







一、介绍
1、本文主要介绍惯性导航的主要实现,适用于有一定的惯性导航基础的人员学习。
2、本文的核心内容均来自严恭敏老师的《捷联惯导算法与组合导航原理讲义》。
3、希望读者了解陀螺和加速度计的原理,并且有一定的c语言基础。
二、正文
1、惯性导航设备通过采集陀螺和加速度计的数据来进行导航解算,最终的目的是得到设备自身的速度、位置、姿态等信息。
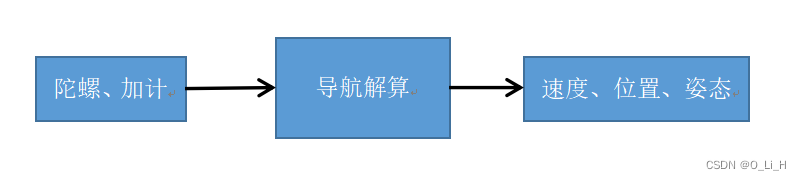
2、怎么由陀螺和加计的数据得到速度、位置和姿态的呢,这就是本文的核心。主要分为一下几个步骤:
步骤一:周期性采集陀螺和加计数据,得到原始数据;
步骤二:对采集的原始数据进行标定,得到标定数据;
步骤三:对标定数据进行导航解算,得到速度、位置、姿态。
3、本文主要针对步骤三进行说明

因为存在不可交换误差,所以需要利用角增量构造等效旋转矢量。
等效旋转矢量微分方程的泰勒级数解 :
方法1 单子样算法:

方法2 单子样+前一周期算法:

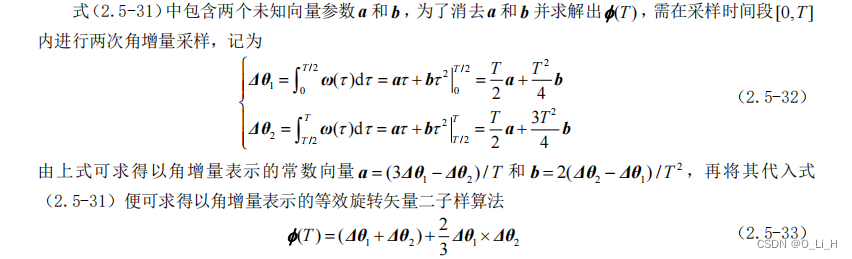
方法3 二子样算法:
方法4 三子样算法:

值得注意的是,在实际应用中并不是采样数越多越好:

在实际应用中大多采样 “单子样+前一周期” 与 “二子样算法”。
作者将对 “单子样+前一周期” 与 “二子样算法” 进行详细说明,并以C语言的方法进行实现。
















 1067
1067











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









