







第一章
1、六大元件:
比较元件、校正元件、放大元件、执行元件、测量反馈元件、被控对象
2、分类:
(1)形式:开环、闭环、复合(扰动、输入)
(2)变化规律:恒值、随动、程序控制
(3)连续:连续、离散
(4)动态方程:线性、非线性
3、指标:
稳定、快速、准确
4、形式:
单调收敛、单调发散、震荡收敛、震荡发散、等幅振荡
第二章
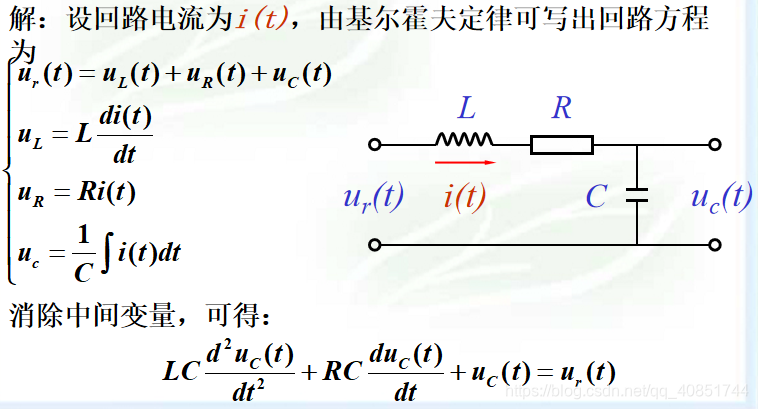
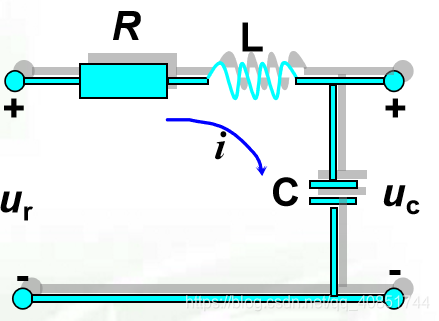
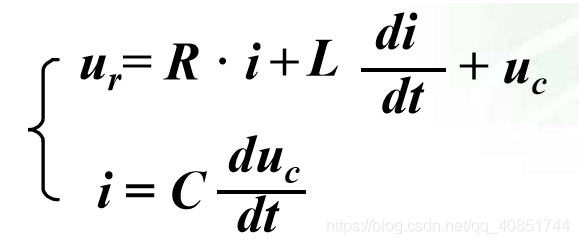
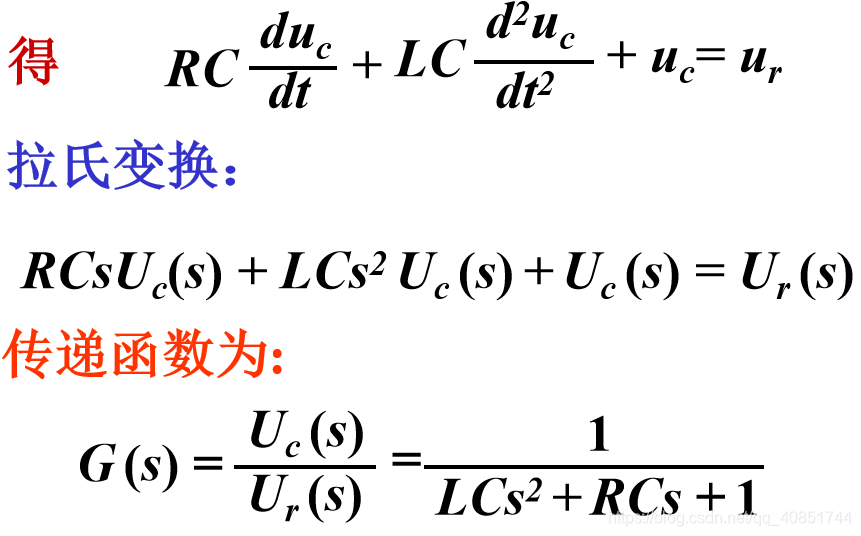
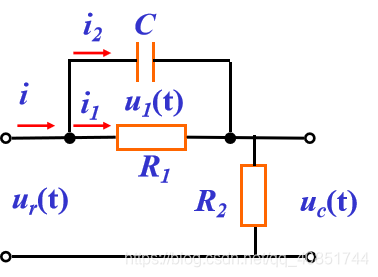
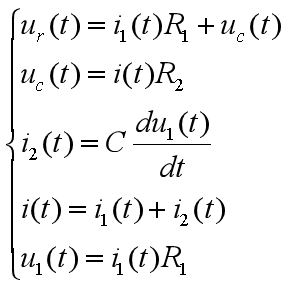
1、电阻R、电容C、电感 L组成的电路如图所示,试写出以ur(t)为输入量、uc(t)为输出量的电路微分方程。
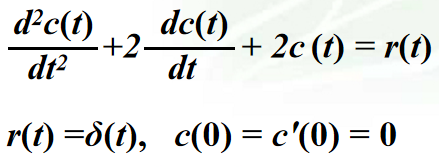
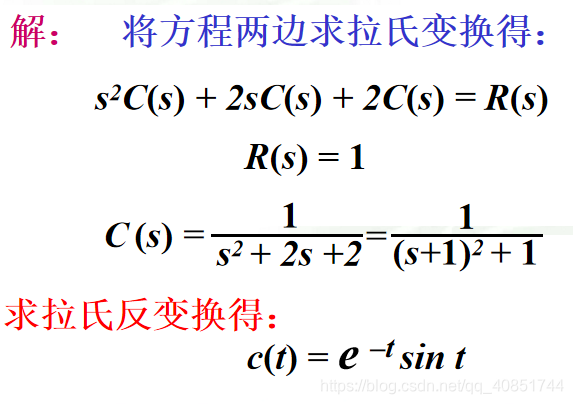
2、已知系统的微分方程式,求系统的输出响应。
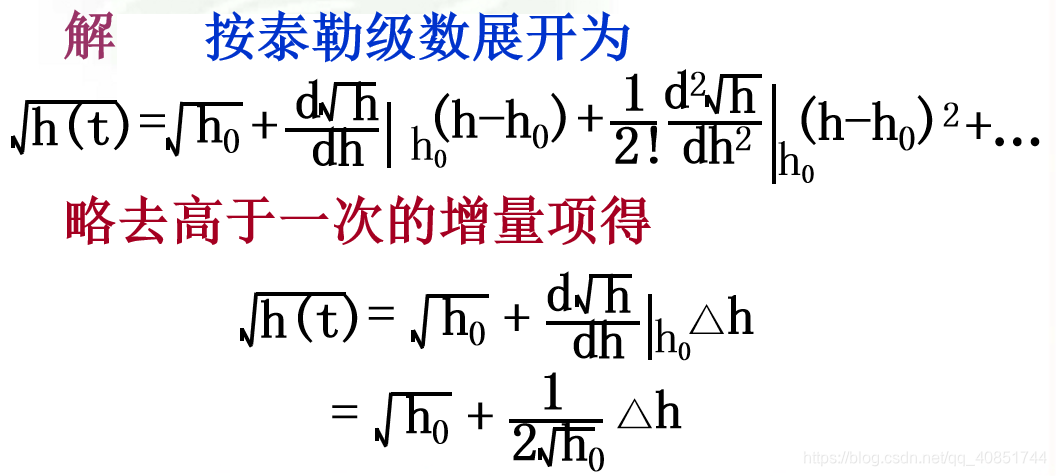
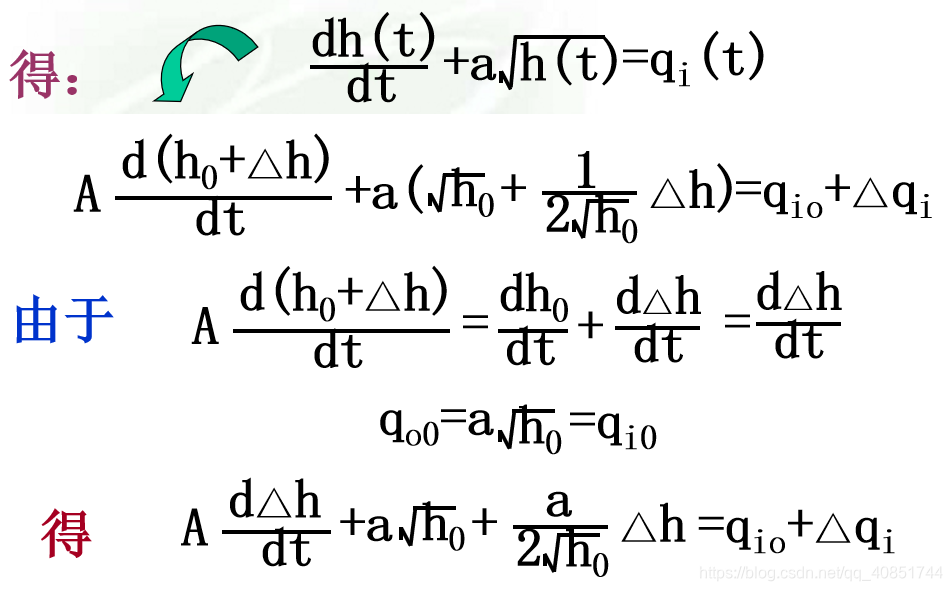
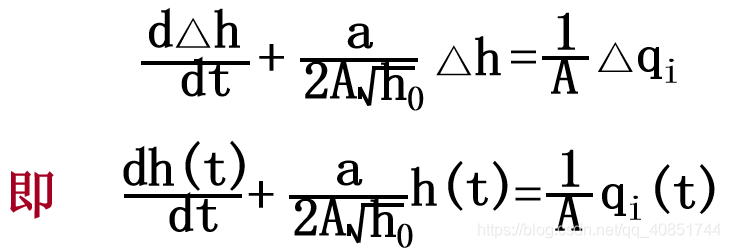
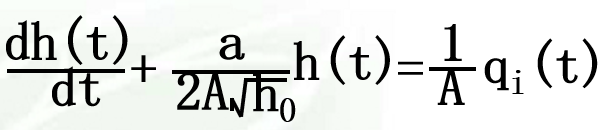
3、将液位控制系统非线性微分方程线性化.

4、传递函数:零初始条件下,系统输出量拉氏变换与系统输入量拉氏变换之比。
5、求图示RLC电路的传递函数。
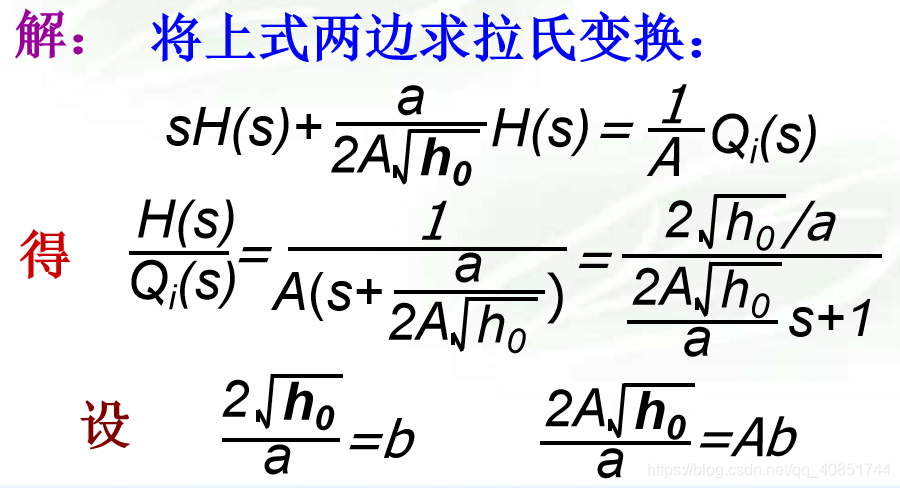
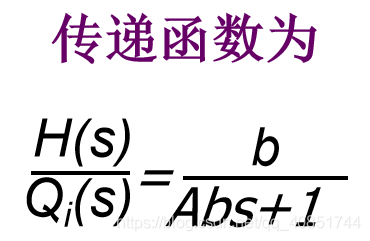
6、求液位控制系统的传递函数
7、方框图
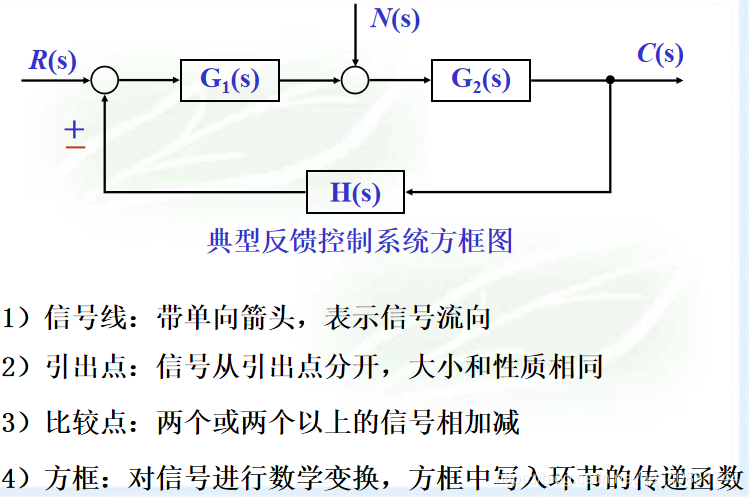
串联相乘、并联相加
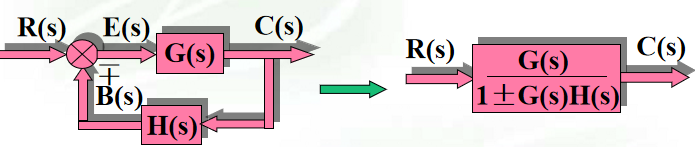
反馈连接
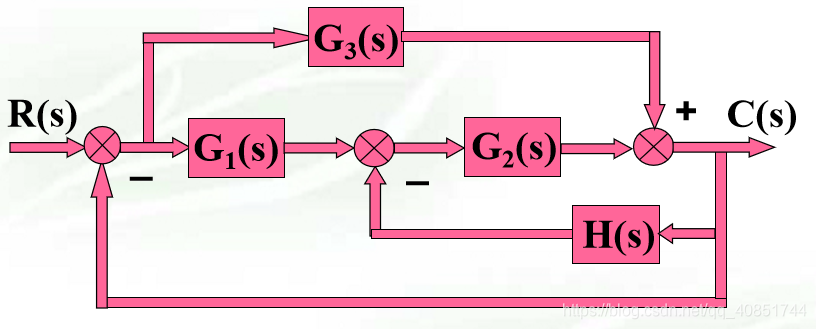
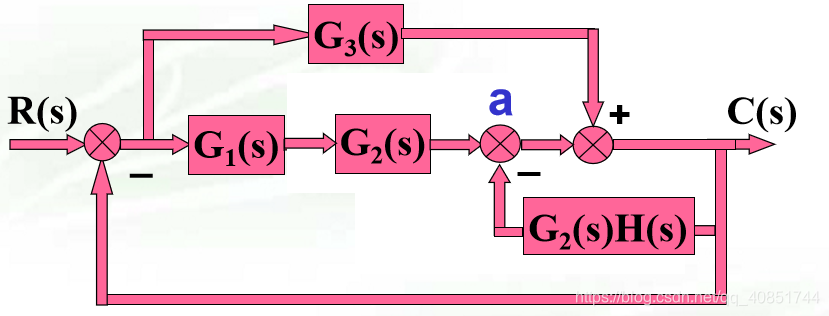
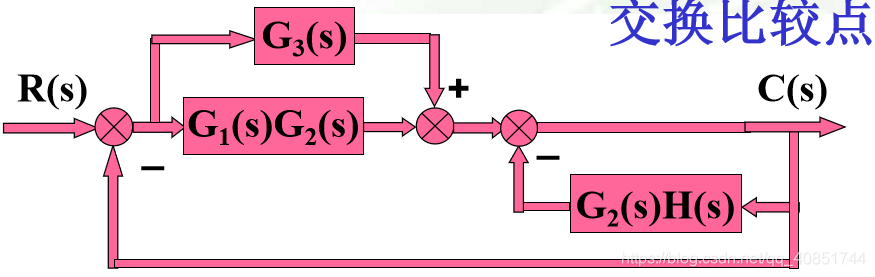
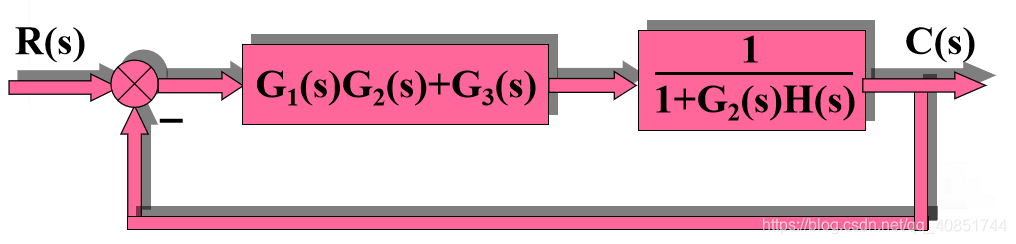
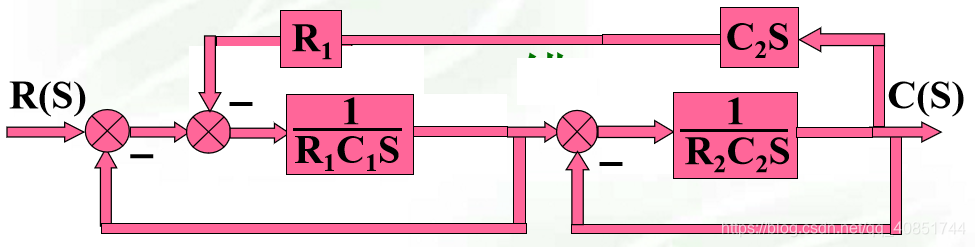
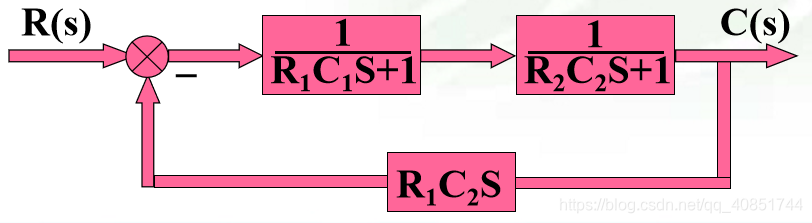
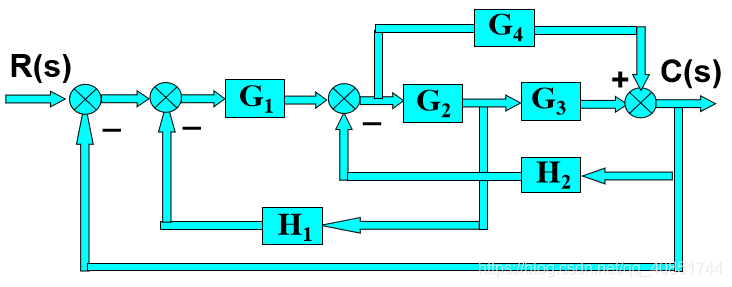
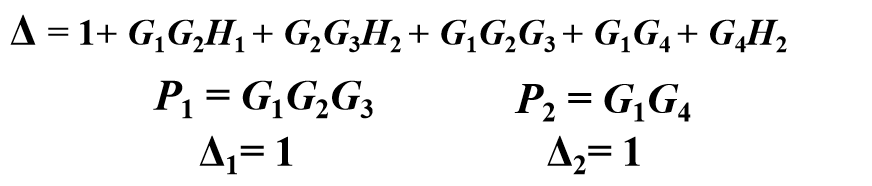
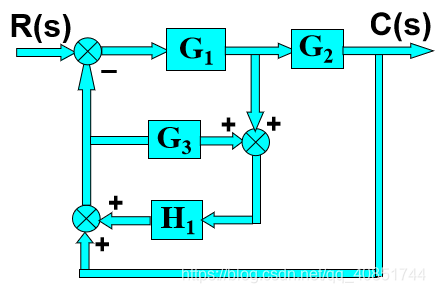
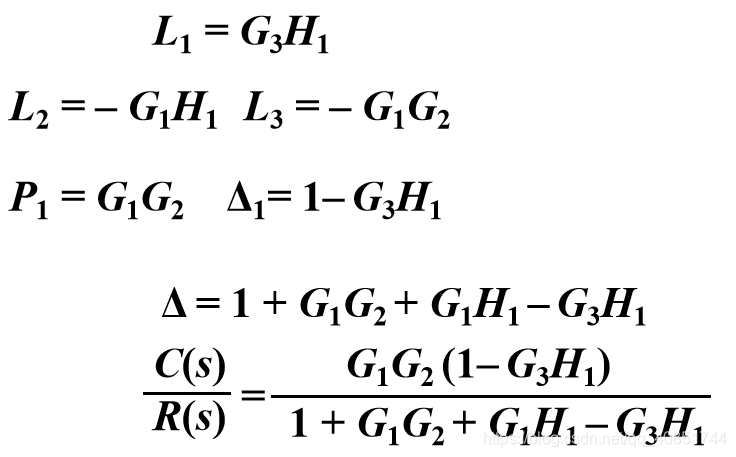
8、试简化如图所示系统的结构图,并求出系统传递函数C(s)/R(s)
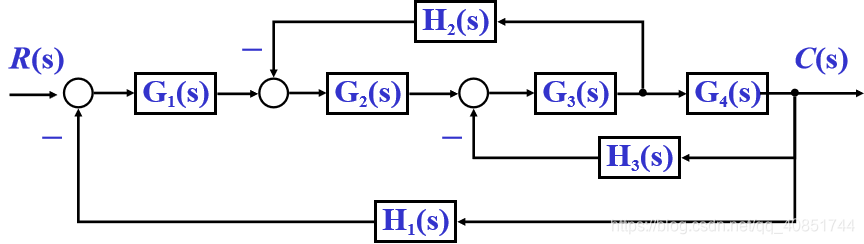
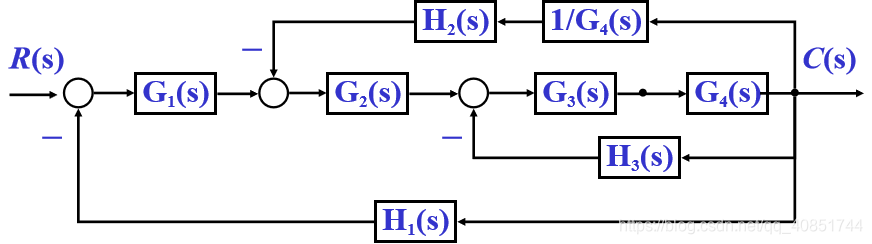
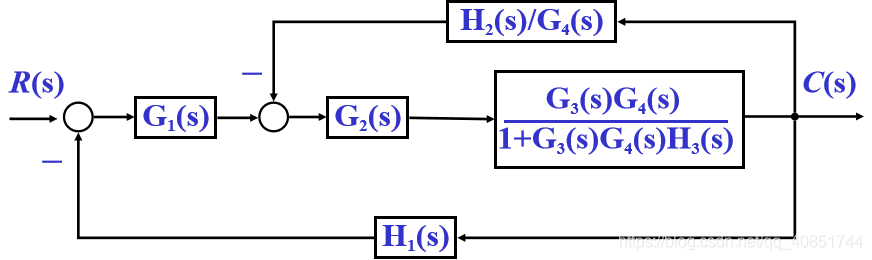
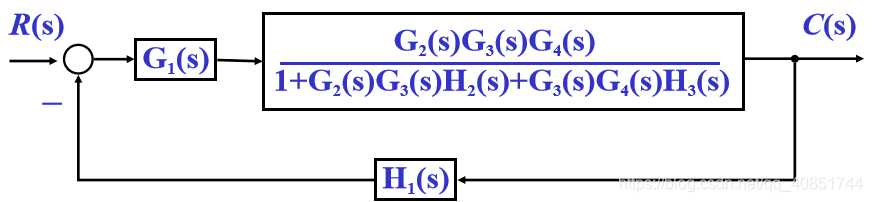

