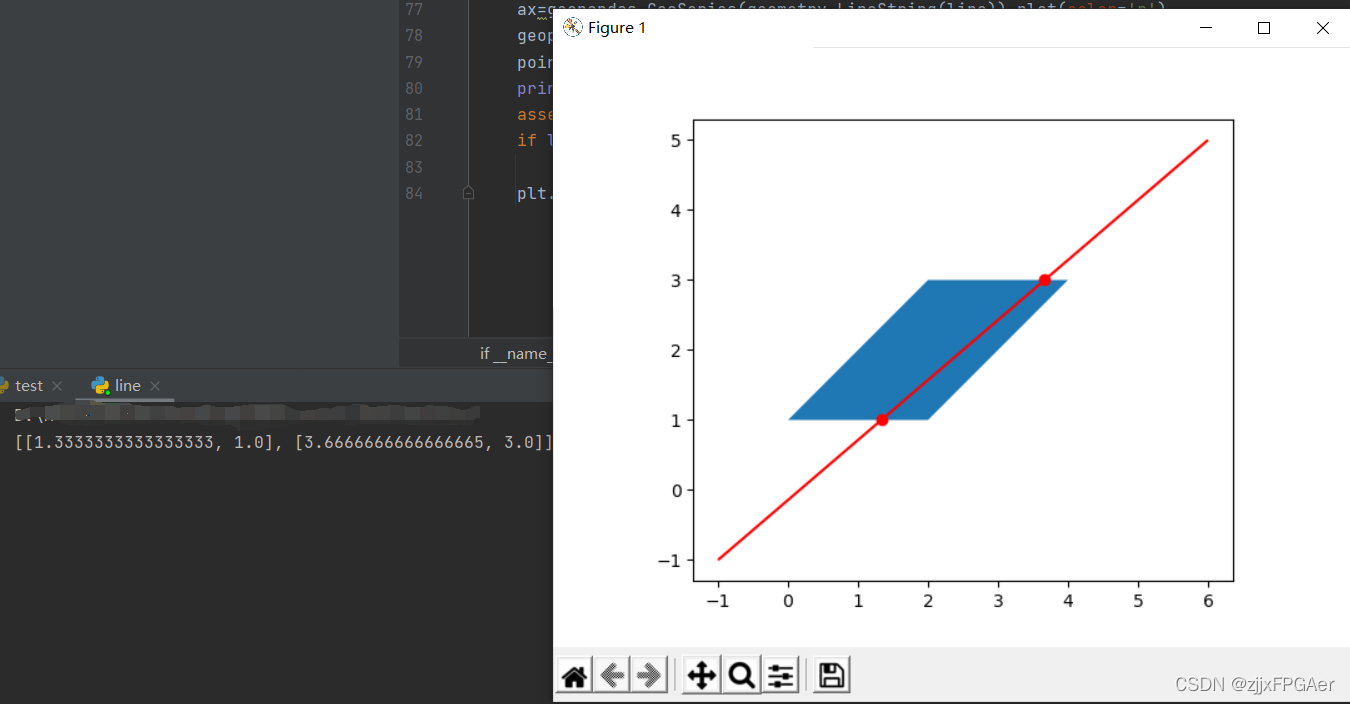
4.两个交点
改进
之前的代码,由于计算机在表示数据时存在误差,因此有时会发生错误(当四边形的某条边垂直或平行于X轴时),现加入了一个误差容忍因子eps,解决了这个问题。代码如下
import geopandas
from shapely import geometry
import operator
import matplotlib.pyplot as plt
def findIntersection(x1, y1, x2, y2, x3, y3, x4, y4): #求直线交点
t=((x1-x2)*(y3-y4)-(y1-y2)*(x3-x4))
if t!=0: #有交点
px = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / t
py = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / t
return [px,py]
else:
return None
def findLineIntersection(p1,p2,p3,p4): #求线段p1p2和线段p3p3的交点
eps=1e-6
x1,y1=p1
x2,y2=p2
x3,y3=p3
x4,y4=p4
#
t = ((x1 - x2) * (y3 - y4) - (y1 - y2) * (x3 - x4))
if t != 0: # 有交点
px = ((x1 * y2 - y1 * x2) * (x3 - x4) - (x1 - x2) * (x3 * y4 - y3 * x4)) / t
py = ((x1 * y2 - y1 * x2) * (y3 - y4) - (y1 - y2) * (x3 * y4 - y3 * x4)) / t
if px>=min(x1,x2)-eps and px<=max(x1,x2)+eps and px>=min(x3,x4)-eps and px<=max(x3,x4)+eps and \
py>=min(y1,y2)-eps and py<=max(y1,y2)+eps and py>=min(y3,y4)-eps and py<=max(y3,y4)+eps: #交点在线段上
return [px, py]
else:
return None
else:
return None
def isIntersect(line,parallelogram):
l1,l2=line
p1,p2,p3,p4=parallelogram
x1,x2=min(l1[0],l2[0]),max(l1[0],l2[0])
y1,y2=min(l1[1],l2[1]),max(l1[1],l2[1]) #线段的最小包围盒
x3,x4=min(p1[0],p2[0],p3[0],p4[0]),max(p1[0],p2[0],p3[0],p4[0])
y3,y4=min(p1[1],p2[1],p3[1],p4[1]),max(p1[1],p2[1],p3[1],p4[1]) #四边形的最小包围盒
#
if x1<=x4 and x3<=x2 and y1<=y4 and y3<=y2:
return True
else:
return False
def findParallelogramIntersection(line,parallelogram): #求线段和平行四边形的交点
if not isIntersect(line,parallelogram):
#未通过快速排斥实验,一定不相交
#print("未通过快速排斥实验")
return []
l1,l2=line
p1,p2,p3,p4=parallelogram
cp1=findLineIntersection(l1,l2,p1,p2)
cp2=findLineIntersection(l1,l2,p2,p3)
cp3=findLineIntersection(l1,l2,p3,p4)
cp4=findLineIntersection(l1,l2,p4,p1)
old_cps=[]
if cp1:
old_cps.append(cp1)
if cp2:
old_cps.append(cp2)
if cp3:
old_cps.append(cp3)
if cp4:
old_cps.append(cp4)
#print(old_cps)
cps=[]
for cp in old_cps:
if cp not in cps:
cps.append(cp)
#print(cps)
return cps
if __name__=="__main__":
line=[(-1,-1),(6,5)]
parallelogram=[(0,1),(2,1),(4,3),(2,3)]
ax=geopandas.GeoSeries(geometry.LineString(line)).plot(color='r')
geopandas.GeoSeries(geometry.Polygon(parallelogram)).plot(ax=ax)
points=findParallelogramIntersection(line,parallelogram)
print(points)
assert len(points)<=2
if len(points)==2:
geopandas.GeoSeries([geometry.Point(points[0]),geometry.Point(points[1])]).plot(ax=ax,color='r')
plt.show()


















 2992
2992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











