







PID控制
本文利用通俗易懂的话句介绍了PID各参数调节对控制系统的影响。另外介绍了Matlab Simulink中PID 模块的使用与各种变化。
1、PID控制器
PID控制器由比例(Proportional)环节、积分(Integral)环节、微分(Differential)环节三个环节组成,PID控制器的运动方程为: m ( t ) = K P e ( t ) + K I ∫ 0 t e ( t ) d t + K D d ( e ( t ) ) d t m(t)=K_Pe(t)+K_I\int_0^te(t)dt+K_D\frac{d(e(t))}{dt} m(t)=KPe(t)+KI∫0te(t)dt+KDdtd(e(t))传递函数为: G ( s ) = K p + K I s + K D s G(s)=K_p+\frac{K_I}{s}+K_Ds G(s)=Kp+sKI+KDs K P , K I , K D K_P,K_I,K_D KP,KI,KD分别为以上三个环节的系数。
2、PID参数调节规律
(1) 比例—— K P K_P KP
比例环节为一个常数,所以旨在放大控制系统的偏差,其能够使控制系统进行快速的响应。所以其参数调节有以下特征:
- 调节过小:控制作用过小,系统响应过慢
- 调节过大:控制作用大,系统响应快,但系统稳定性差(微小的误差就会检测到并进行调节,所以肯定稳定性差)
但纯比例环节是无法消除偏差的。
(2) 比例环节的个人理解:
比例环节相当于个放大镜的作用,告诉系统这个偏差大,让系统本身来自己调节,但系统本来自己有误差,所以还是消不掉的
(3) 积分—— K I K_I KI
通过运动方程里的积分环节可以看出,积分环节的含义是对于偏差信号在时间上进行积分,所以有偏差积分环节就会一直进行作用,而 K I K_I KI的作用也是相当于放大了这个积分后的信号,其参数调节有以下特征:
-调节过小:积分作用小,系统稳定慢
-调节过大:积分作用大,振荡强
(4) 积分环节的个人理解:
积分环节就相当于“力做功”,只不过这个“力”就是“偏差信号”,所以加入积分环节的话就相当于给了一个力进行修正,一有误差我就使用“力”。给予“力”的大小的衡量就相当于 K I K_I KI,所以有以下解释:
- K I K_I KI过小,说明一有误差我可以给的“力”小,所以做的功把它拉回正轨花费的时间也越多,后续造成的结果就是系统稳定的慢。