9、简化系统的结构图,求传递函数。
10、求RC串联网络的传递函数。
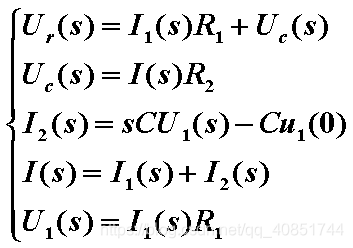
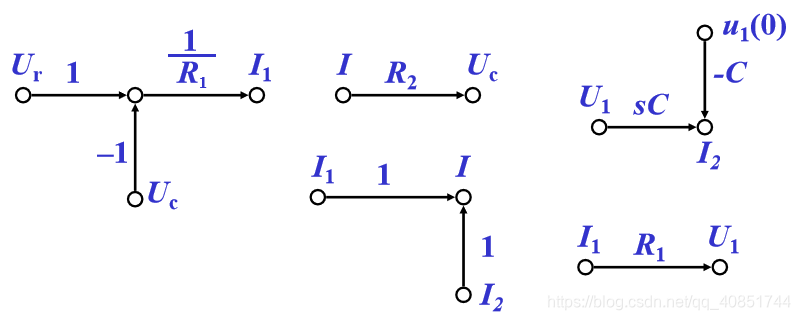
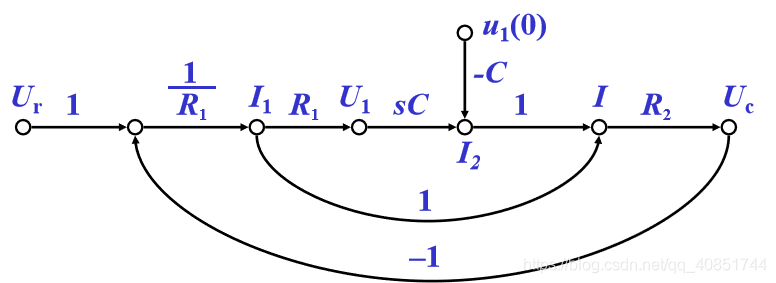
11、画出如图所示无源网络系统的信号流图,设电容初始电压为u1(0)。
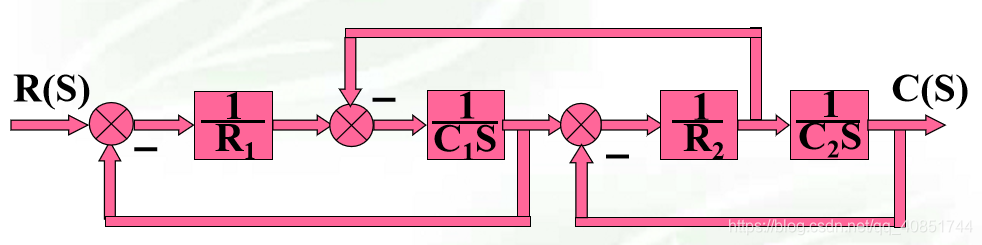
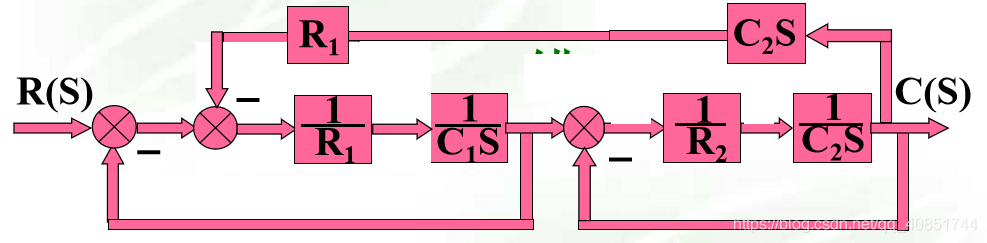
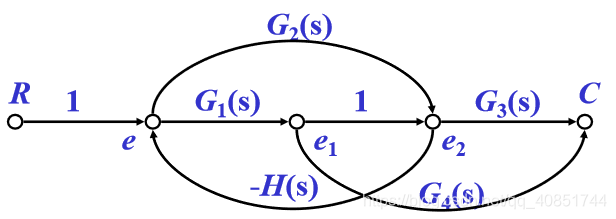
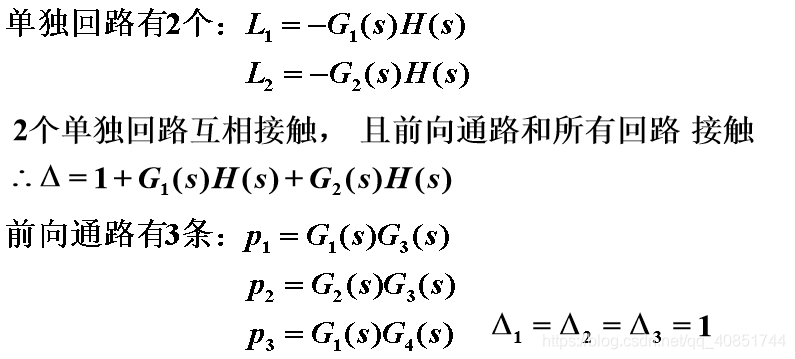
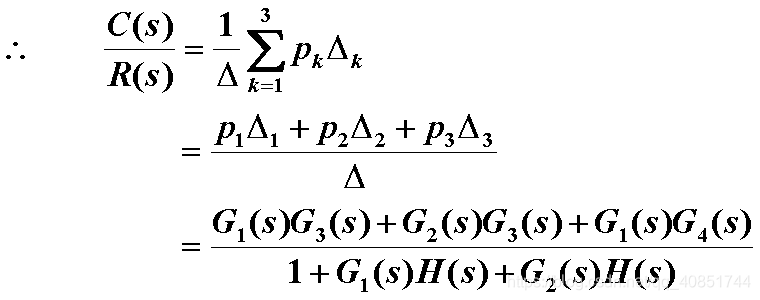
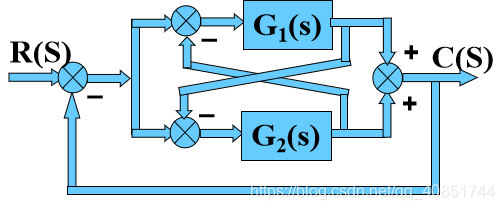
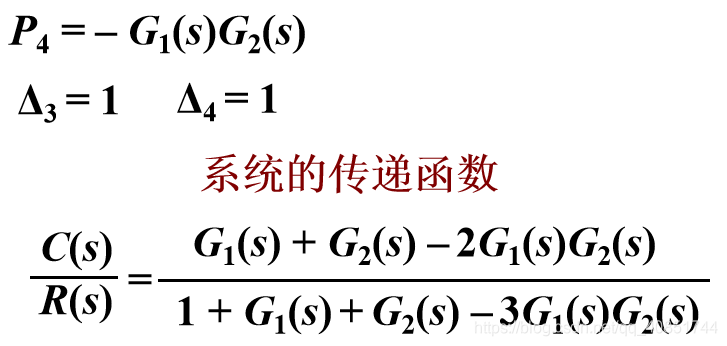
12、求如图所示系统的传递函数C(s)/R(s)。
13、系统的动态结构图如图所示,求闭环传递函数。



14、求系统的闭环传递函数
15、求系统传递函数

第三章
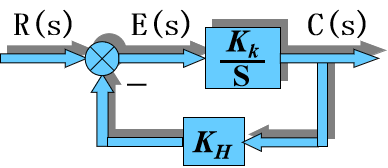
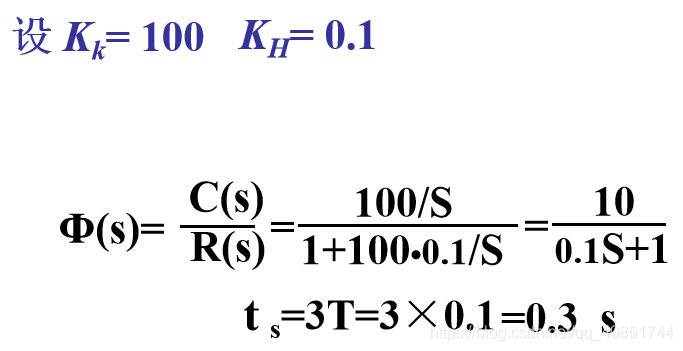
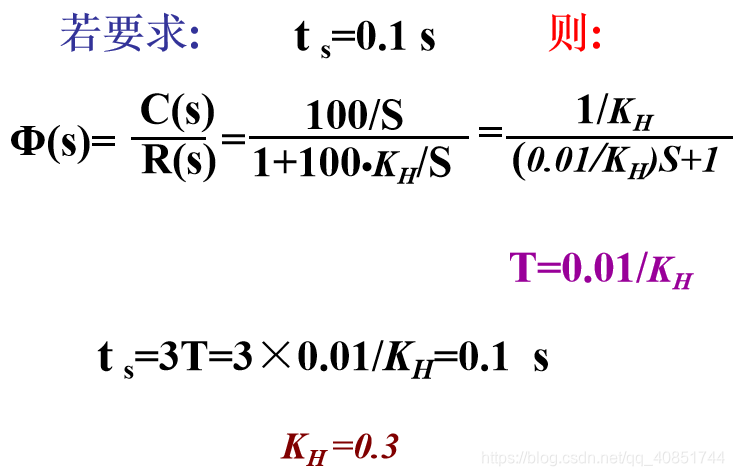
1、一阶系统的结构如图,试求系统的调节时间t s (±5%);如果要求t s= 0.1s,求反馈系数。
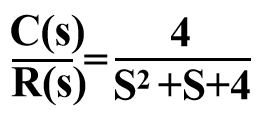
2、已知二阶系统的闭环传递函数,求系统的单位阶跃响应
3、欠阻尼二阶系统动态性能指标
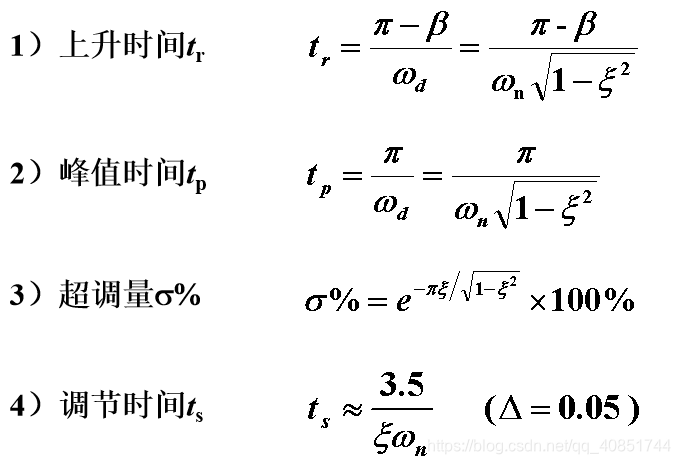
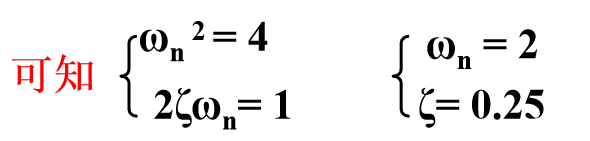
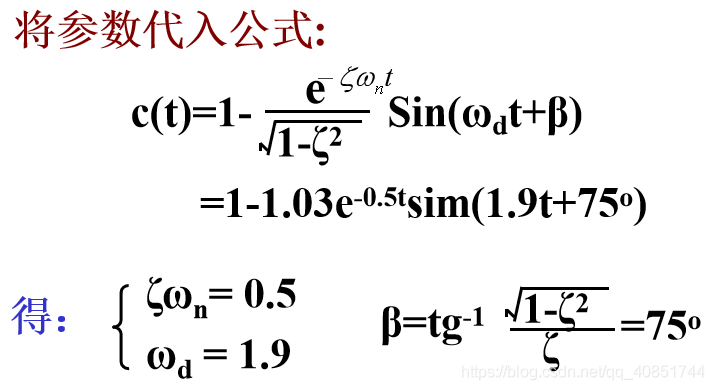
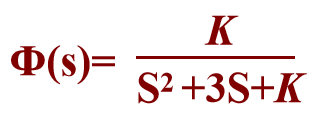
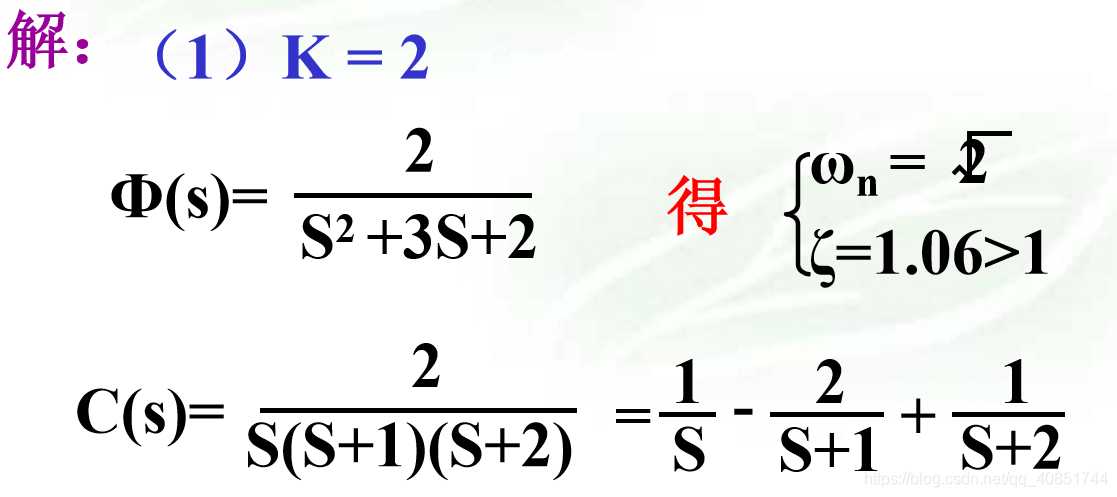
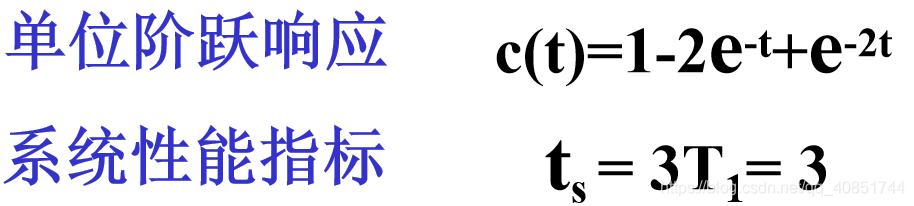
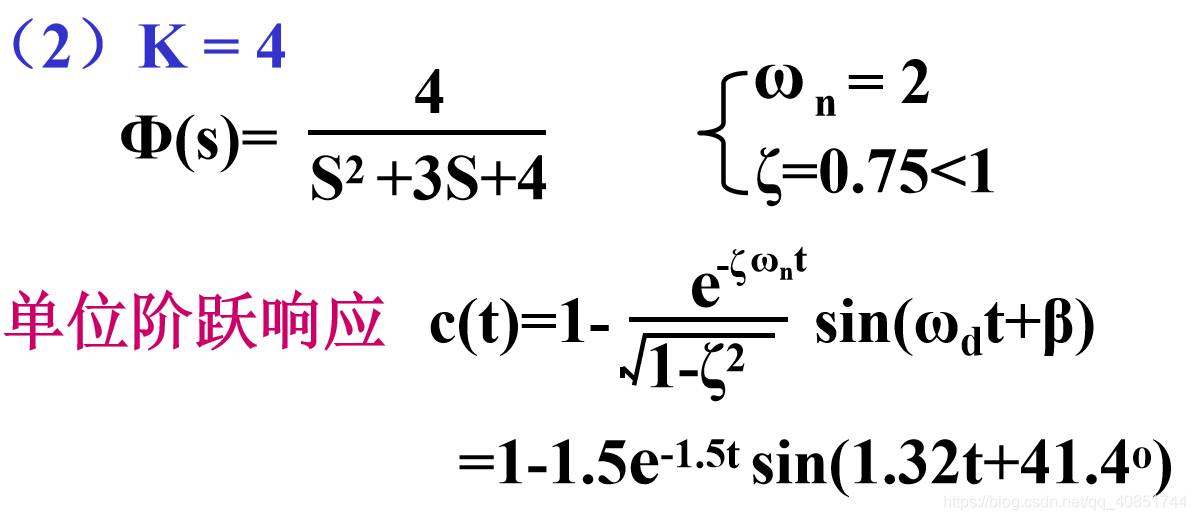
4、已知系统的闭环传递函数 ,当K = 2, K = 4 时,求系统的单位阶跃响应和σ% ,ts 。

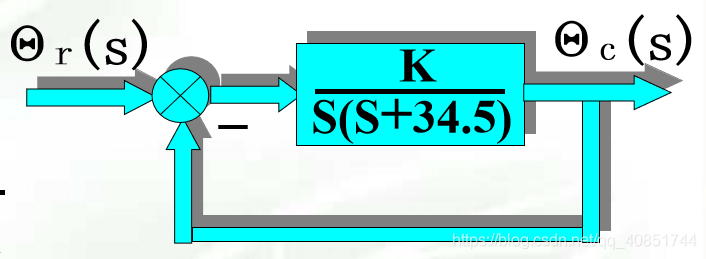
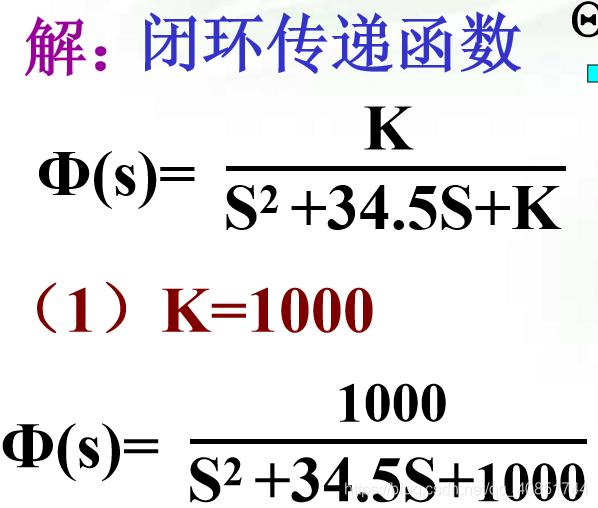
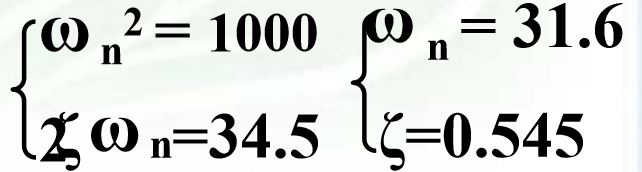
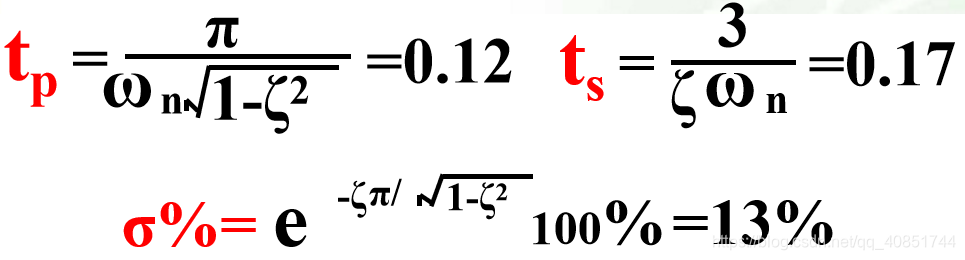
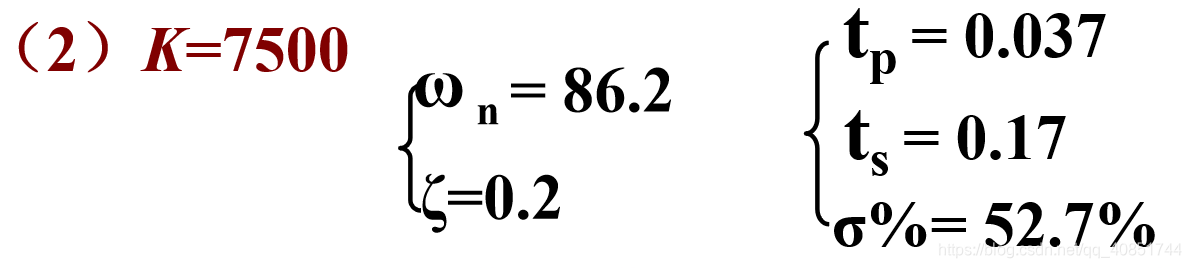
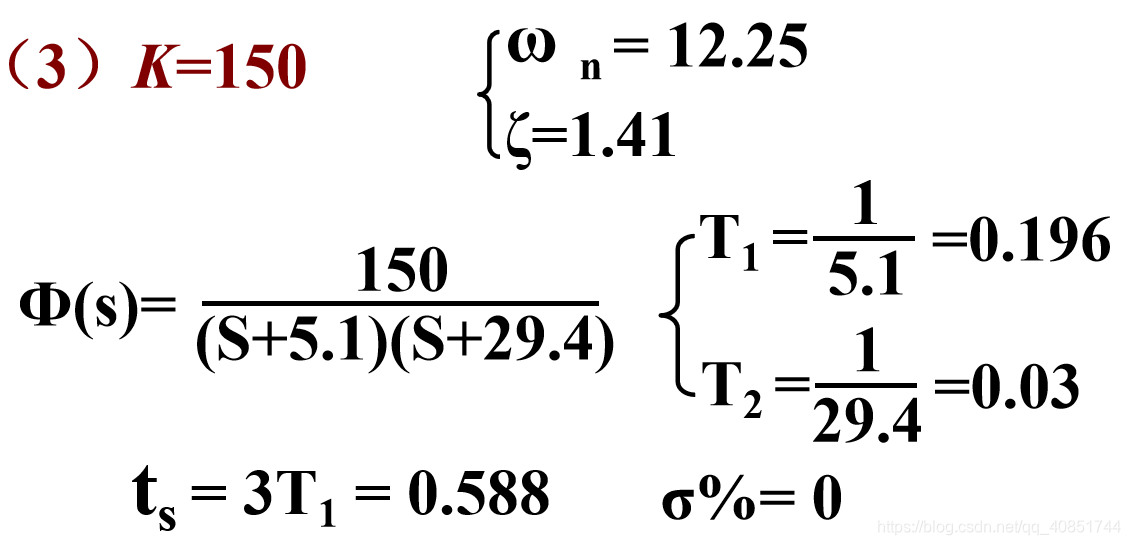
5、已知随动系统的结构如图,试计算在不同参数下,系统的动态性能指标。K=1000, K=7500, K=150。
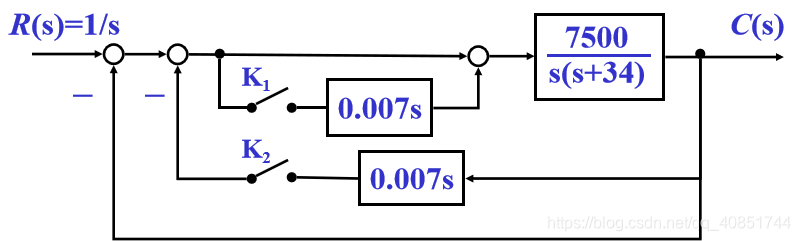
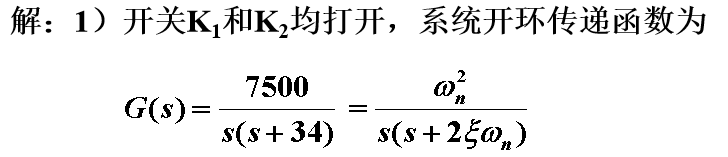
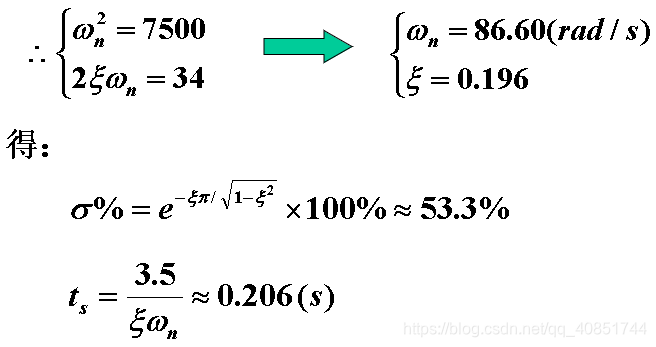
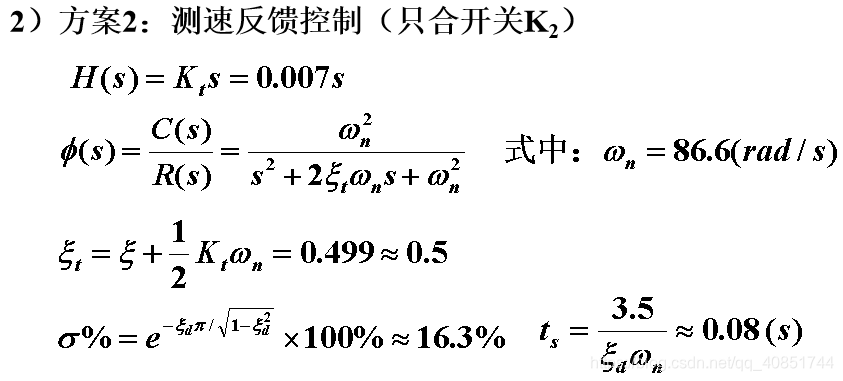
6、系统结构图如图所示。 1)若开关K1和K2均打开,试求该系统动态性能指标δ%、ts; 2)为降低系统的超调量且提高系统的快速性,试给出设计系统的两种方案,并求出其中任意一种方案的性能指标δ%、ts。
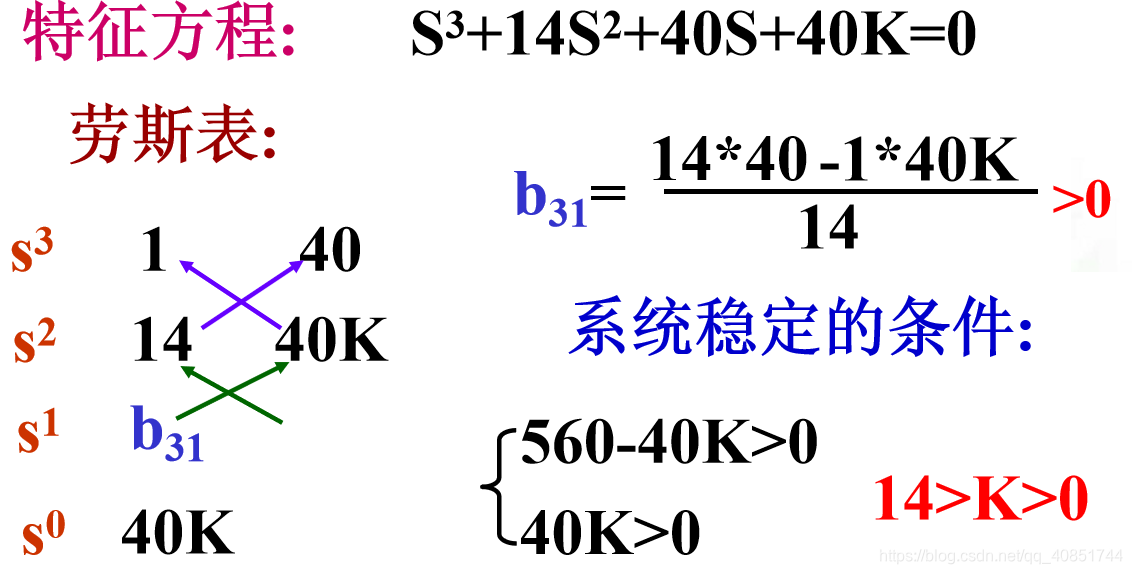
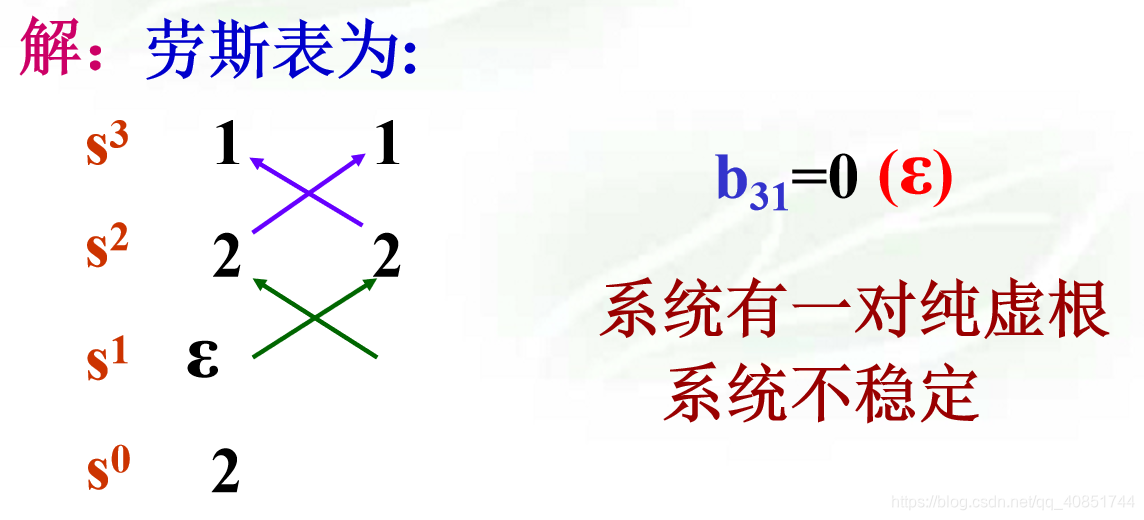
7、已知系统的特征方程,试判断该系统的稳定性。


