






FMCW雷达之间可能存在干扰,雷达A发射的电磁波被雷达B接收到,并且落在了B的通带内,就会对B造成干扰。今天探讨的是正负调频斜率的两个雷达之间的干扰。假设雷达A的斜率是正的
雷达A的正斜率调频信号
其中代表快时间域,
代表慢时间域,
代表初相,
为chirp起始频点,
是正斜率雷达A相对于负斜率雷达B产生的多普勒速度,
为调频斜率
假设雷达B的斜率是负的
雷达B负斜率调频信号
代表正负斜率调频信号频率重合部分的带宽,
为负斜率雷达的初相
假设雷达A的发射的信号,被雷达B接收并处理。
雷达B混频后的低通信号
欧拉分解
进行R维FFT后
即
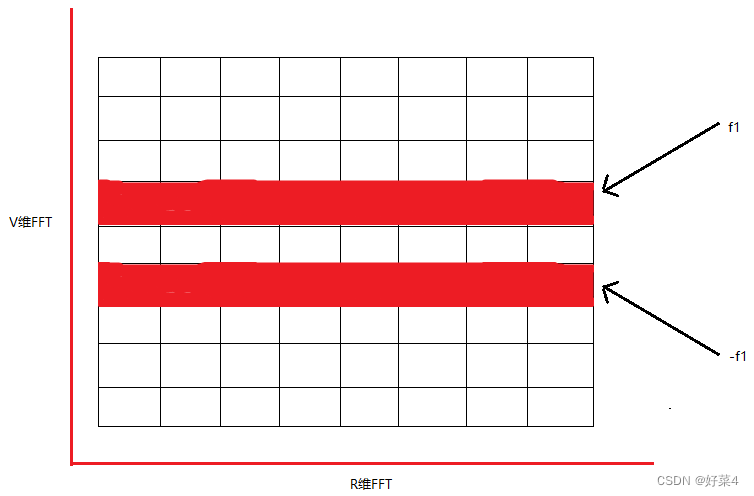
进行2维FFT后
可以看到当不等于0时,在V维将出现两个多普勒速度,分别是
、
多普勒频率对应的, 在每个速度处,在R维将出现一条贯穿整个R谱的、带宽为
的信号。















 721
721

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