- K I K_I KI过大,说明一有误差我可以给的“力”大,尽管能够把它很快拉回正轨,但是由于使得“力”太大了,有时由于“惯性”太大了到另一边了,设置拉到另一边太过了,所以又得拉一次,反反复复(也就是振荡)。
(5) 微分—— K D K_D KD
通过运动方程里的微分环节可以看出,微分环节为偏差信号的变化率,而 K I K_I KI的作用也是相当于偏差信号的变化,本质其实类似于比例环节(个人见解),但作用比比例环节猛,其偏差一旦变化就可以作用,所以其参数调节有以下特征:
- 调节合适:减小系统超调量,克服振荡,加快系统的响应时间,减小调节时间
- 调节过大:系统不稳定(理由同比例环节),另外,就是微分环节S对应的Bode图的斜率为20dB,所以调节过大会造成系统高频分量过多,而噪声基本处在高频,故系统容易受到噪声的干扰。
(6) 微分环节的个人理解:
微分环节参数 K D K_D KD也是相当于个放大镜的作用,但不同的是它放大的是偏差变化率,同样的是系统稳态误差它是不起作用的。
(7) 总结
- 比例环节——放大镜:放大偏差信号
- 积分环节——“力做功”
- 微分环节——放大镜:放大偏向信号的变化率
另外的话大家也可以结合文章PID参数理解中的动图来看