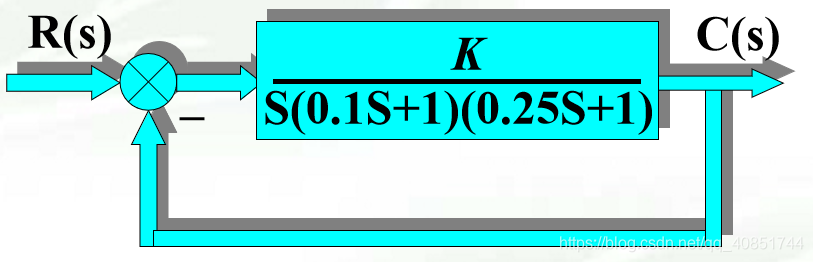
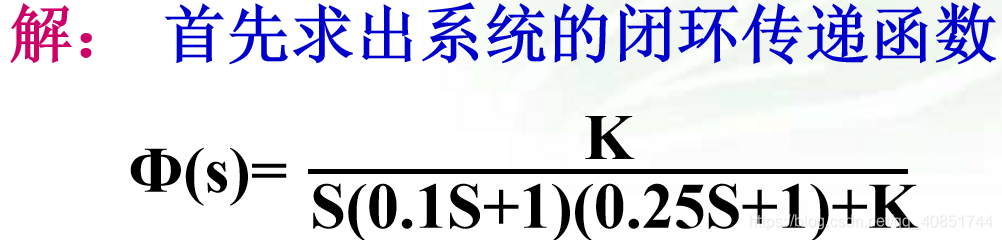
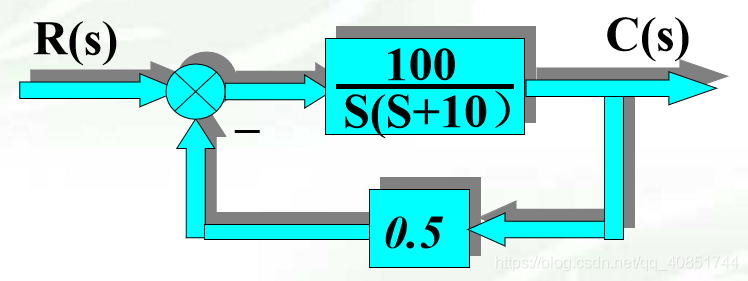
8、系统如图所示,试确定系统稳定放大倍数K的取值范围。
9、已知系统的特征方程,试判断系统的稳定性。
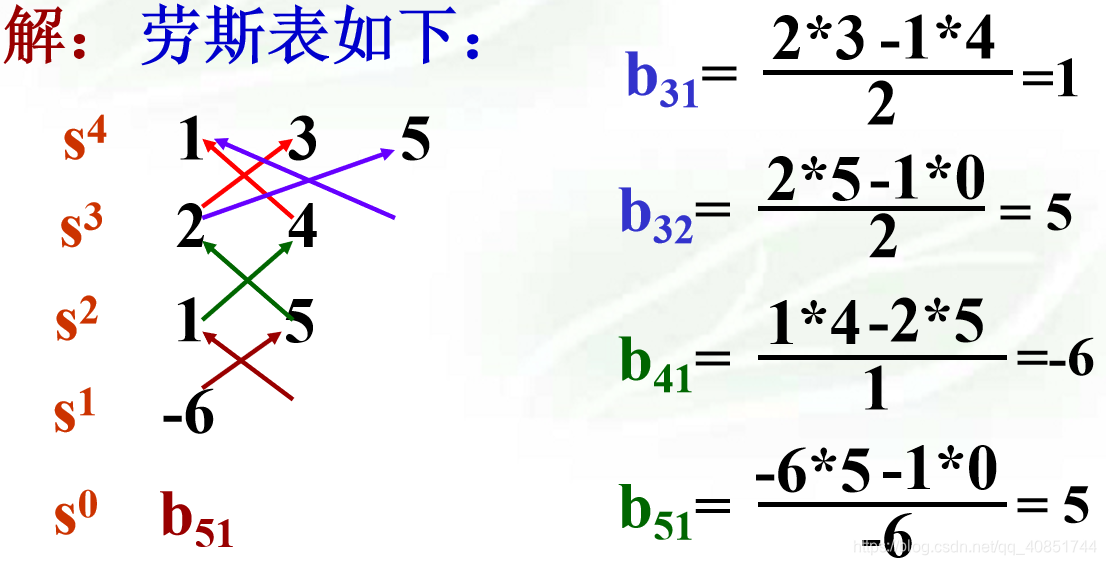
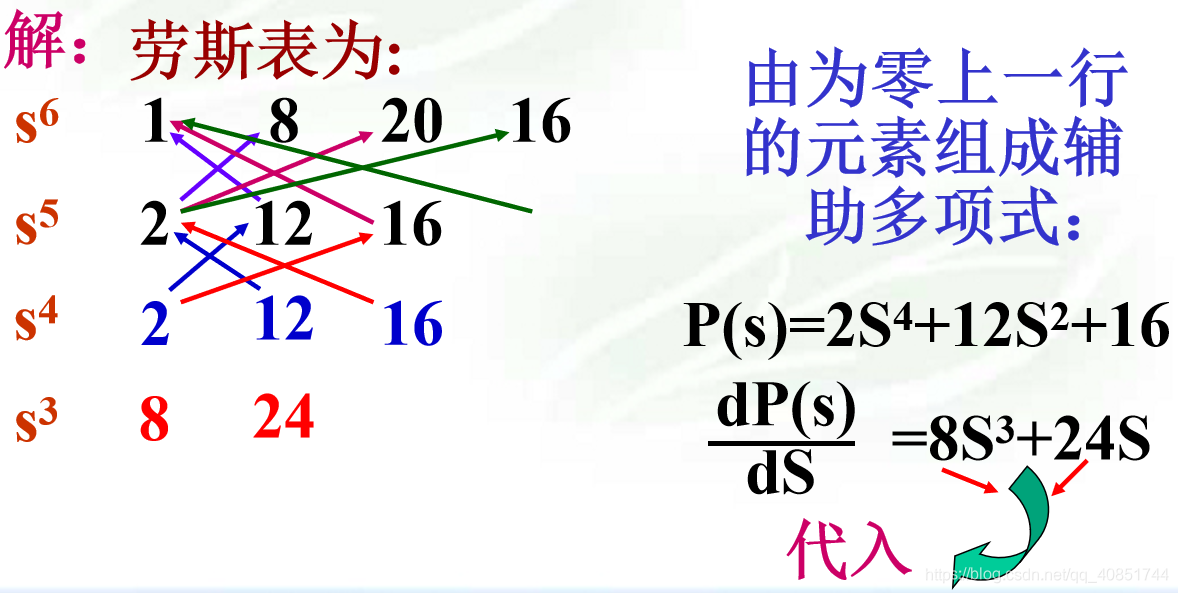
10、已知系统的特征方程,试用劳斯判据确定方程的根在S平面上的分布。

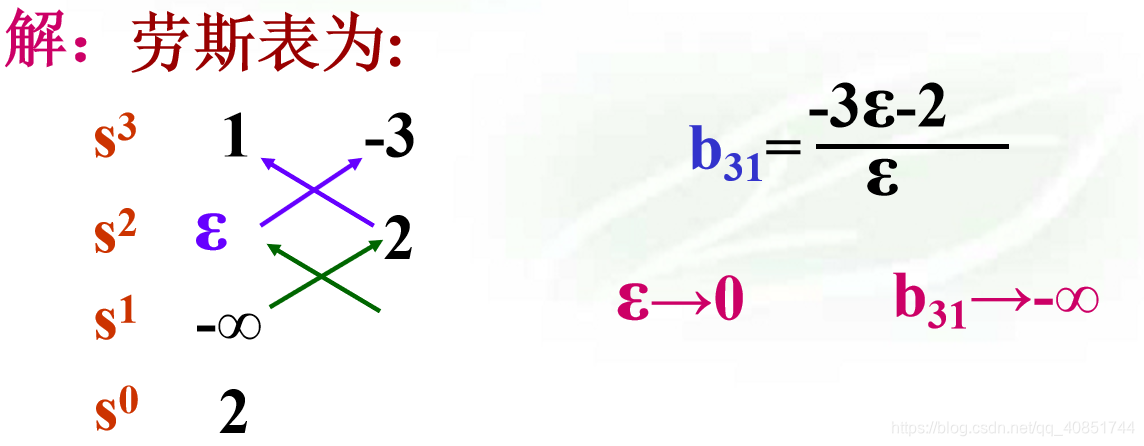
11、已知控制系统的特征方程,试判断系统的稳定性


劳斯表中某行同乘以某正数,不影响系统稳定性的判断。
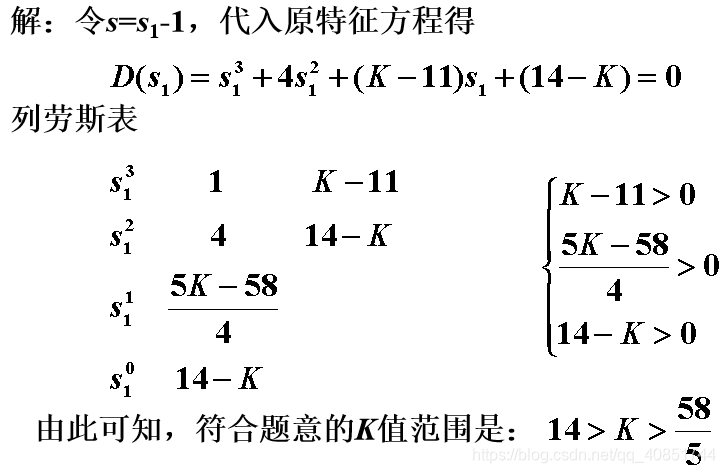
12、设系统闭环特征方程如下,试求使所有闭环极点位于s=-1垂线之左时K的取值范围。

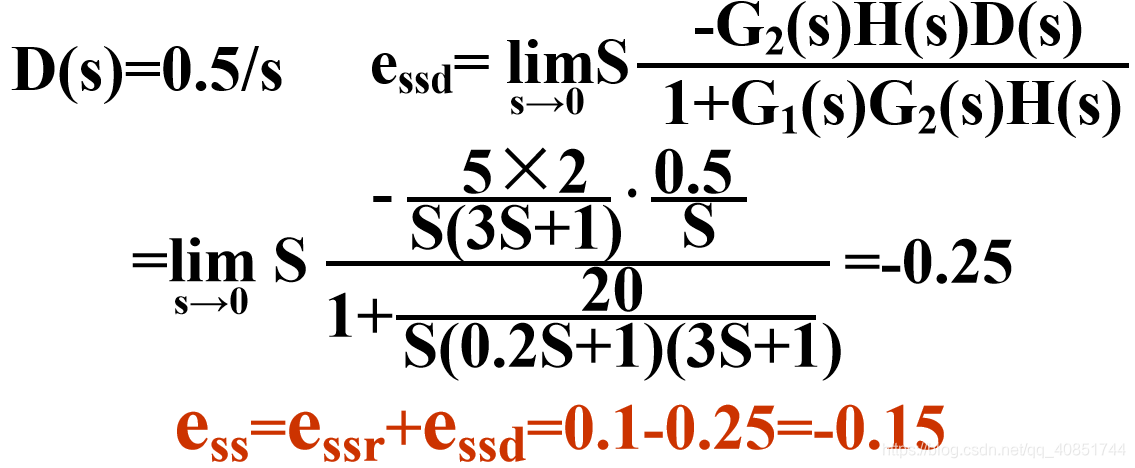
13、已知系统的结构如图所示。求系统的稳态误差。
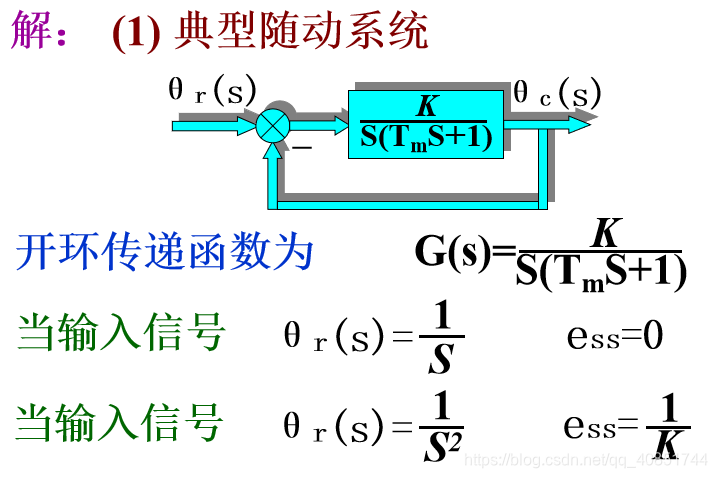
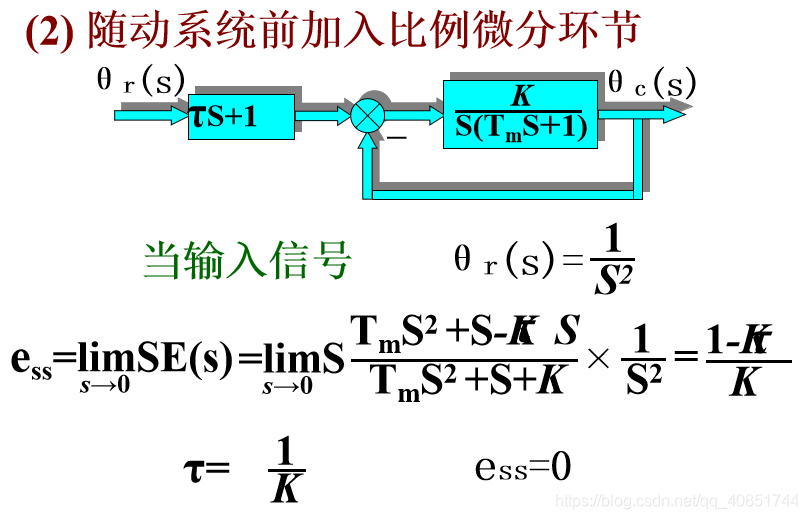
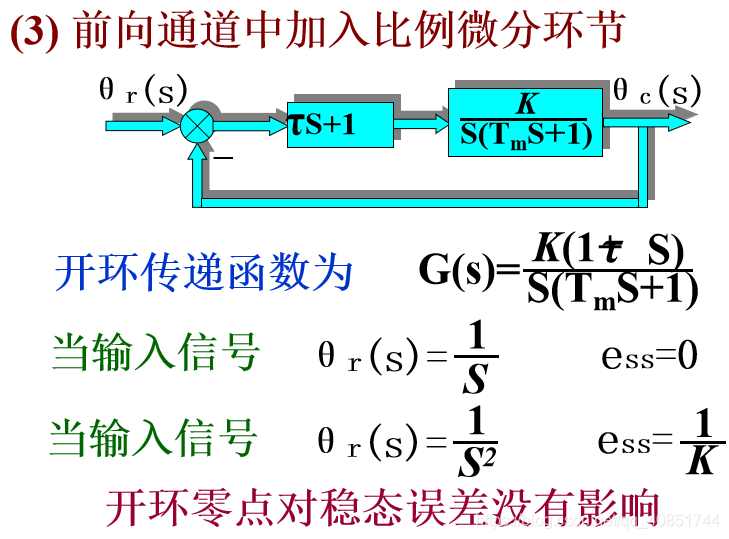
14、位置随动系统的稳态误差分析。
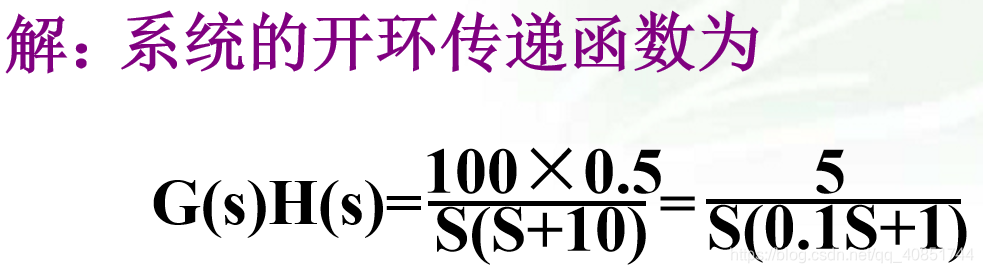
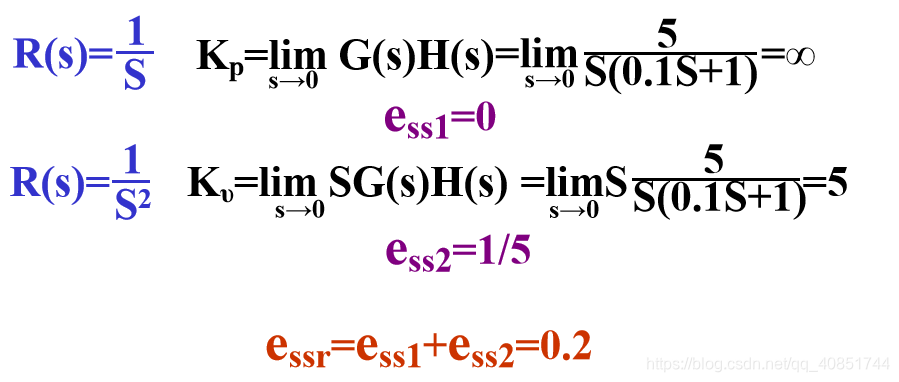
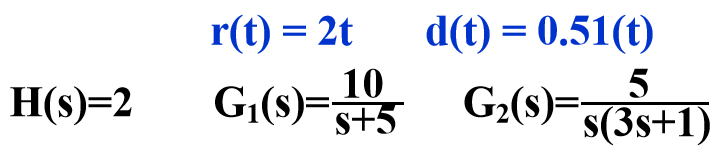
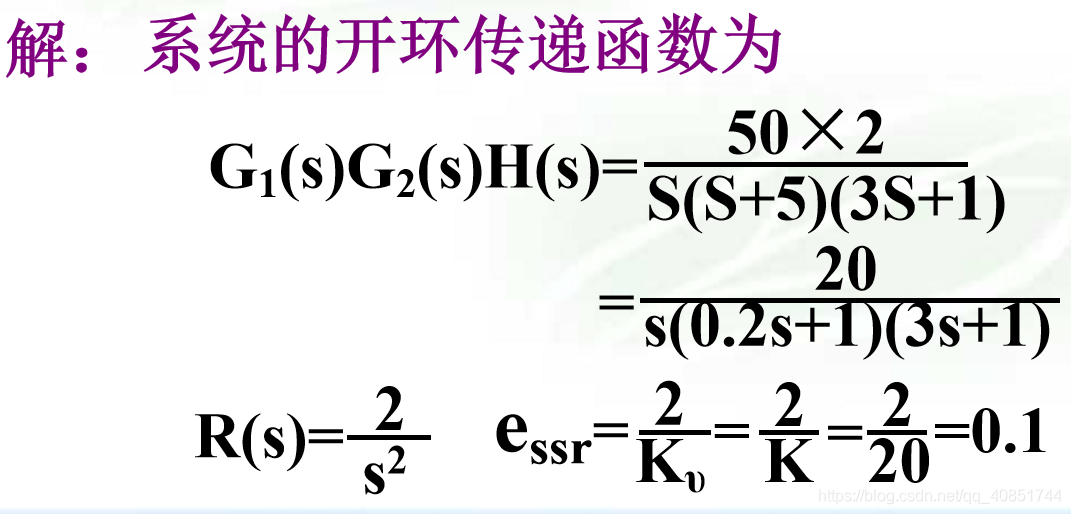
15、已知系统的传递函数, 求系统的稳态误差。
第四章
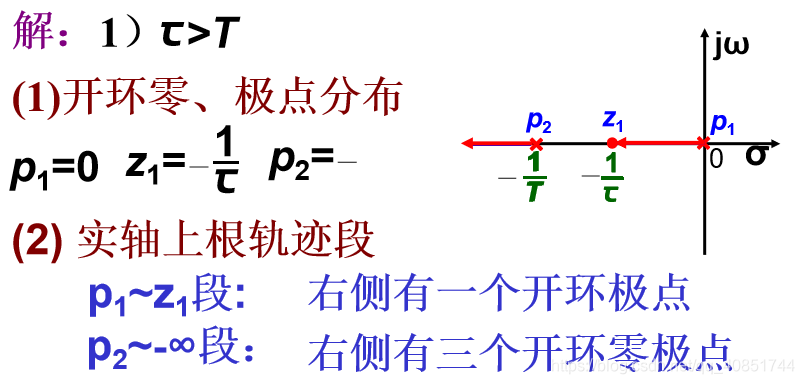
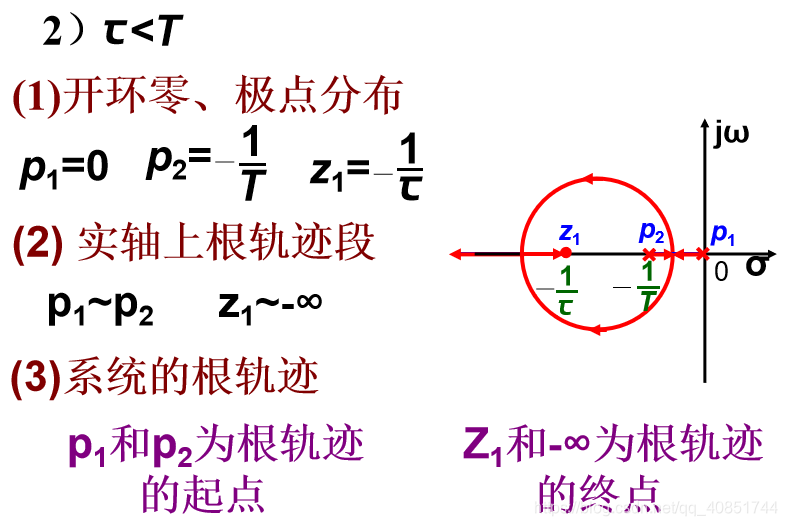
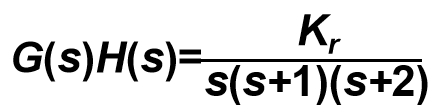
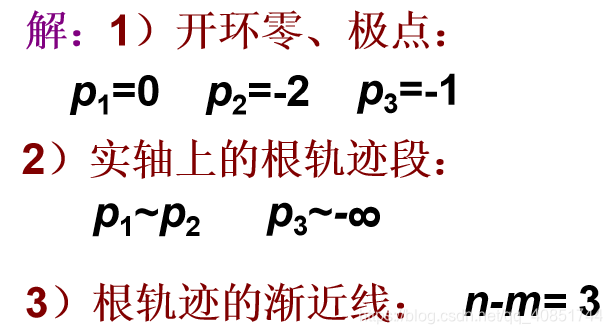
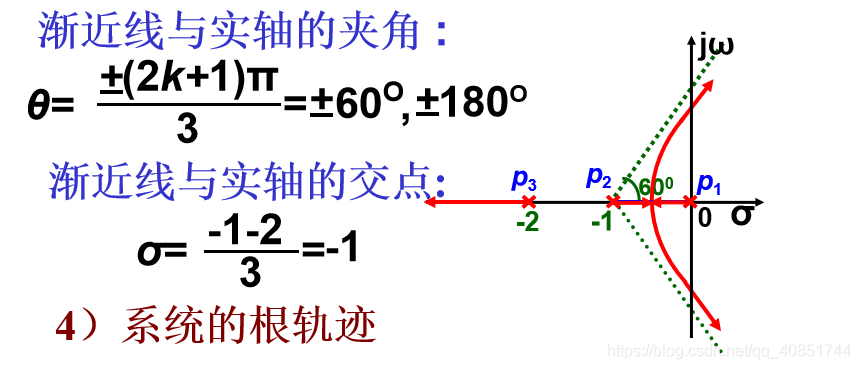
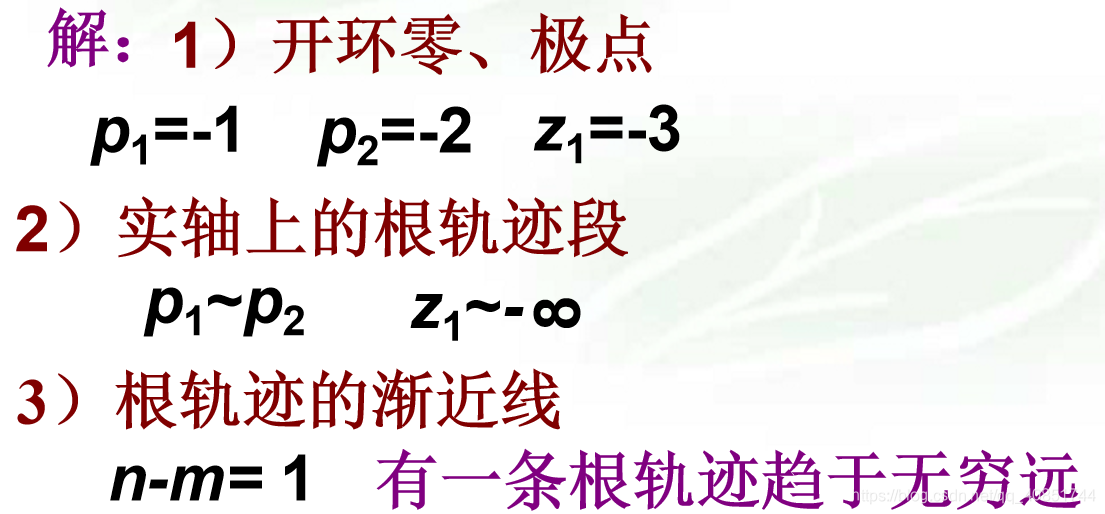
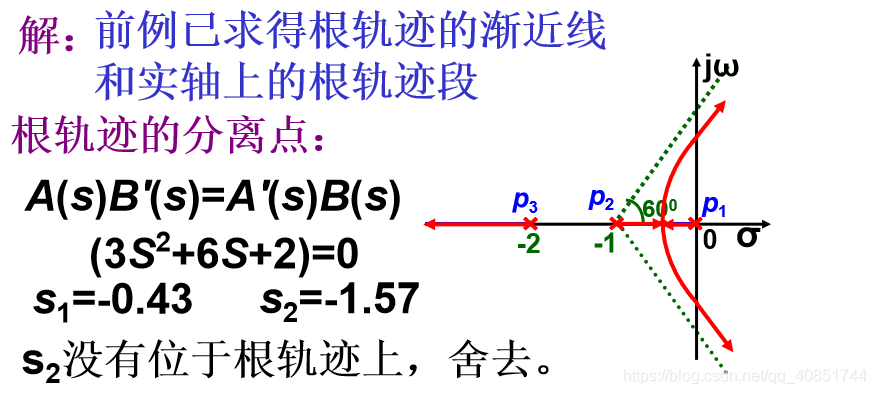
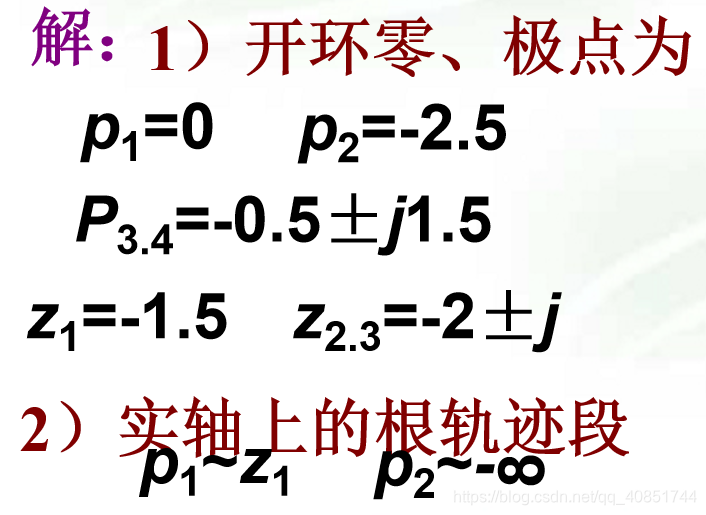
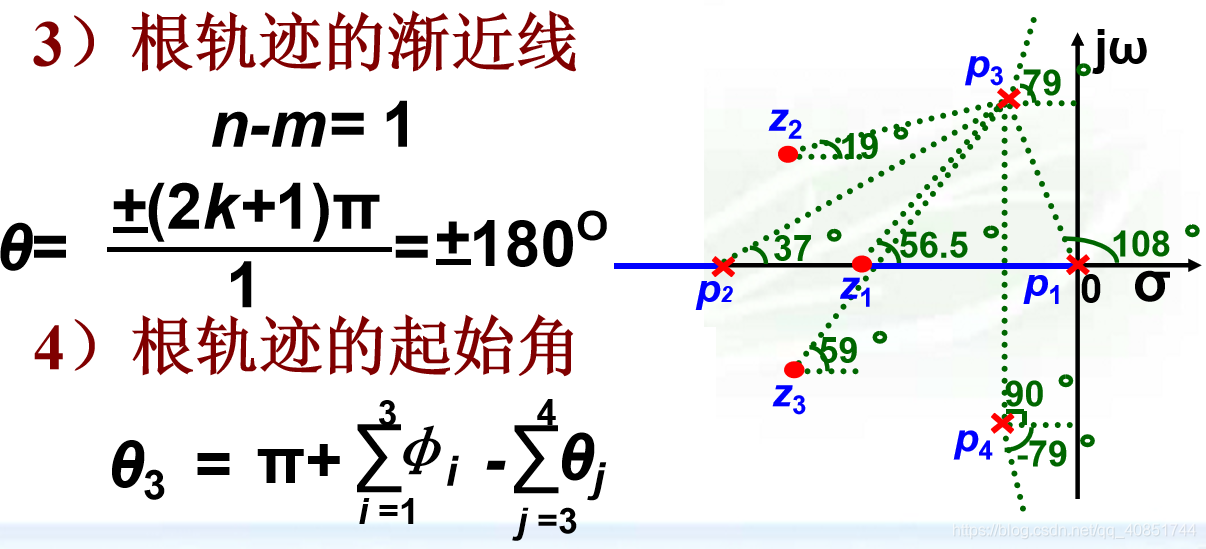
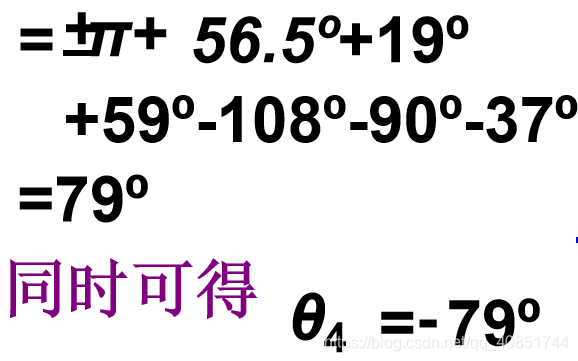
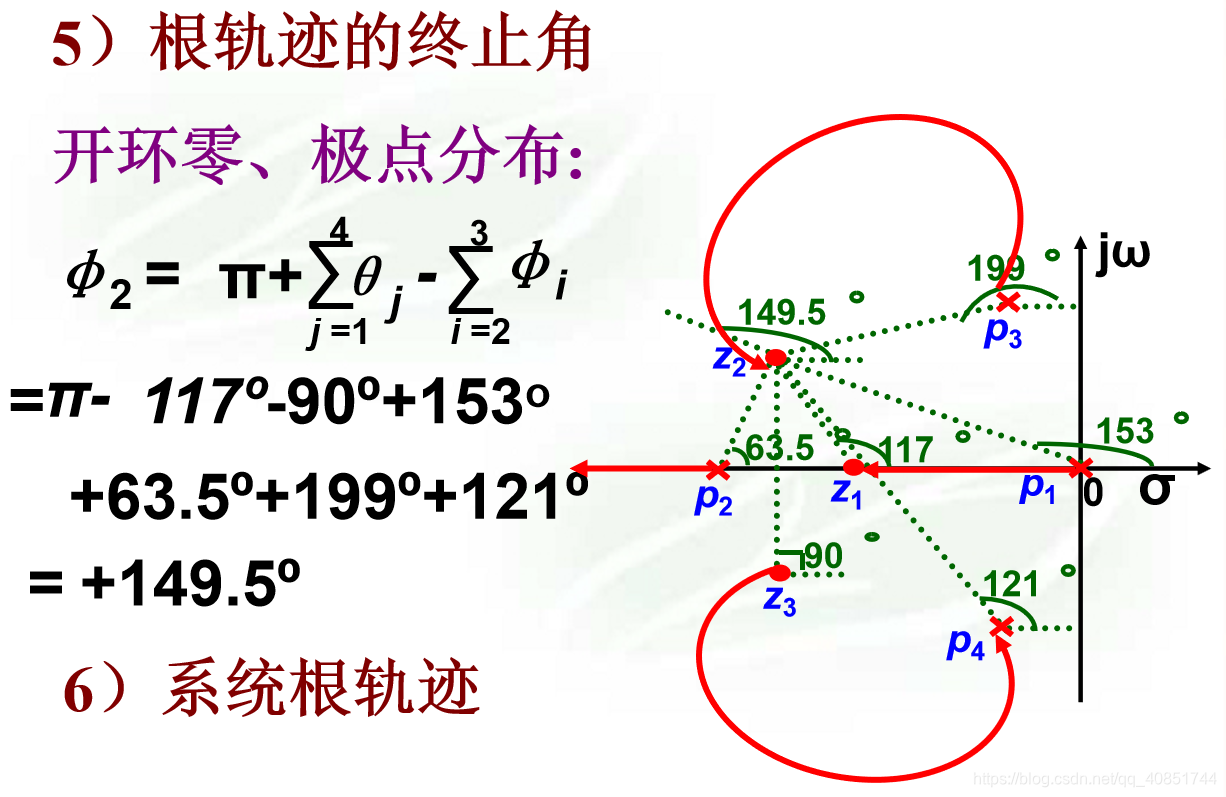
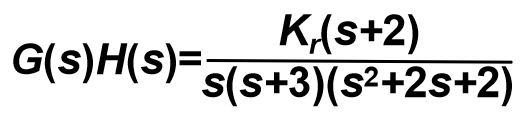
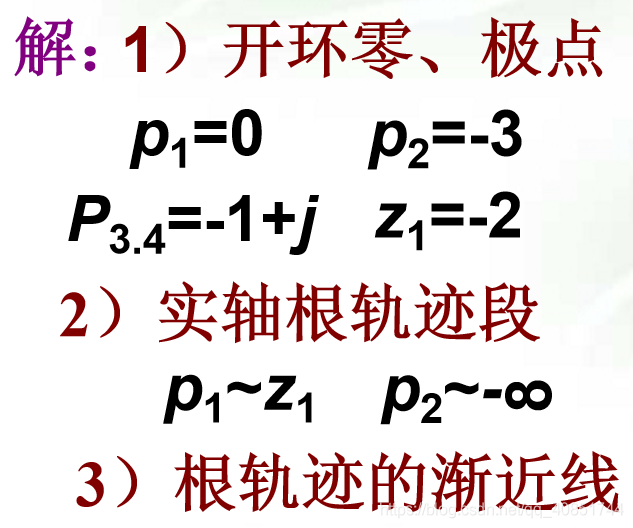
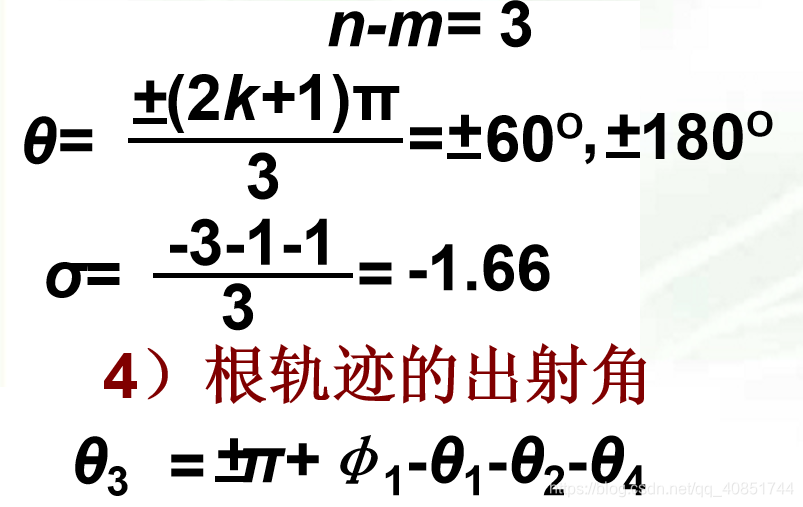
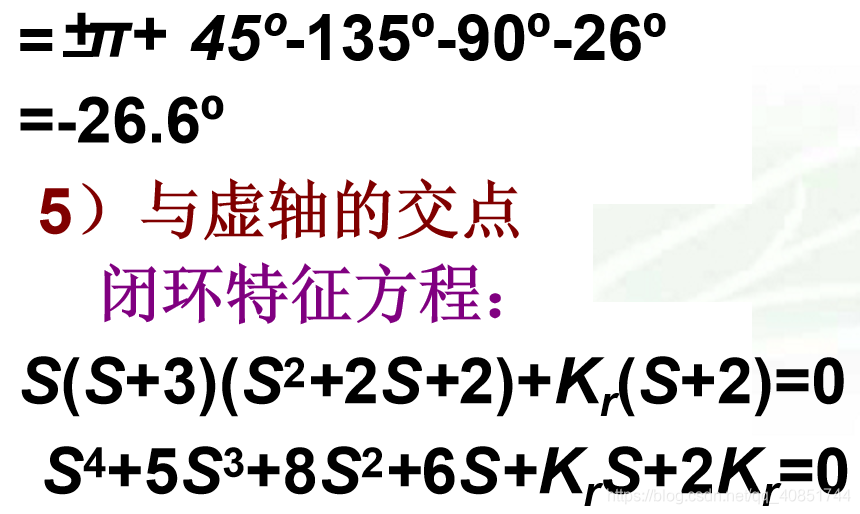
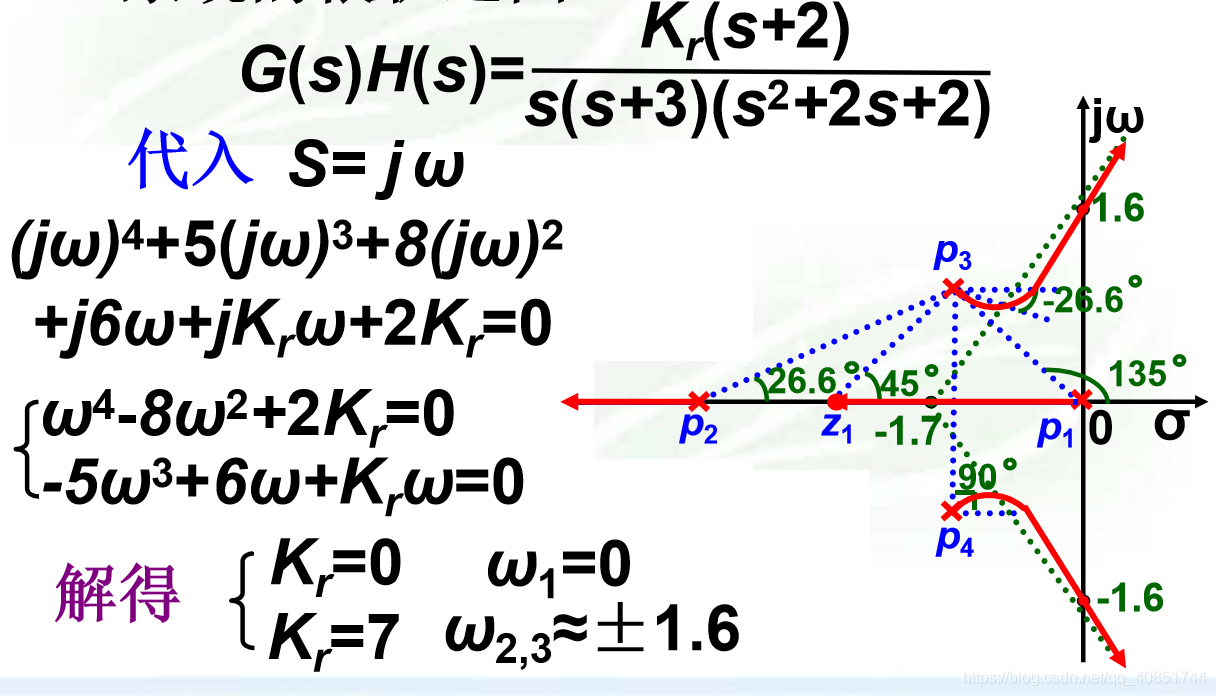
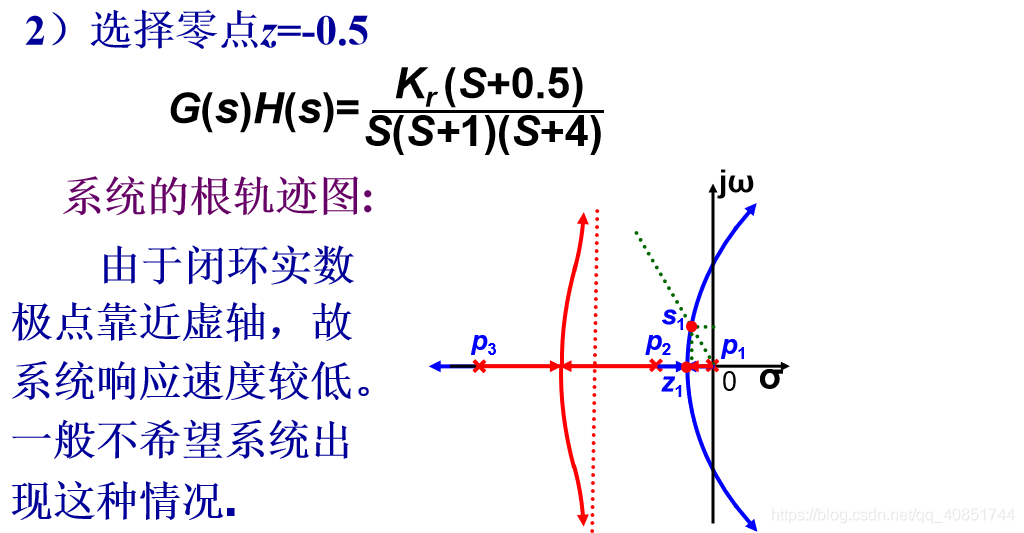
1、已知系统的开环传递函数,试确定系统的根轨迹图
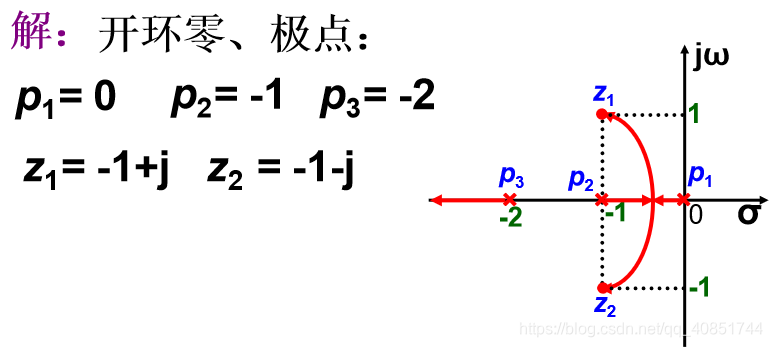
两条根轨迹终止于开环传递函数的两个零点,另一条趋于无穷远。系统的三条根轨迹起始于三个开环传递函数的极点。
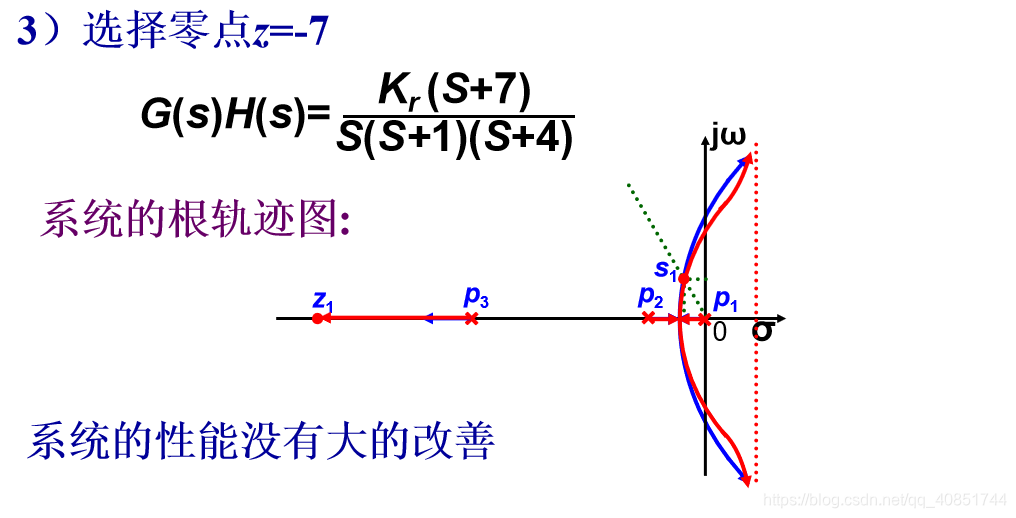
2、已知系统的开环传递函数,试确定系统的根轨迹图。
3、已知系统的开环传递函数,试确定系统的根轨迹图。
4、已知系统的开环传递函数,试确定根轨迹图。
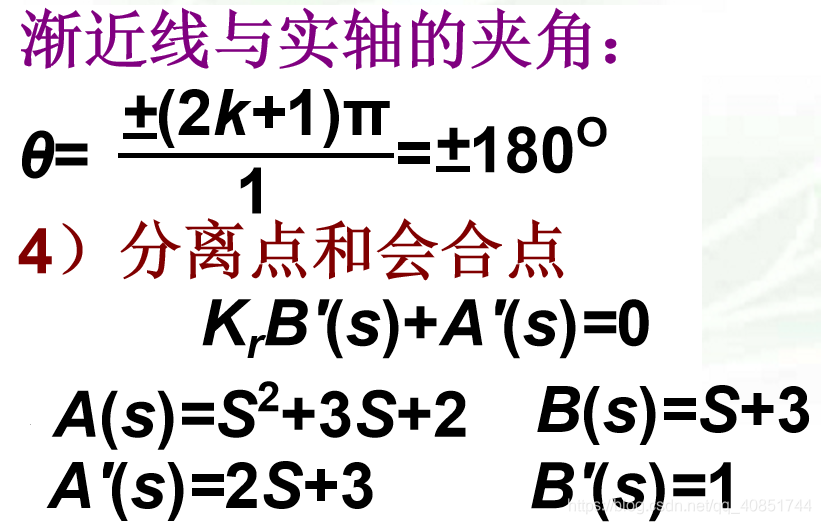
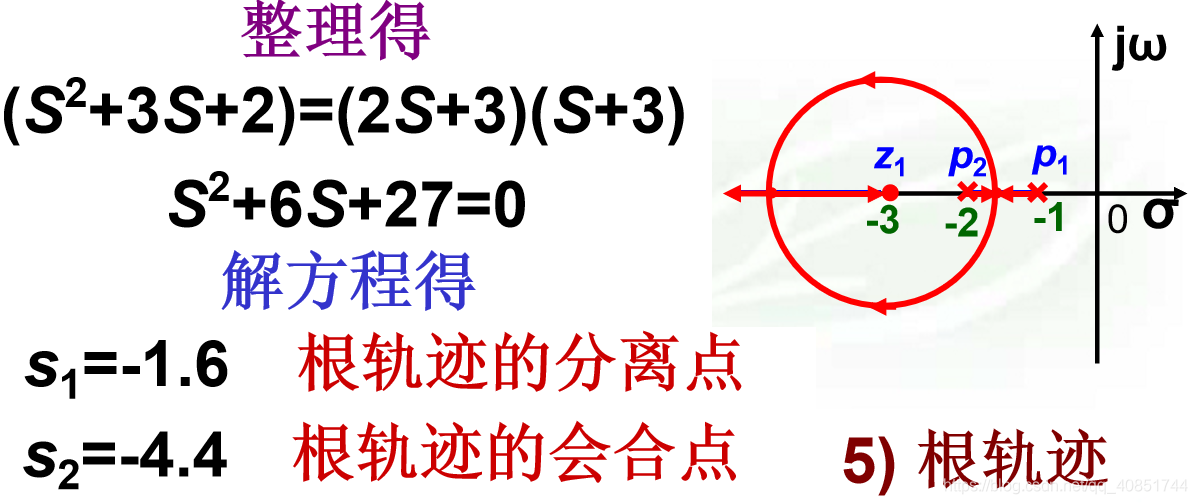
5、试确定系统分离点。
6、已知系统的开环传递函数,试确定系统的根轨迹图。
7、已知系统的开环传递函数,试确定系统的根轨迹图。
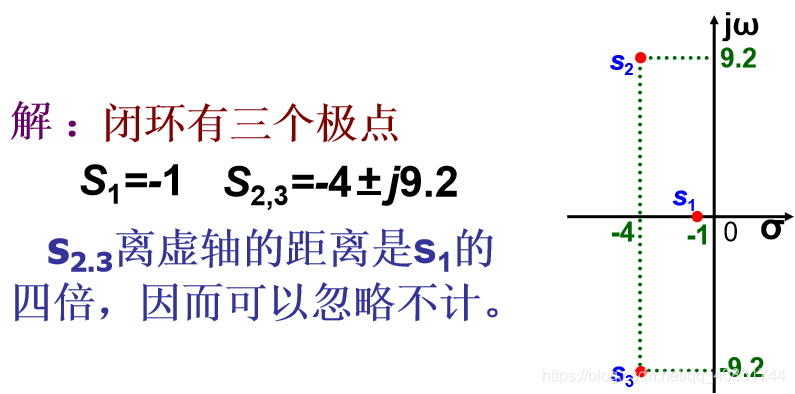
8、已知系统的闭环传递函数,试估算系统的性能指标:

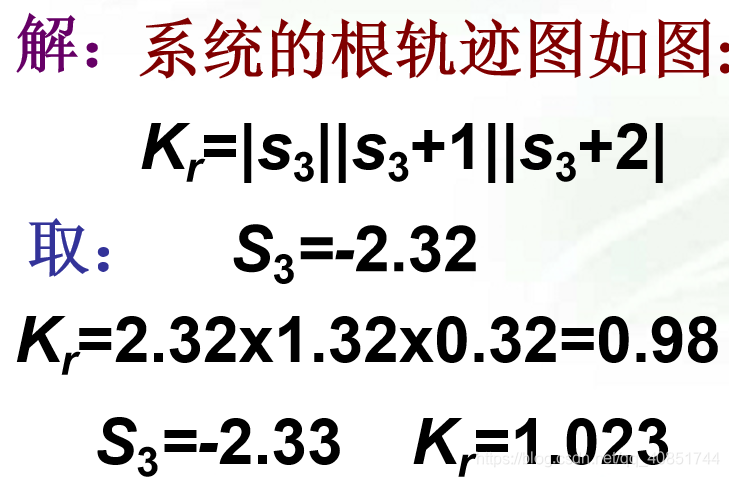
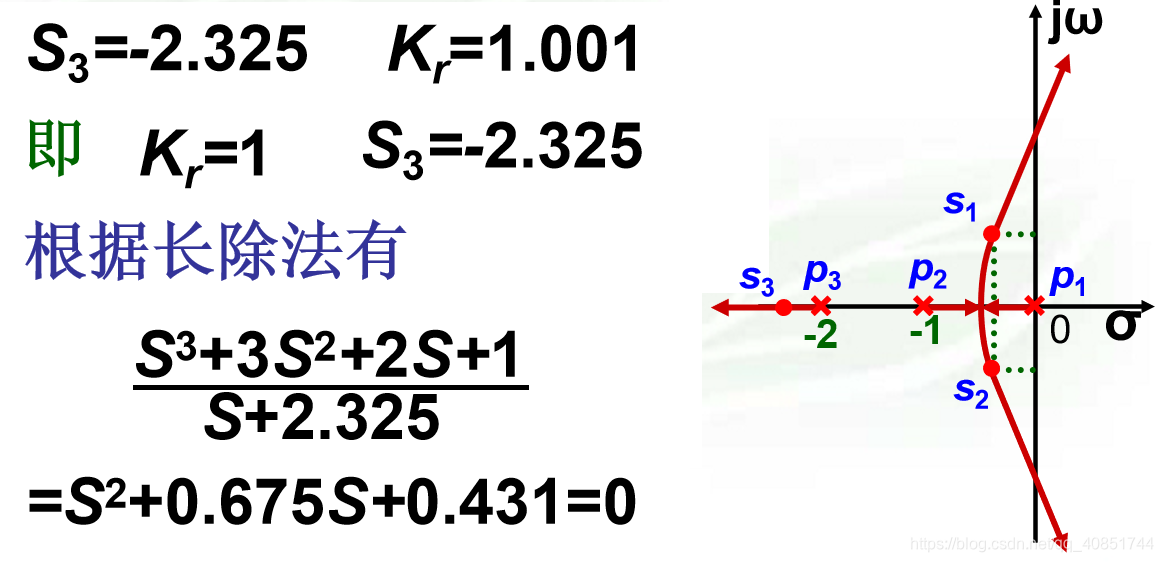
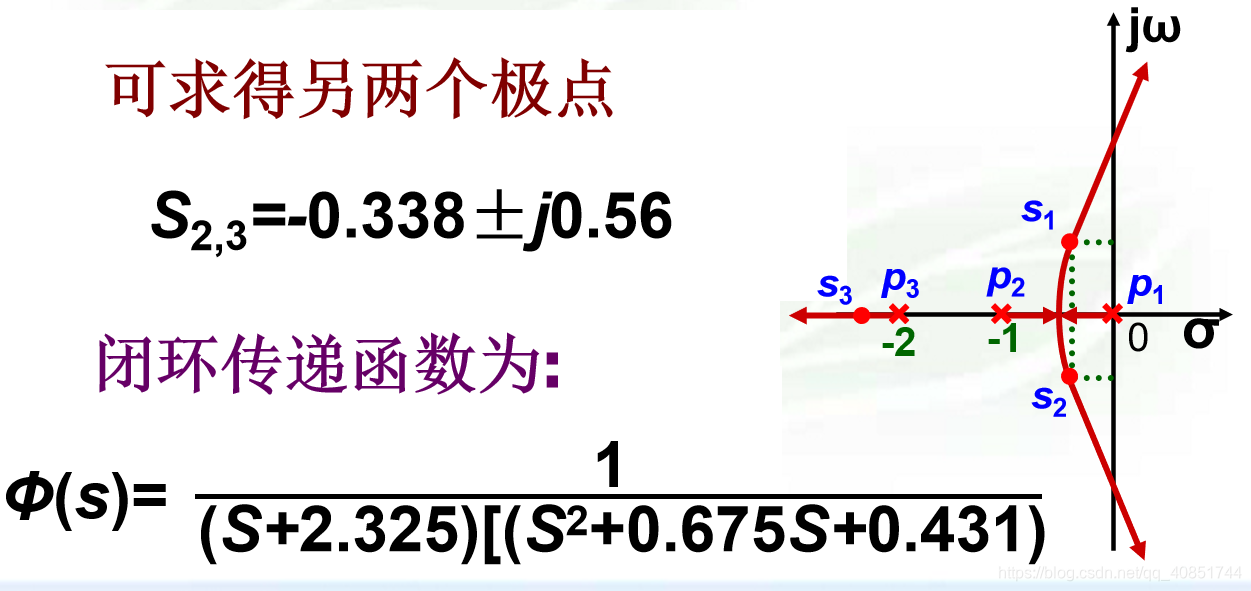
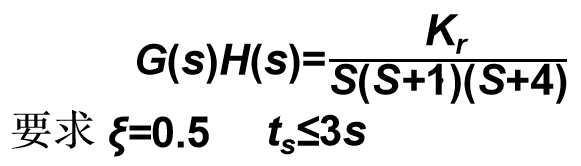
9、已知系统的开环传递函数,试确定Kr=1时的闭环极点:
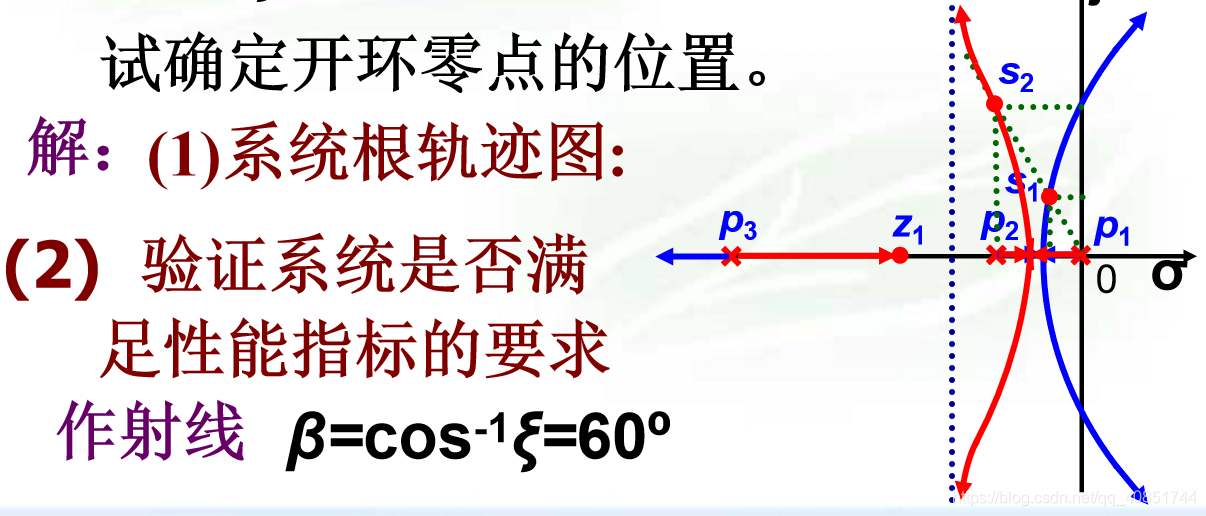
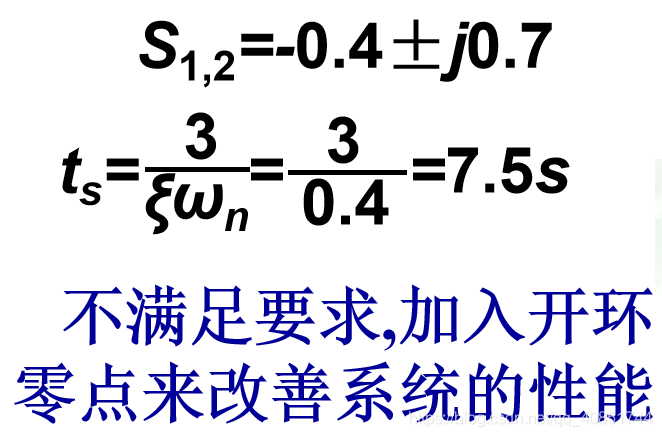
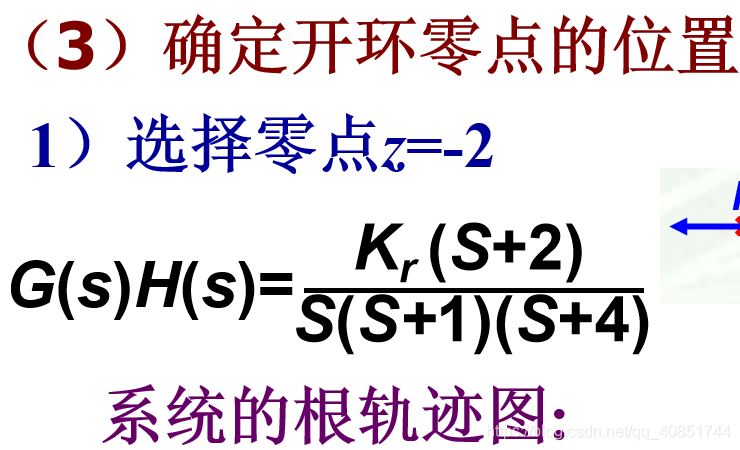
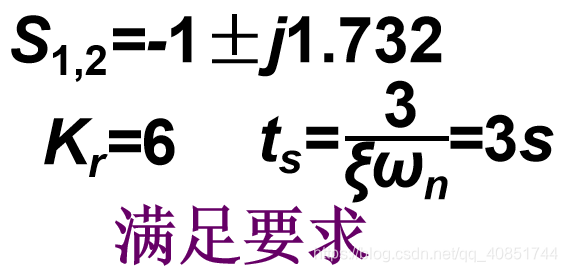
10、已知系统的开环传递函数,求开环零点的位置:
第五章
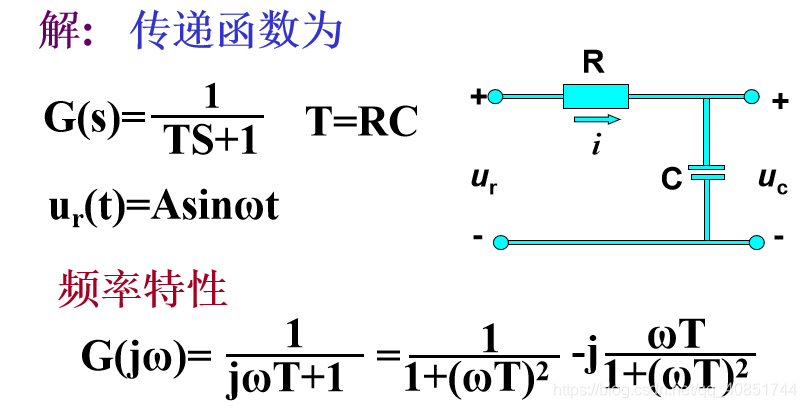
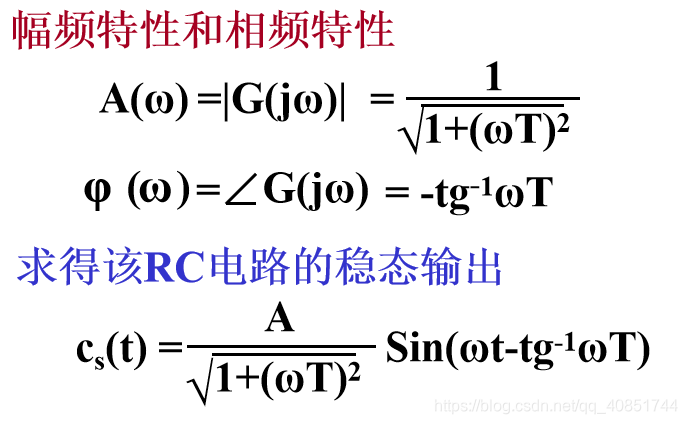
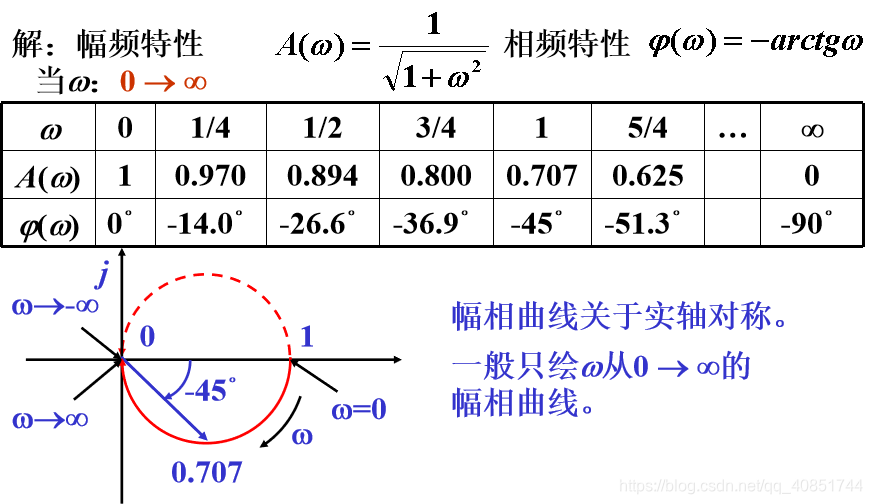
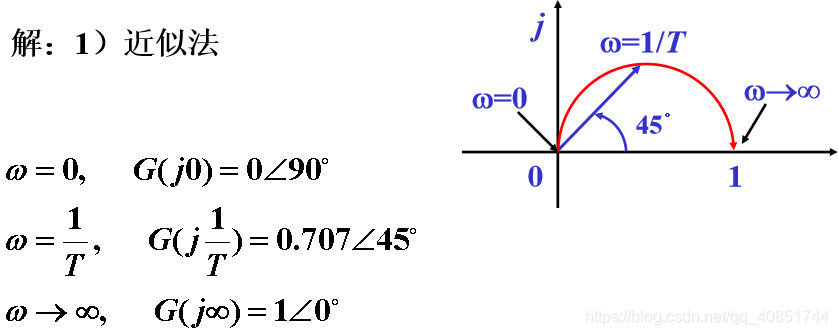
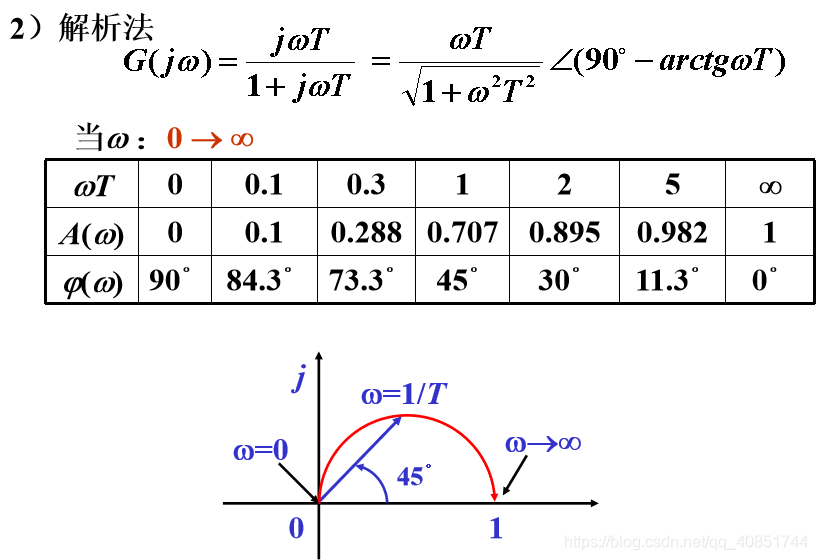
1、求图所示RC电路的频率特性,并求该电路正弦信号作用下的稳态输出响应。
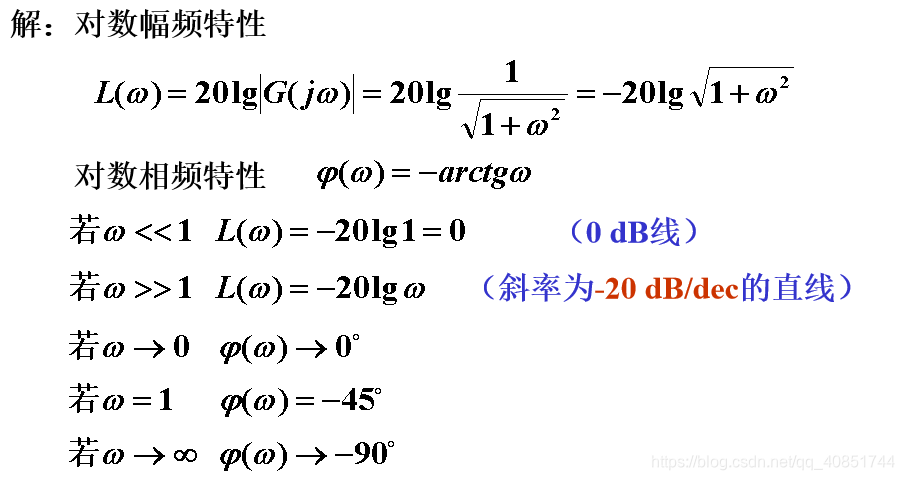
2、设系统的频率特性如下,试画出该系统的幅相曲线与对数频率曲线。
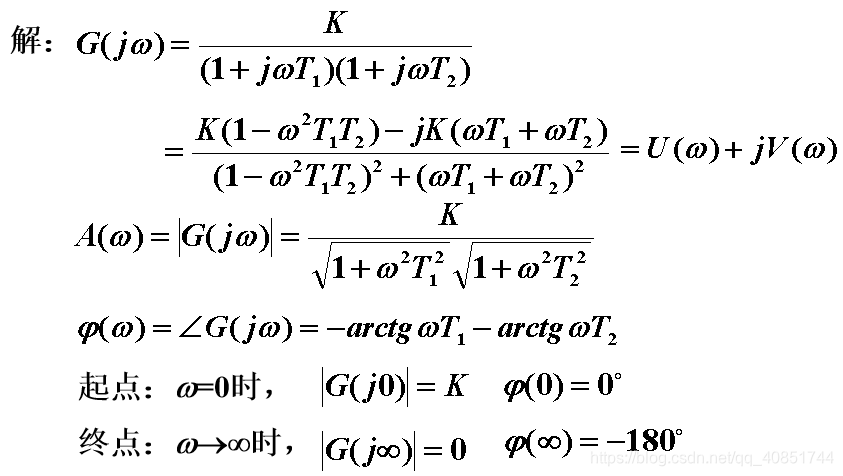
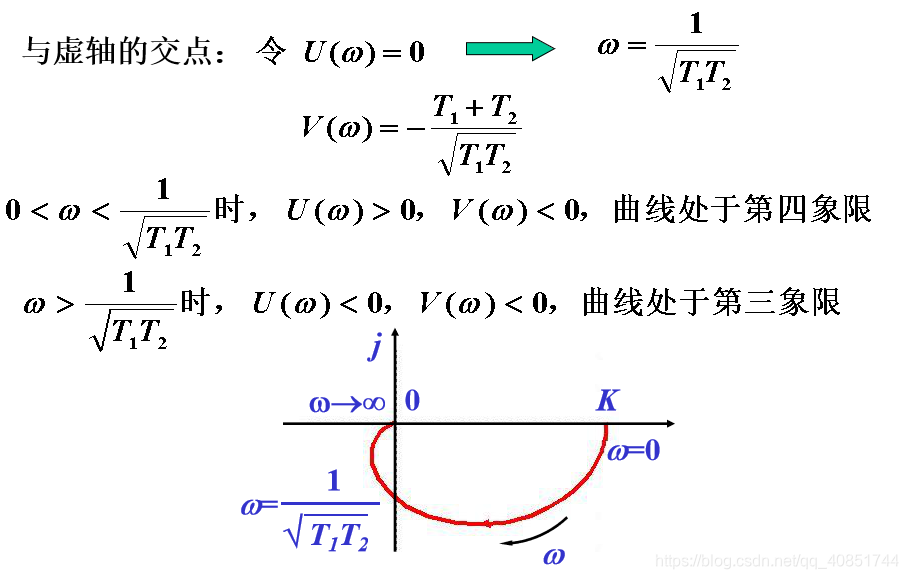
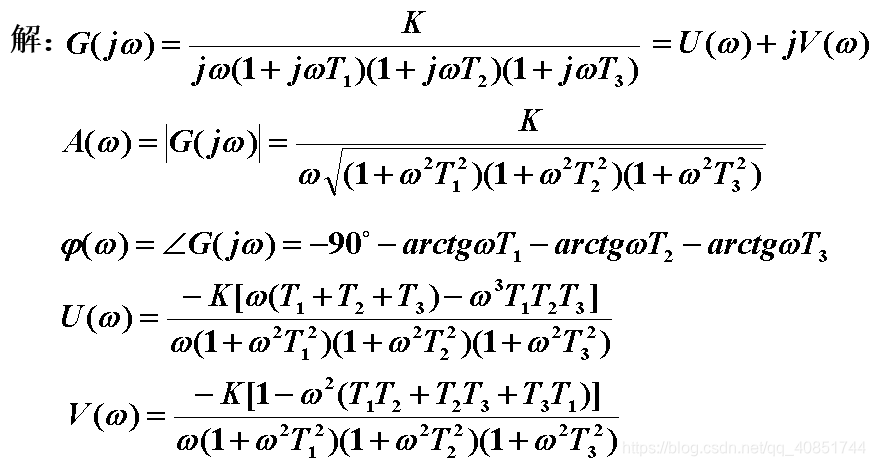
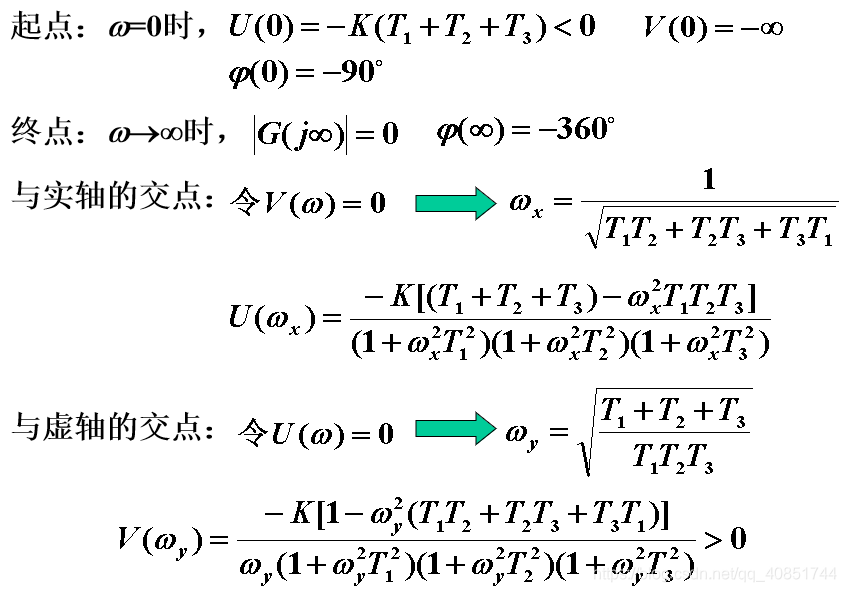
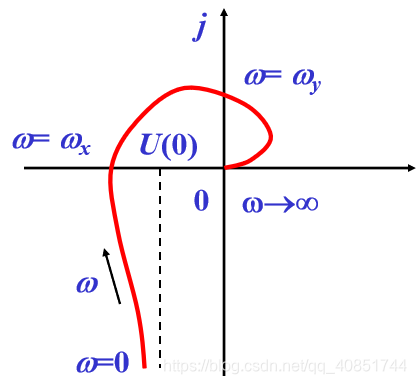
3、设系统的开环传递函数如下,试画出该系统的开环幅相曲线。
4、试绘制系统的奈氏图
5、设某零型系统的开环传递函数如下,试概略绘制系统开环幅相曲线。
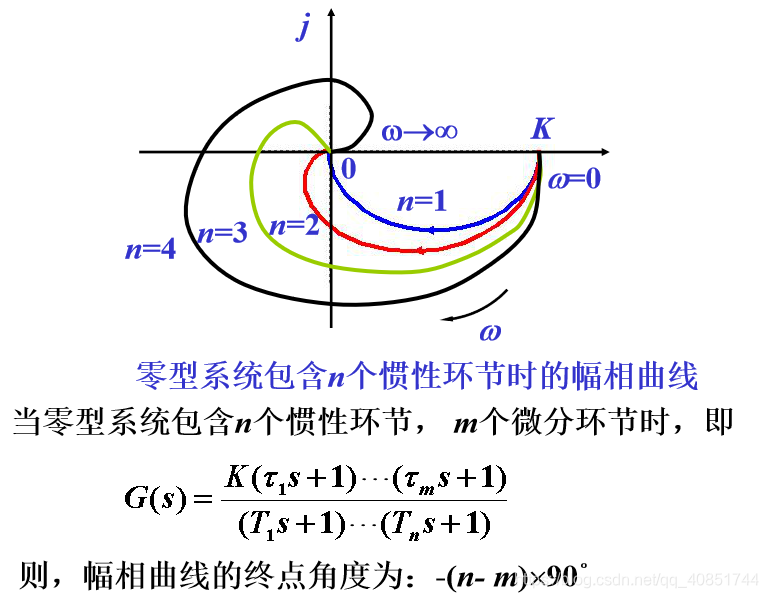
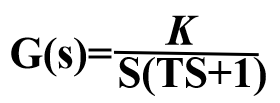
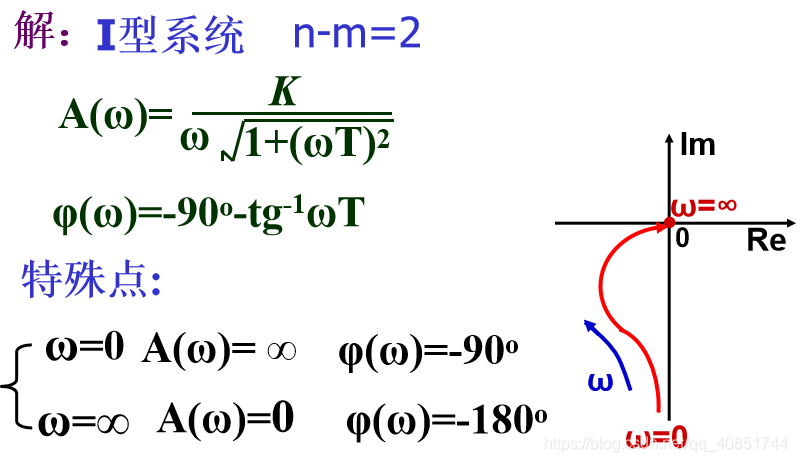
6、设某I型系统的开环传递函数如下,试概略绘制系统开环幅相曲线。
7、设系统的开环传递函数为试判断闭环系统的稳定性。
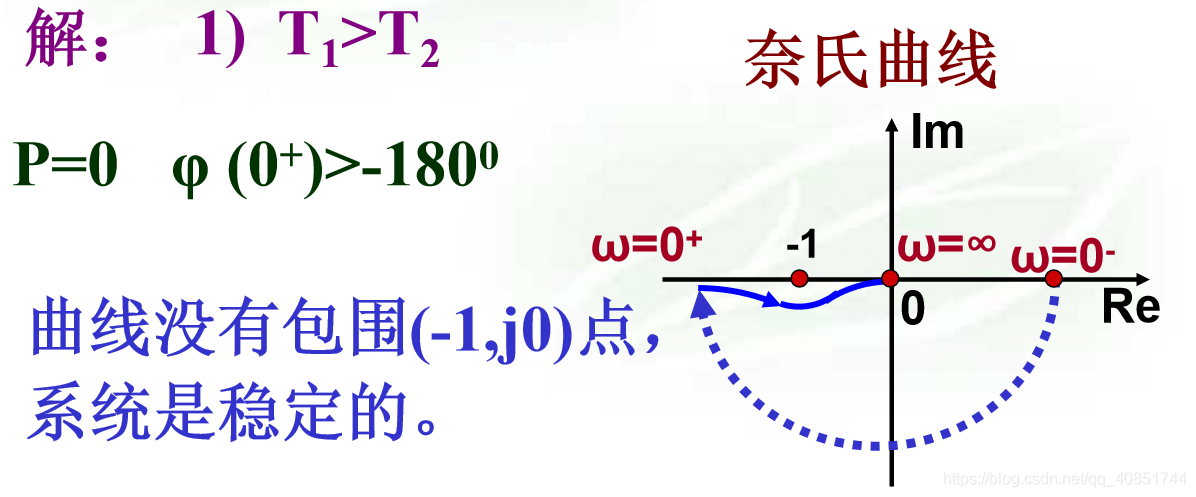
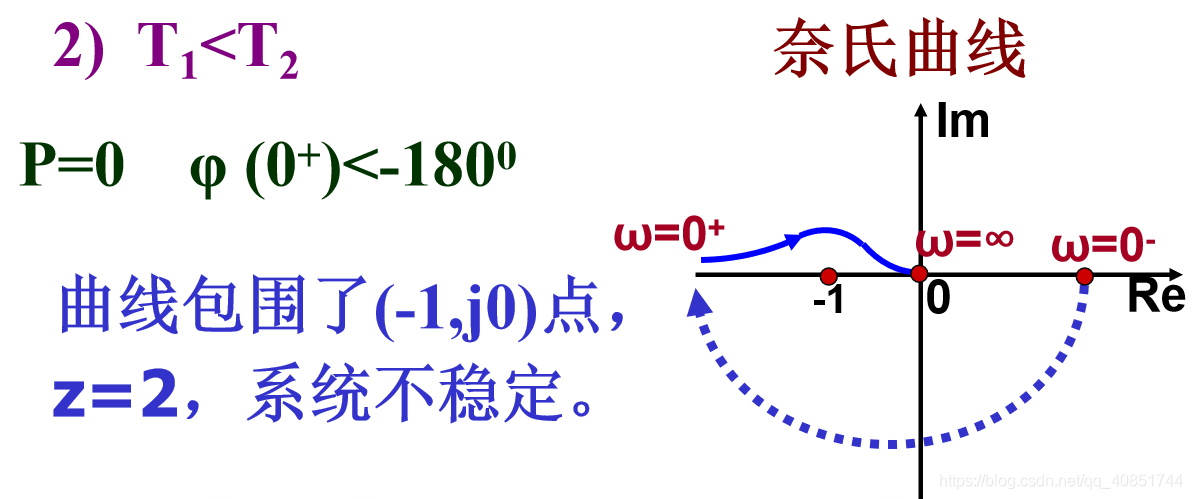
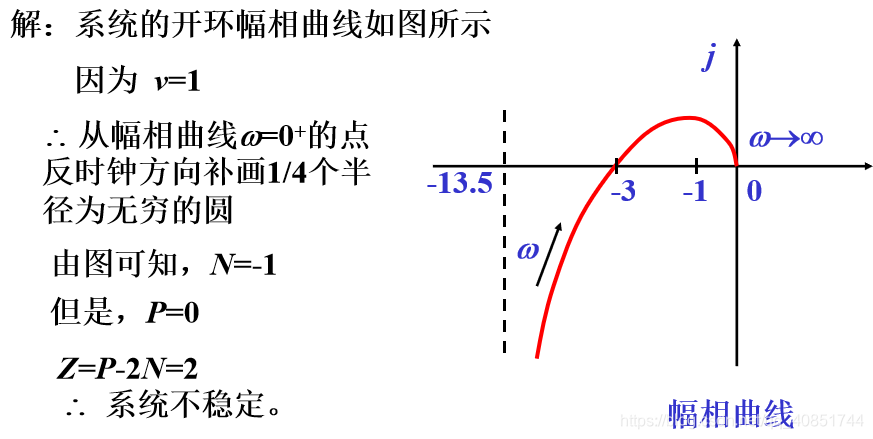
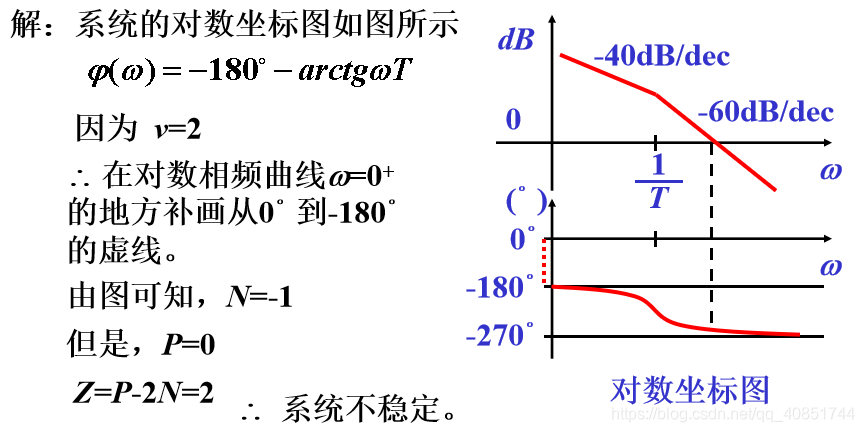
8、系统的开环传递函数如下,试用奈氏判据判断系统的稳定性。
9、系统的开环传递函数如下,试用对数频率稳定判据判断系统的稳定性。
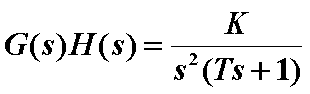
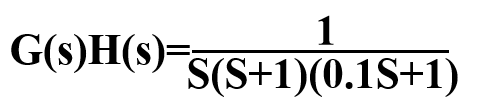
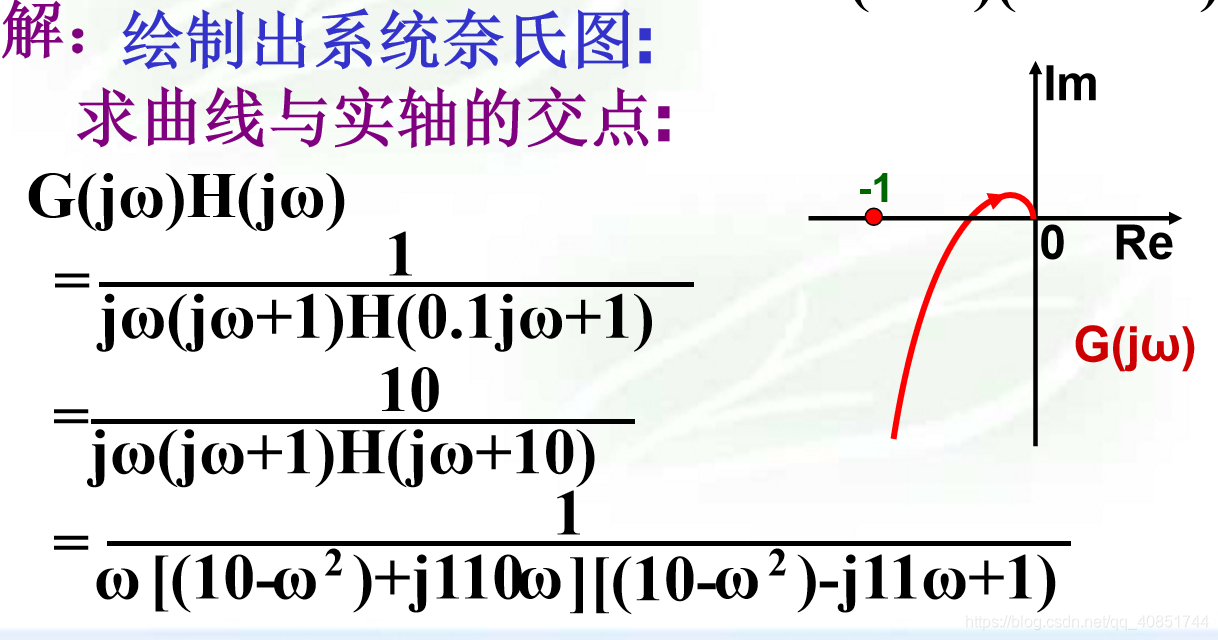
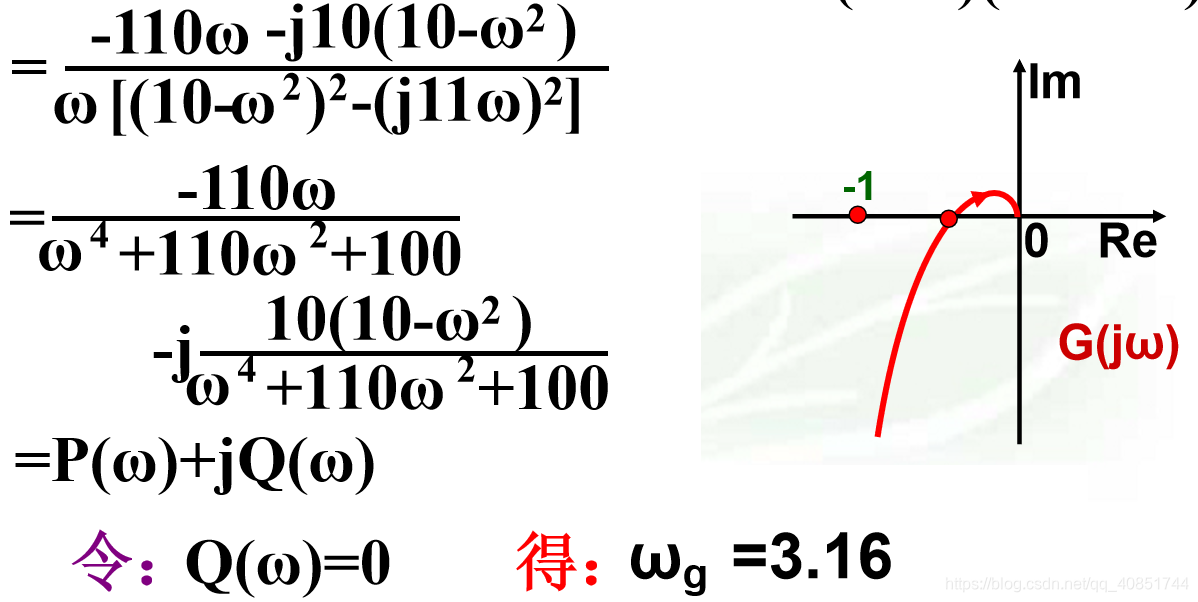
10、已知系统的开环传递函数,求系统的幅值裕量和相位裕量
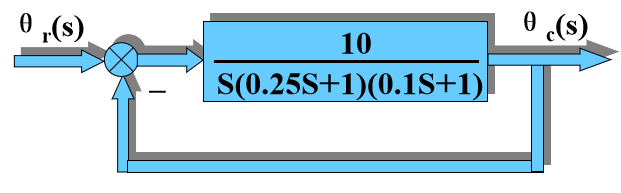
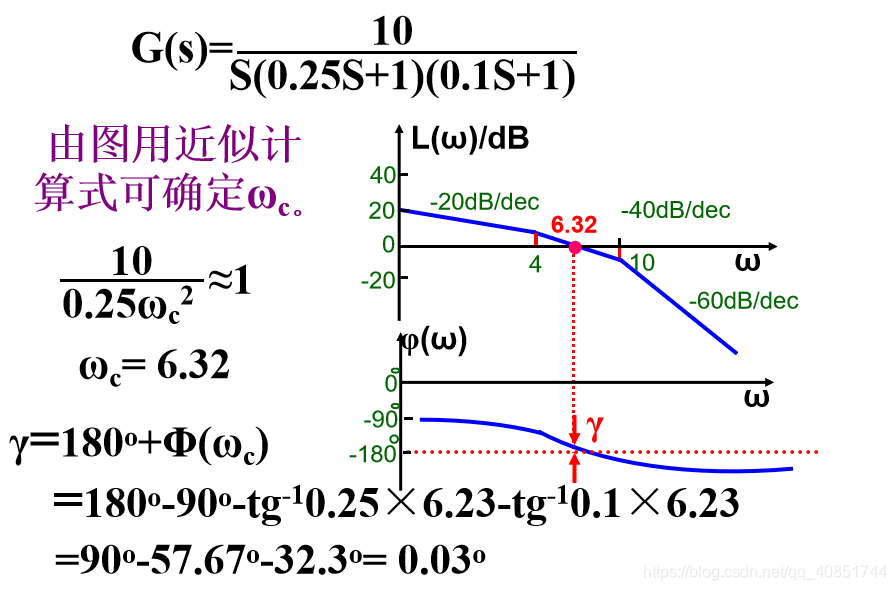
11、某位置控制系统的结构如图。试绘制系统开环的伯德图,并确定系统的相位稳定裕量γ 。