3、Matlab Simulink中PID模块的表达
(1)Matlab自带模块
pid模块示意图:
pid模块内部参数设置
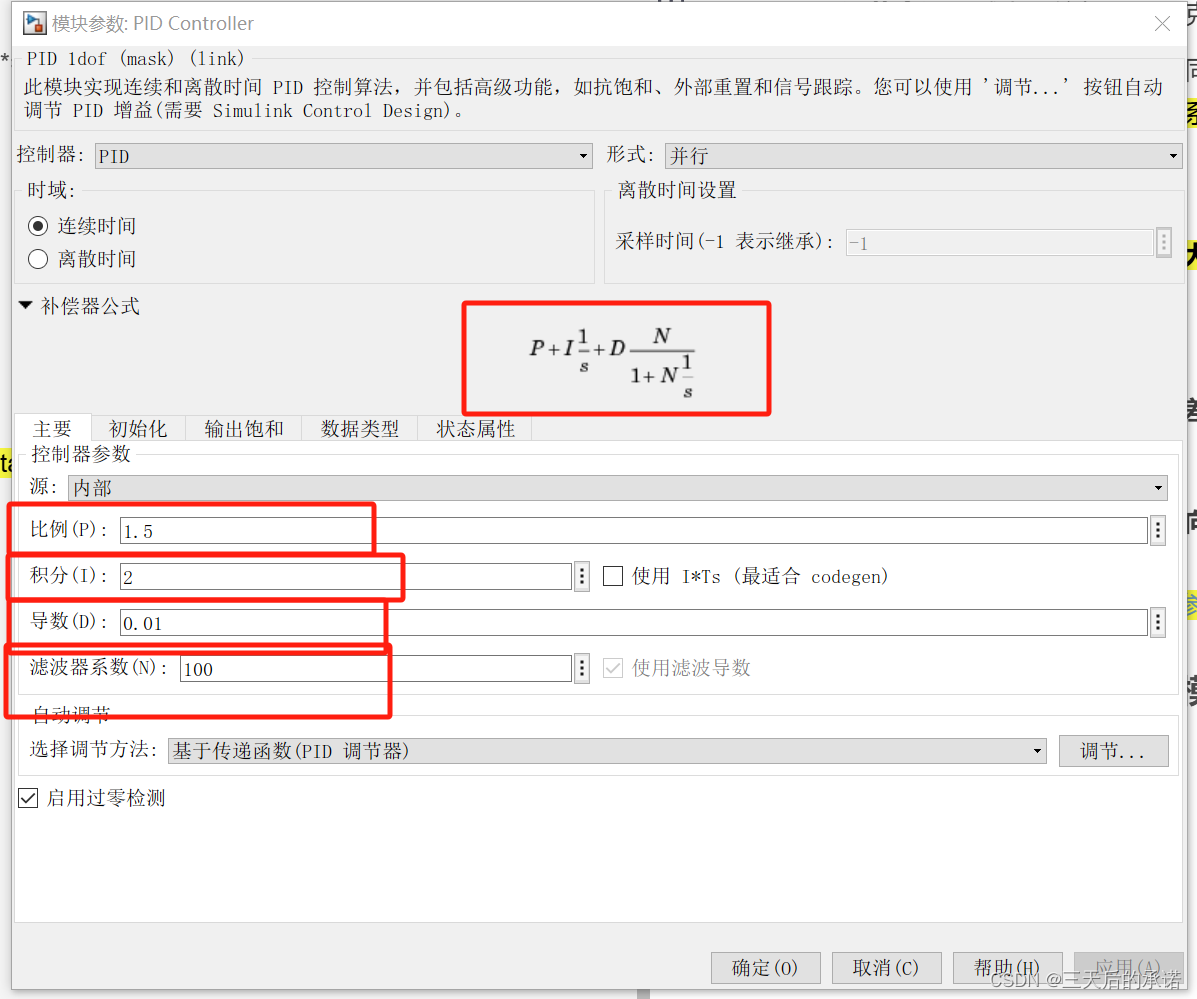
可以发现simulink自带的与咱们书上的PID模块的微分环节不同,但其实影响不大,当
N
N
N取较大值,即是
s
s
s。下图展示下PID环节MATLAB的不同版本:
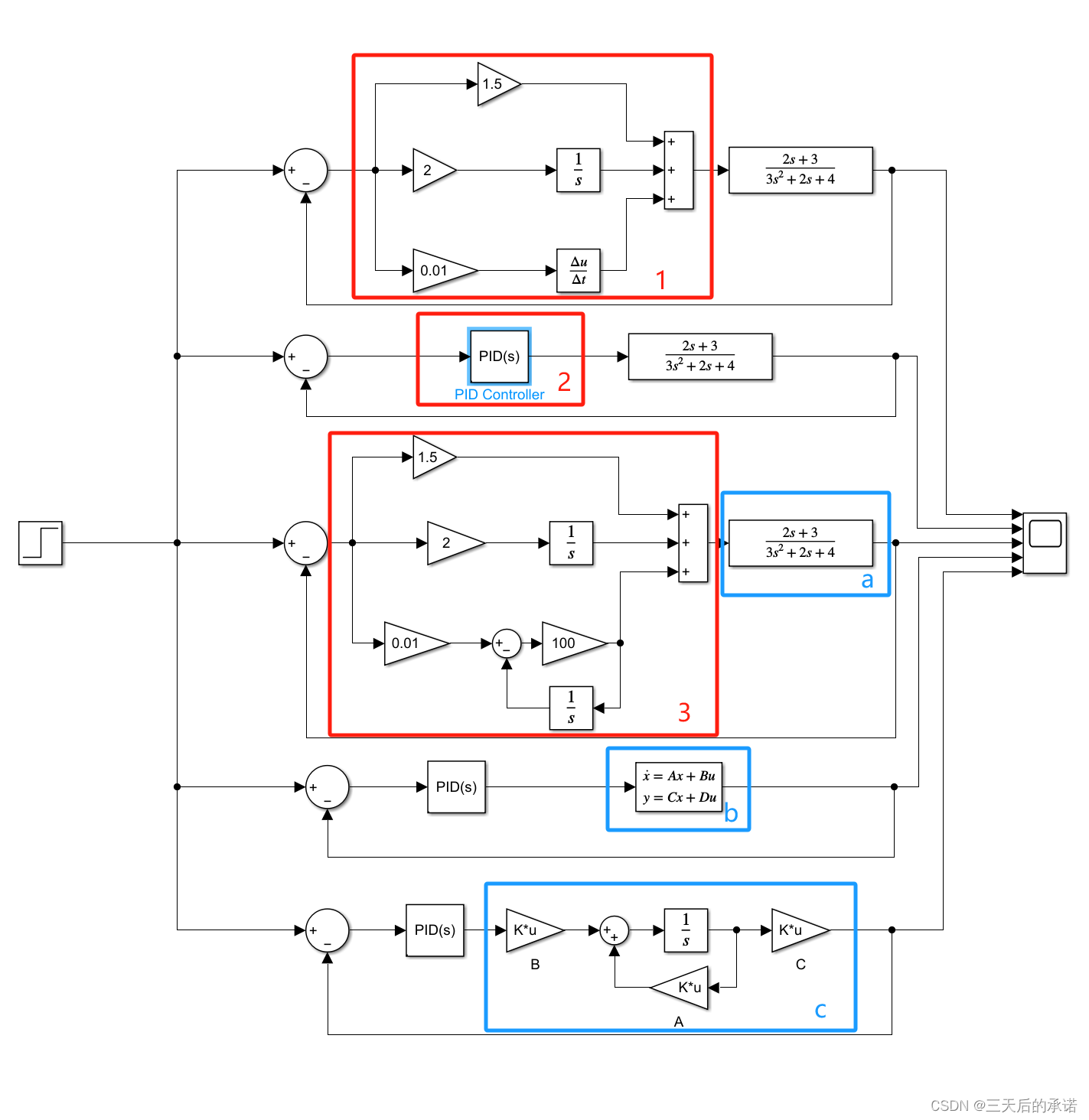
其中1、2、3均为PID控制器,但形式不同。其中,1为标准的PID控制器,2为simulink自带的PID控制器模块,3为2的简单模块复写。
另外,a、b、c均为同一对象的不同表达。其中a为传递函数形式,b和c为传递函数经串联分解后的状态空间表达形式,只不过其中b为simulink自带的模块,c为b的简单模块复写。传递函数转状态空间方程后的具体形式如下: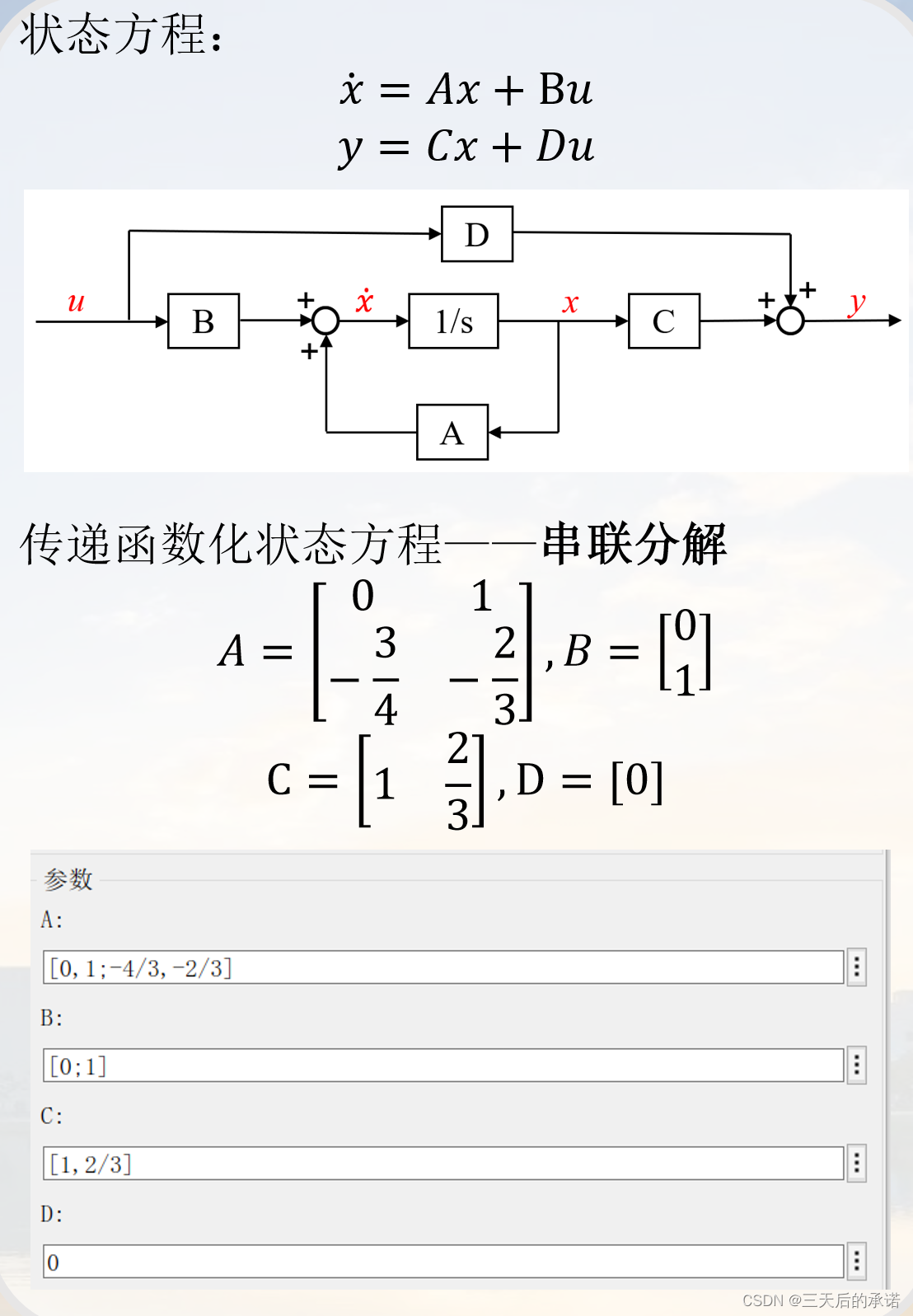
















 1183
1183

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