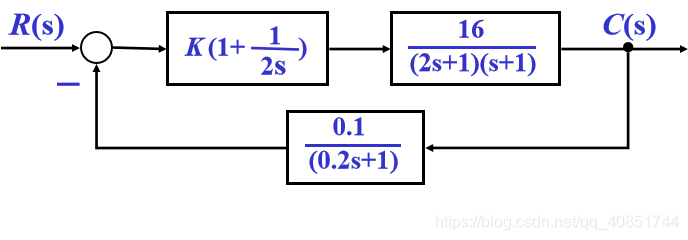
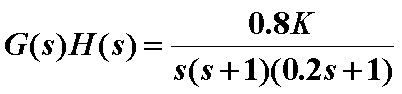
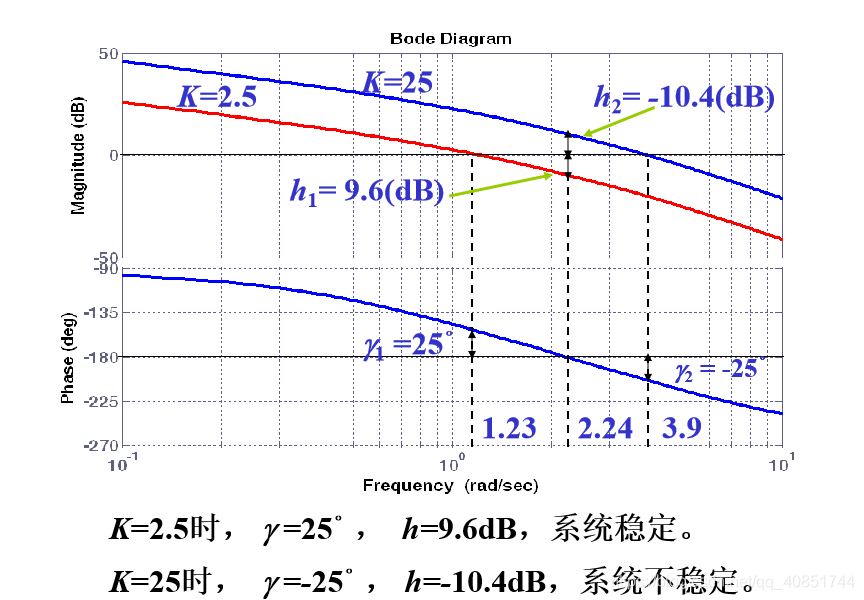
12、某控制系统如图所示,试求K=2.5 和K=25时,系统的幅值裕度和相角裕度。

13、最小相位系统的开环对数频率特性曲线如图,试分析中频段与系统相对稳定性的关系。
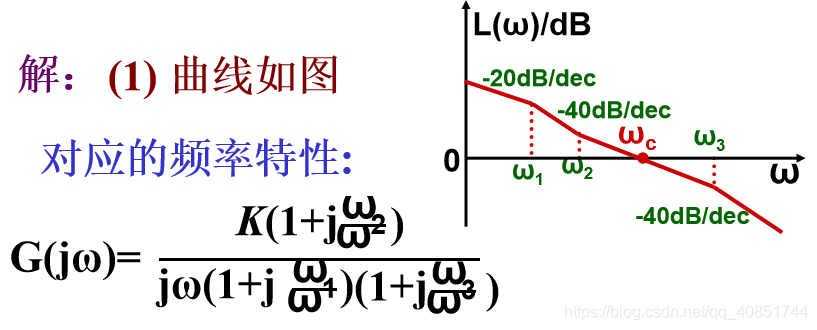
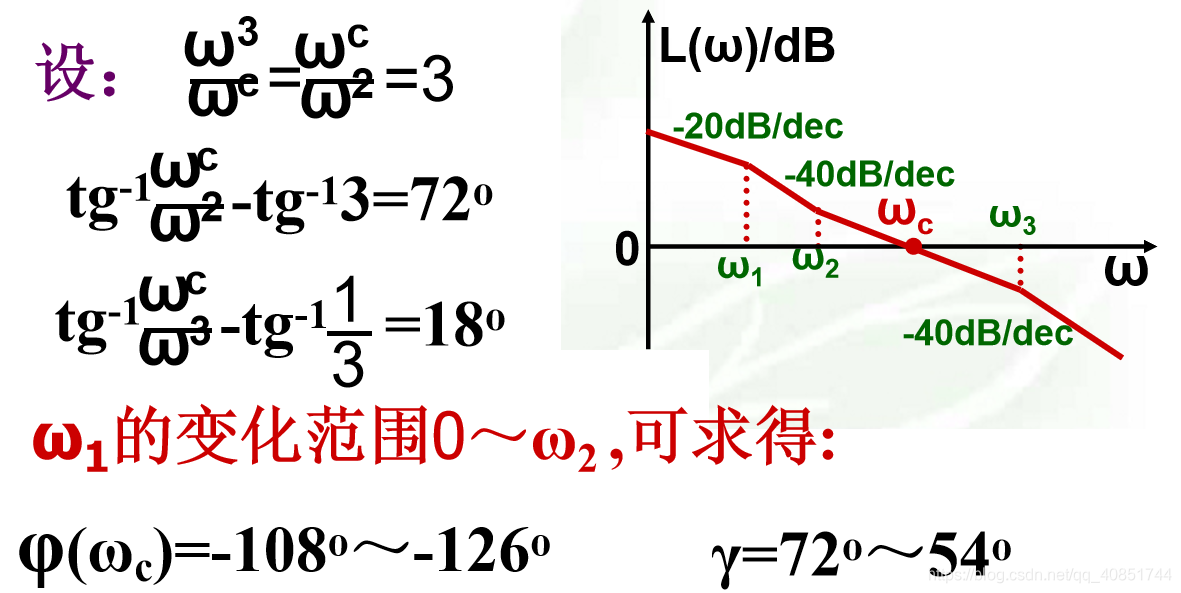
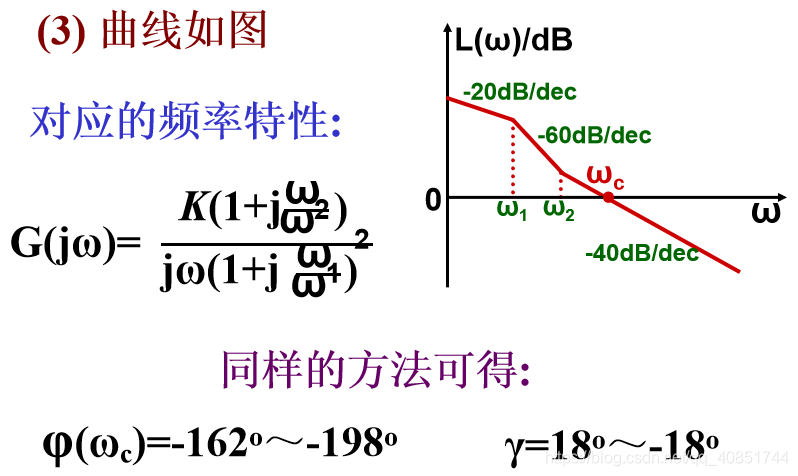
14、采用频率法分析随动系统的性能,求出系统的频域指标ωc、γ和时域指标 σ%、 ts。
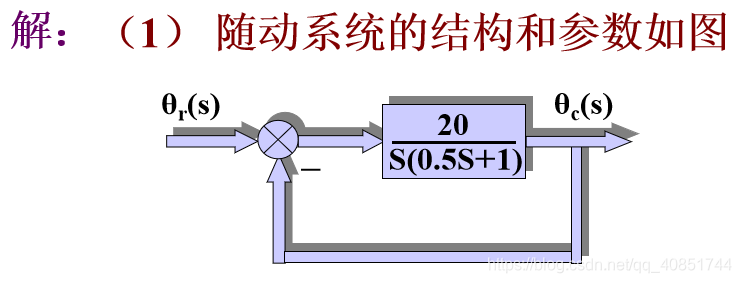
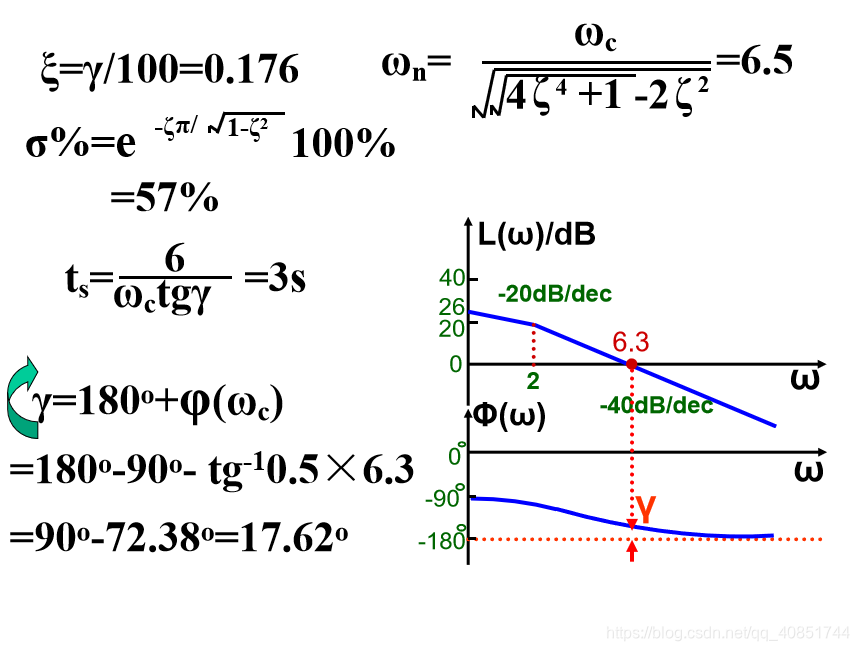
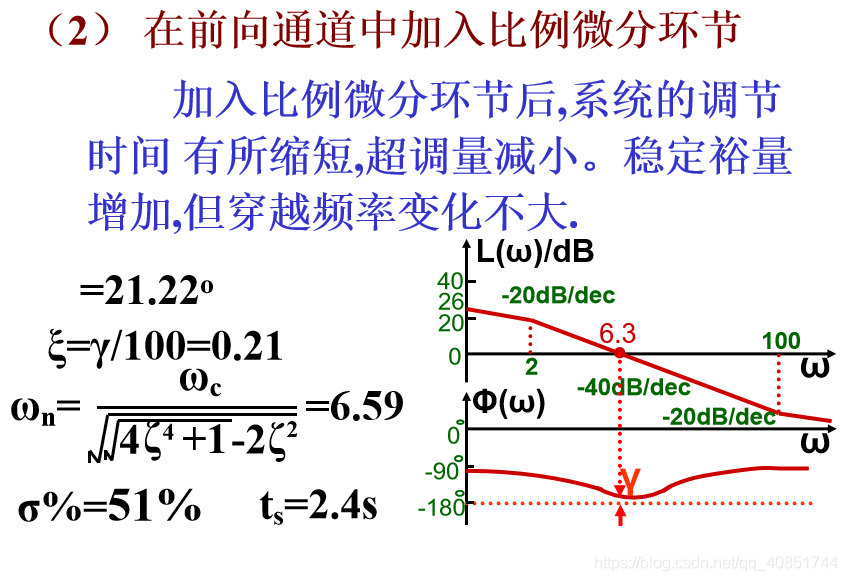
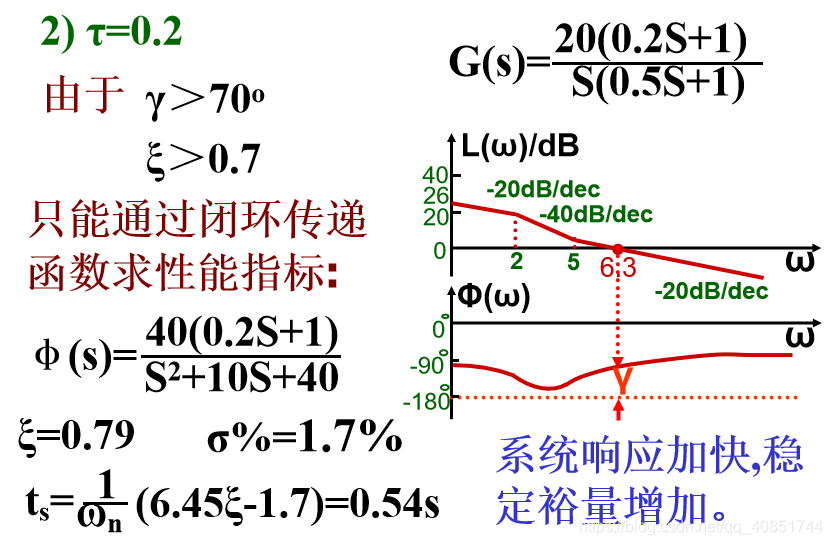
第六章
1、系统结构如图所示.试设计超前校正装置的参数。
2、设一系统结构如图所示。试设计滞后校正装置。
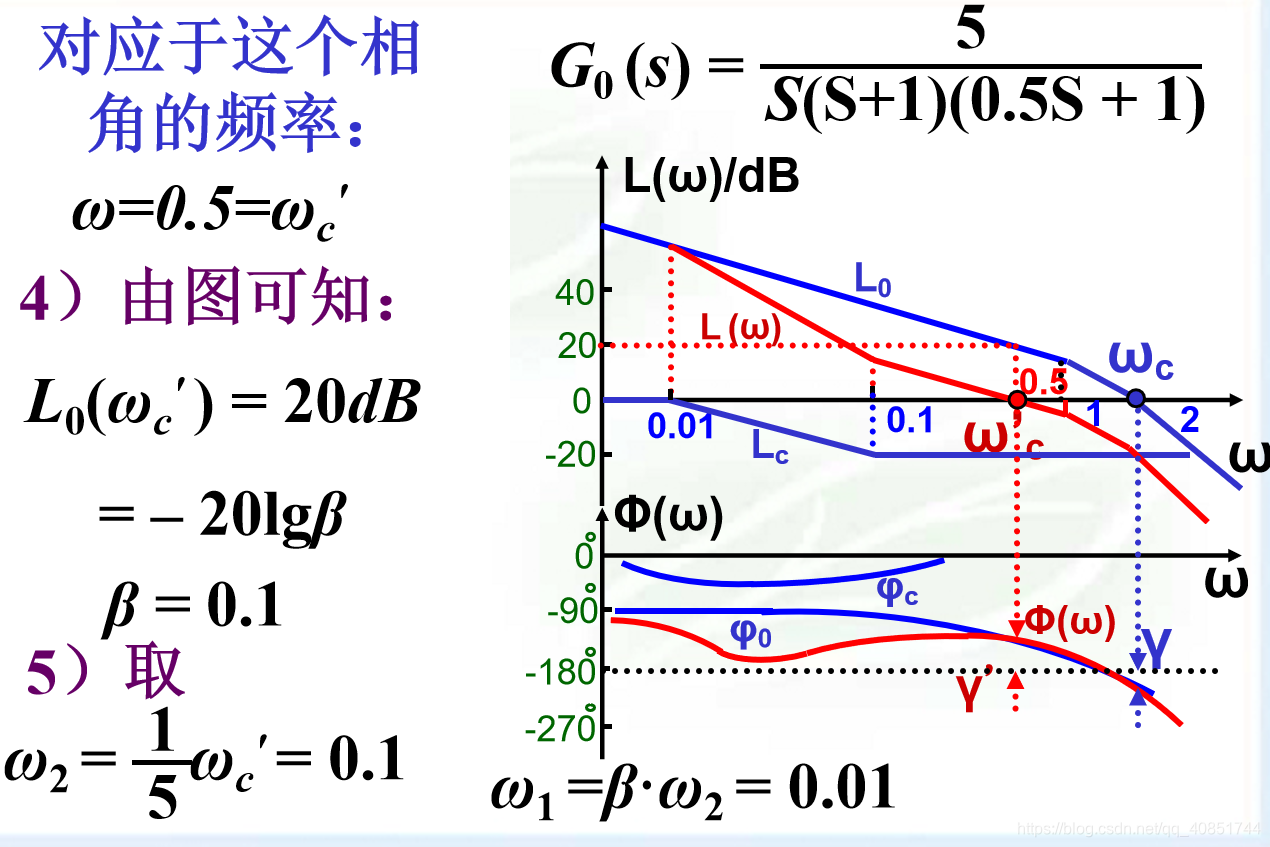
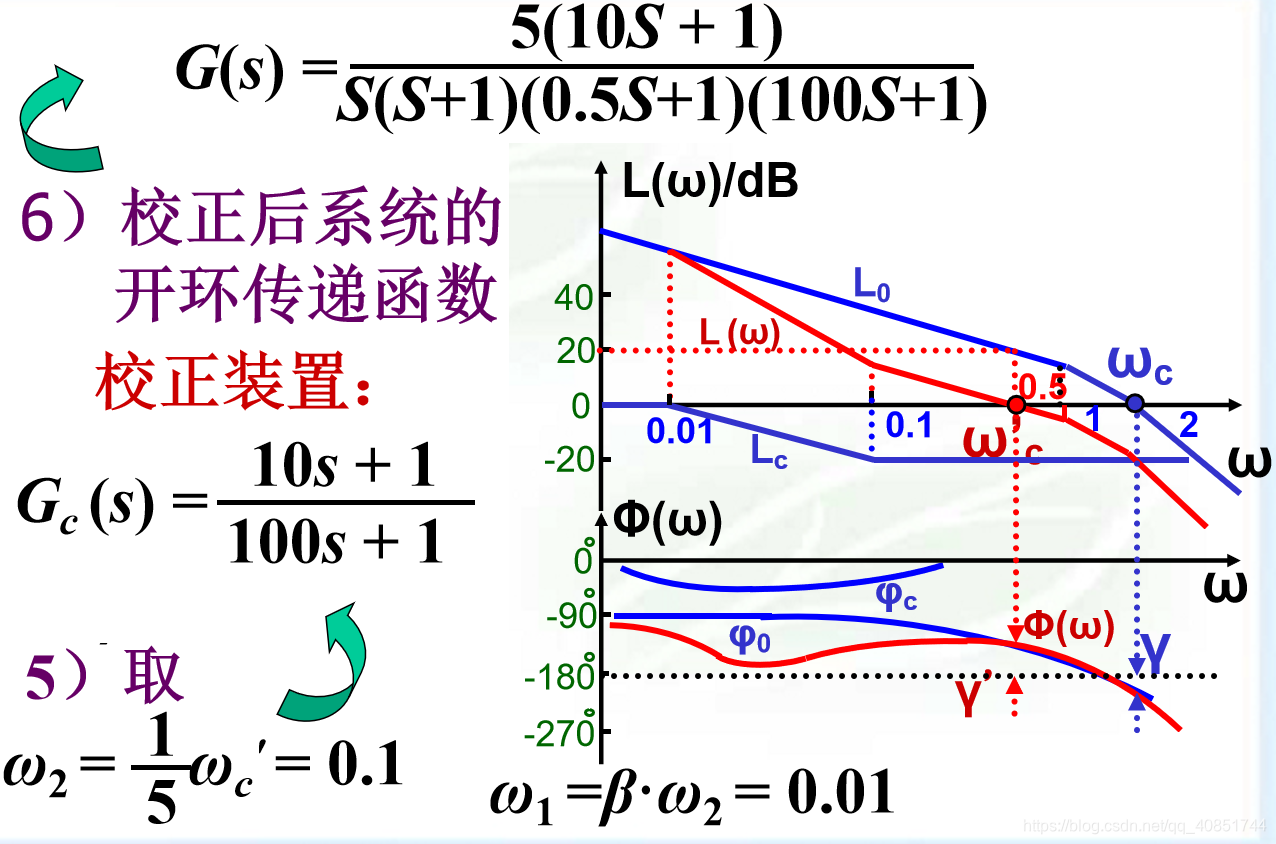
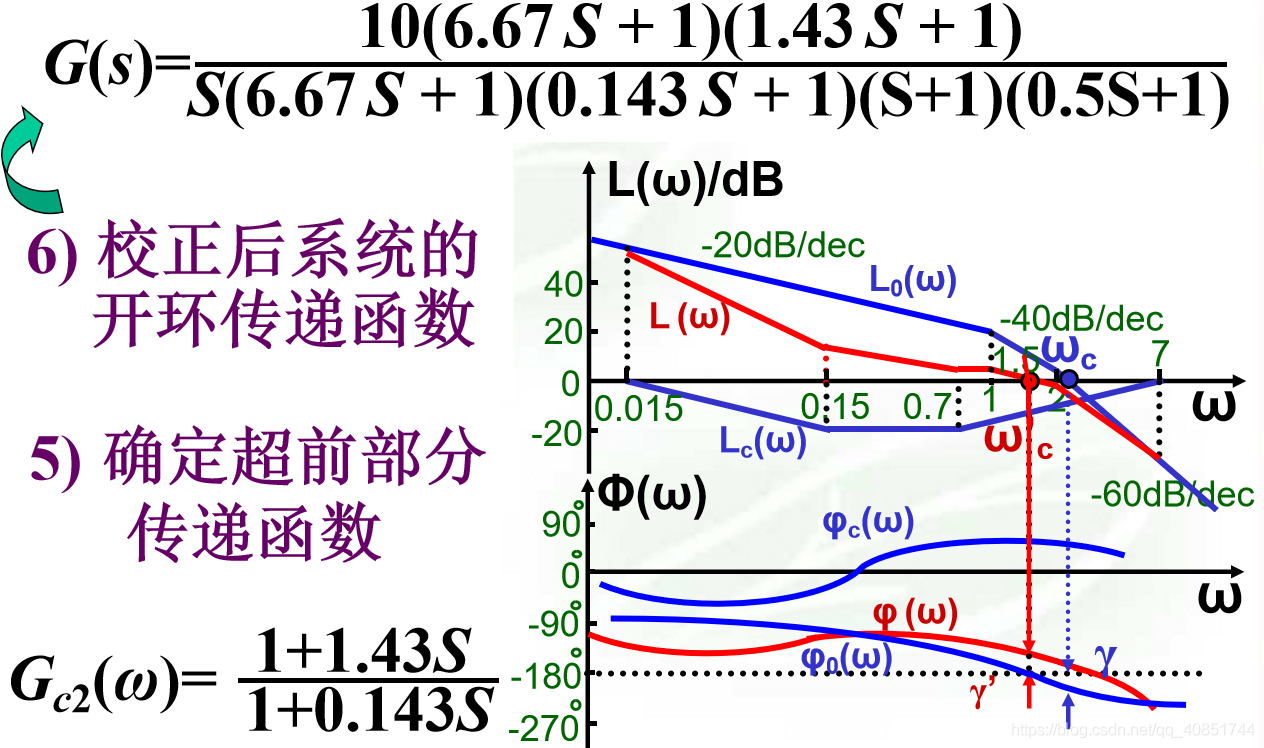
3、设单位反馈系统的开环传递函数,试设计一滞后-超前校正装置。
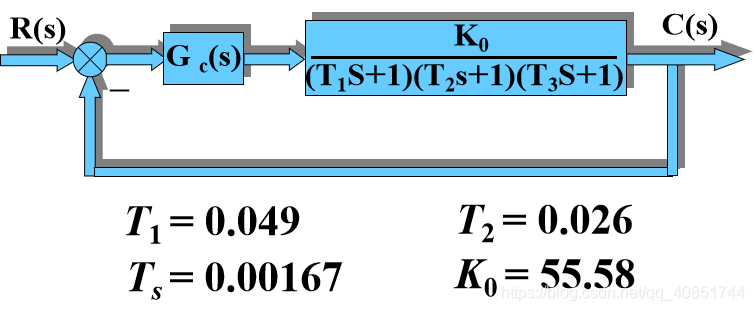
4、系统动态结构图如图所示。要求阶跃信号输入之下无静差,满足性能指标
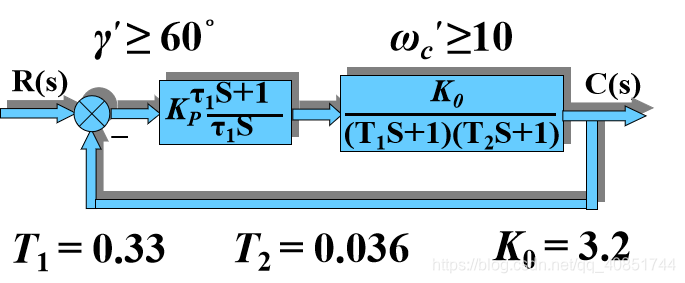

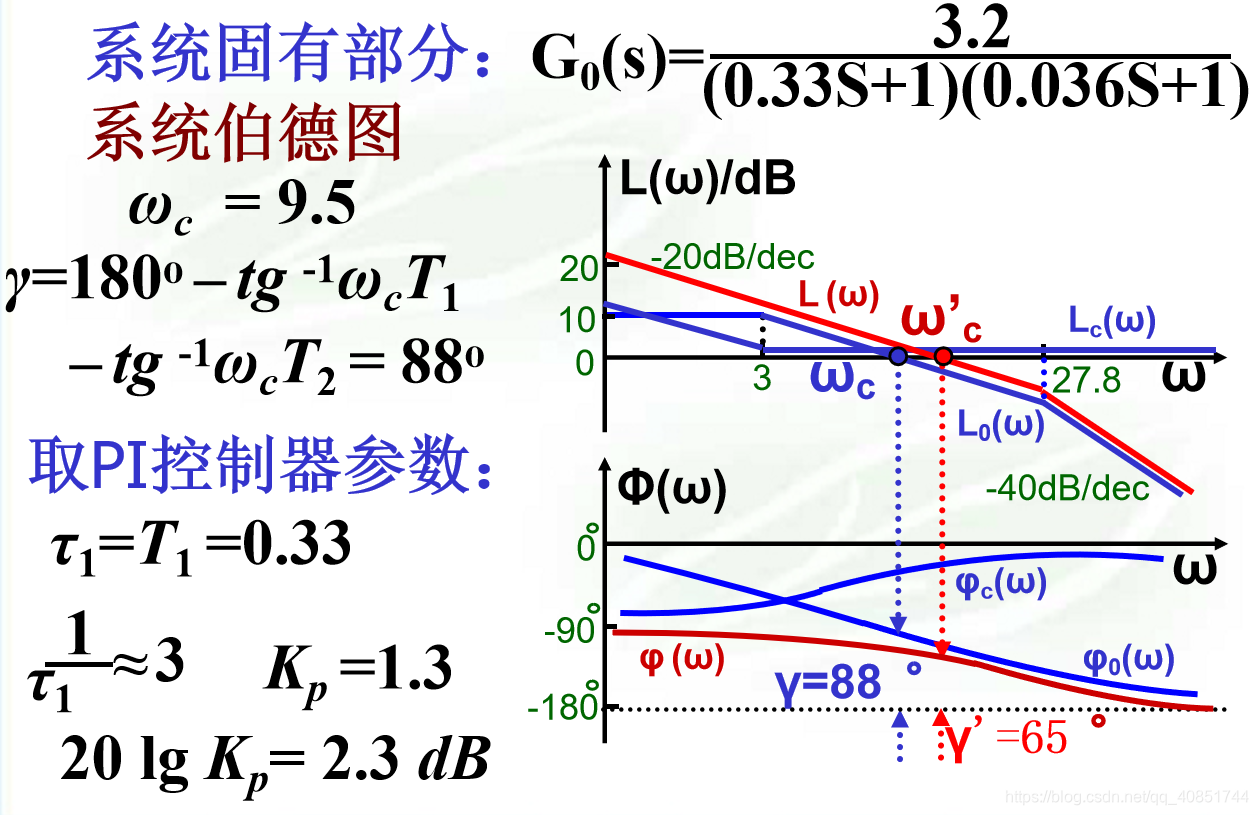
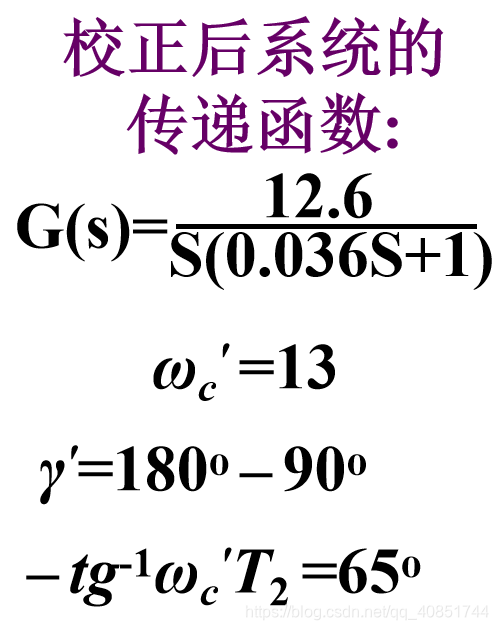
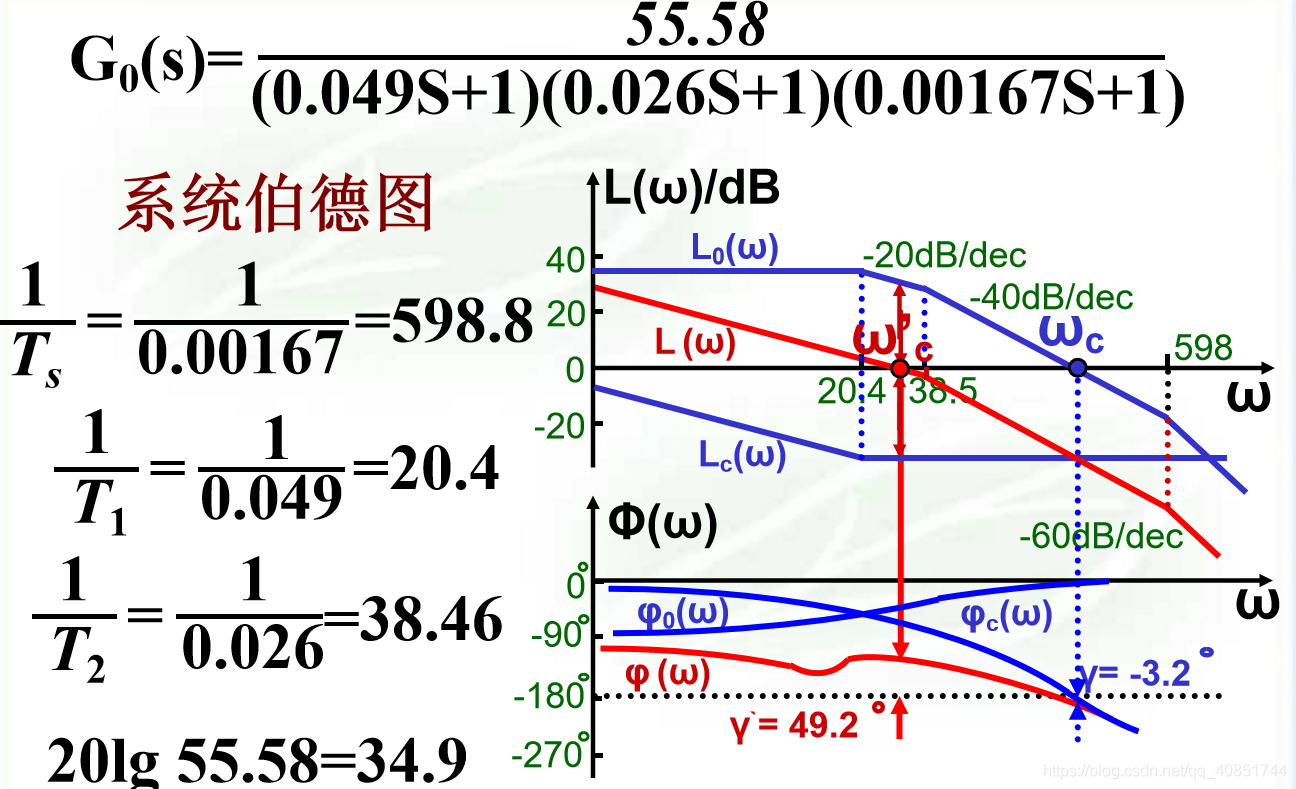
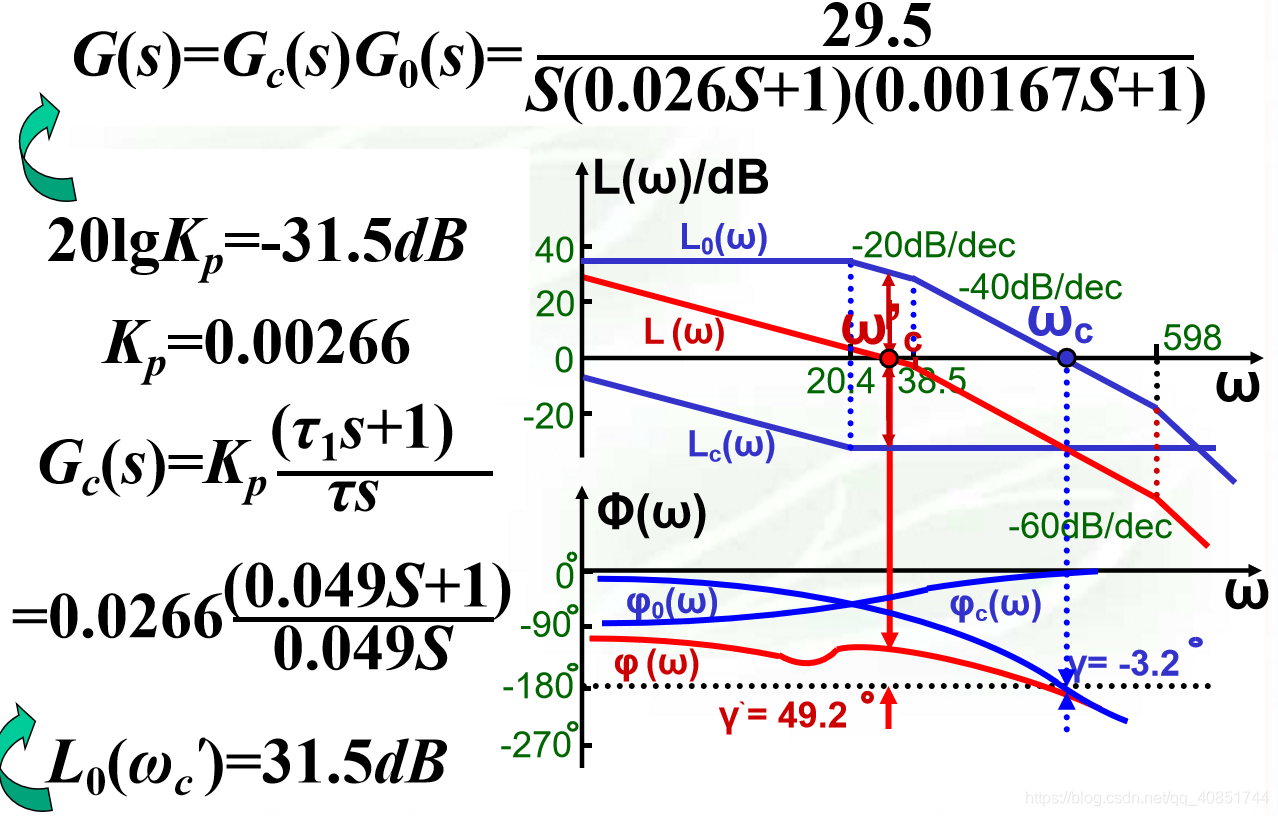
5、调速系统动态结构图如图,要求采用PI校正,使系统阶跃信号输入下无静差,并有足够的稳态裕量。


6、已知系统的固有传递函数,试将系统校正成典型I型系统。
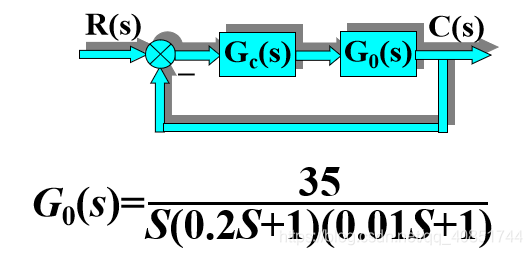
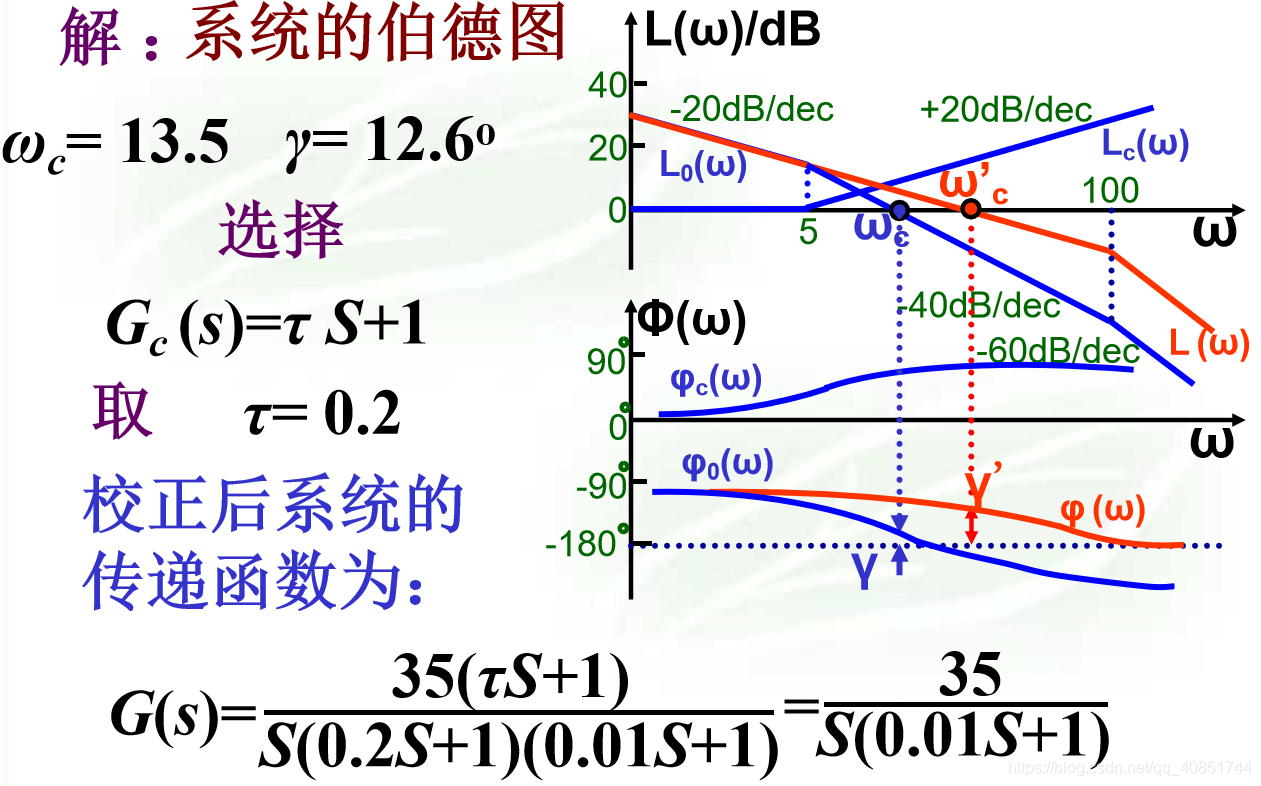
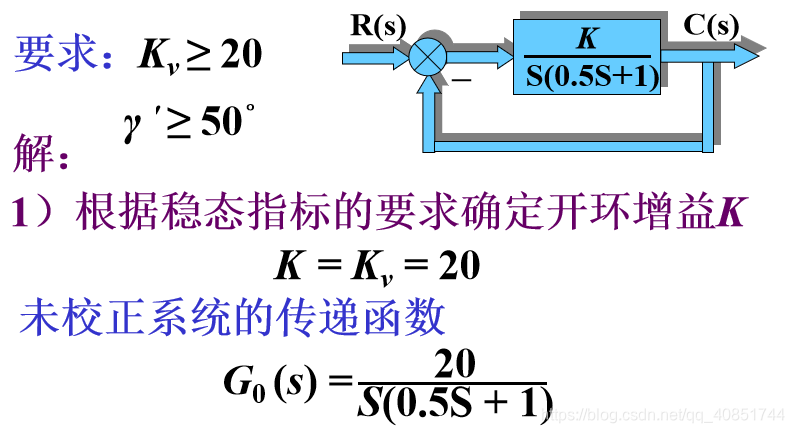
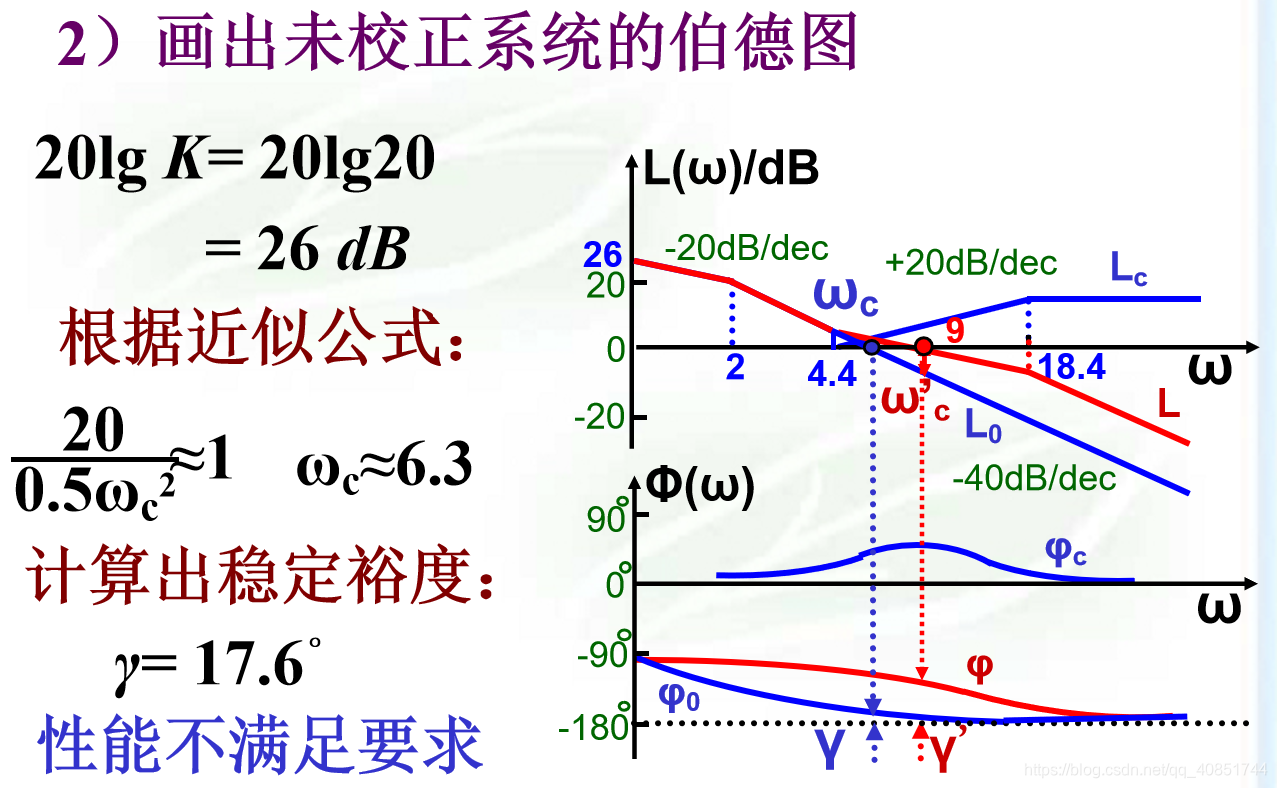
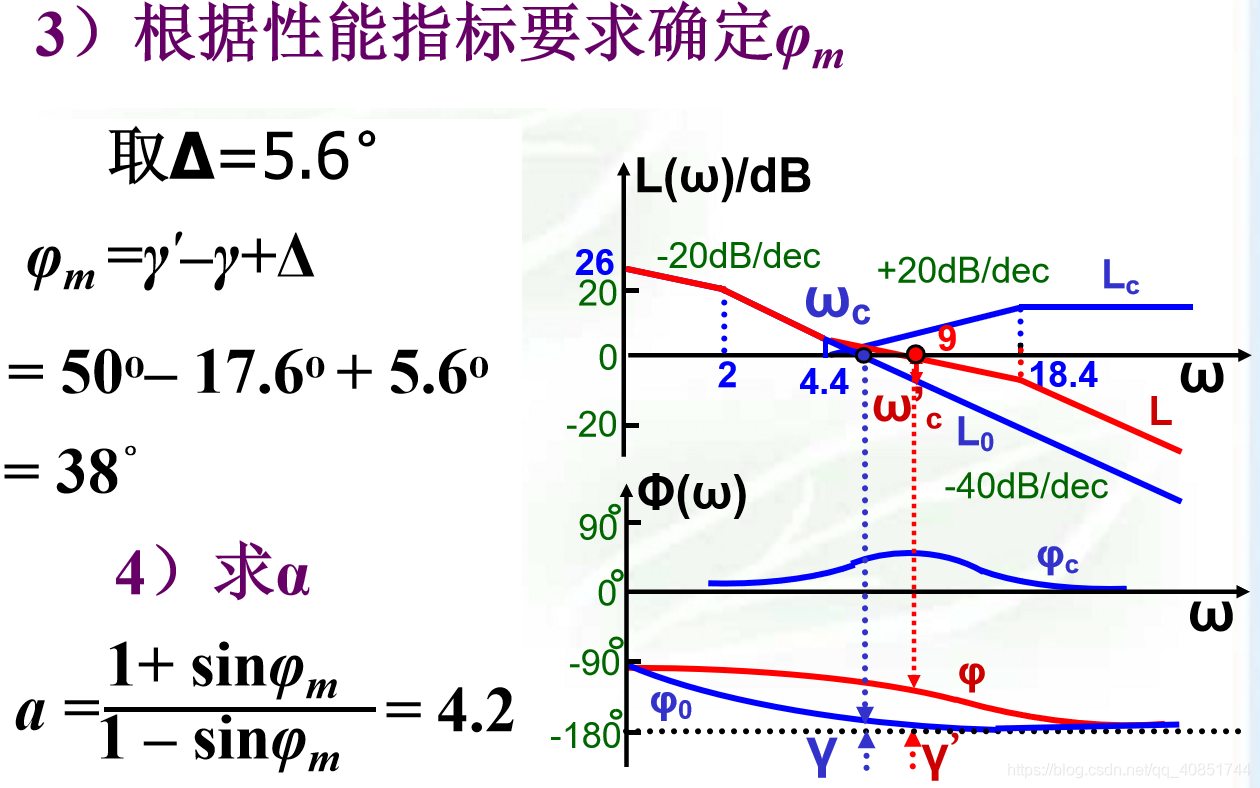
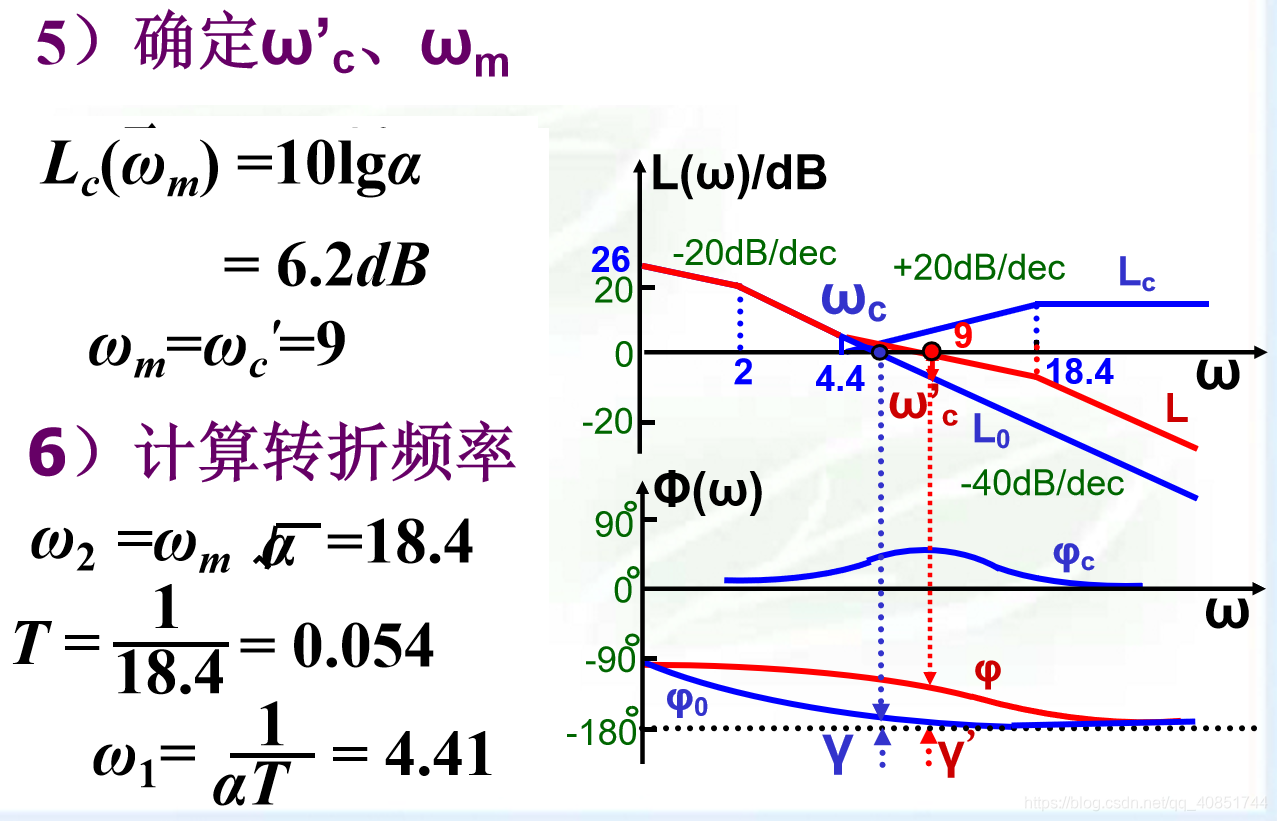
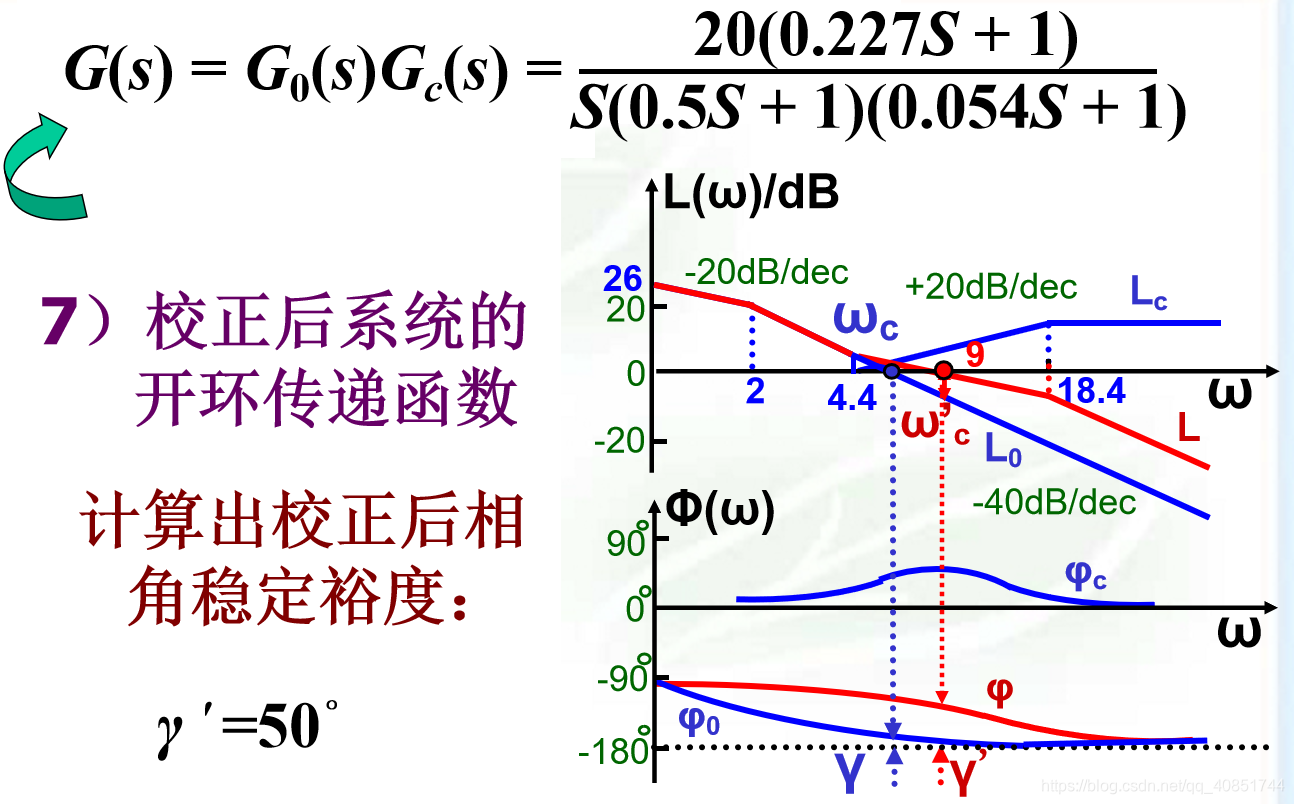
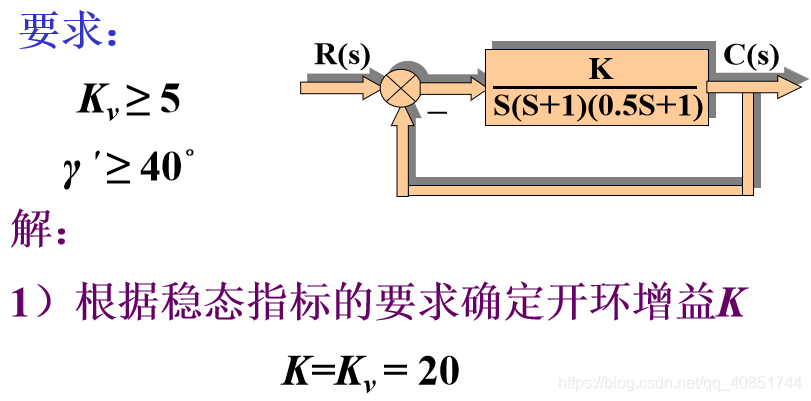
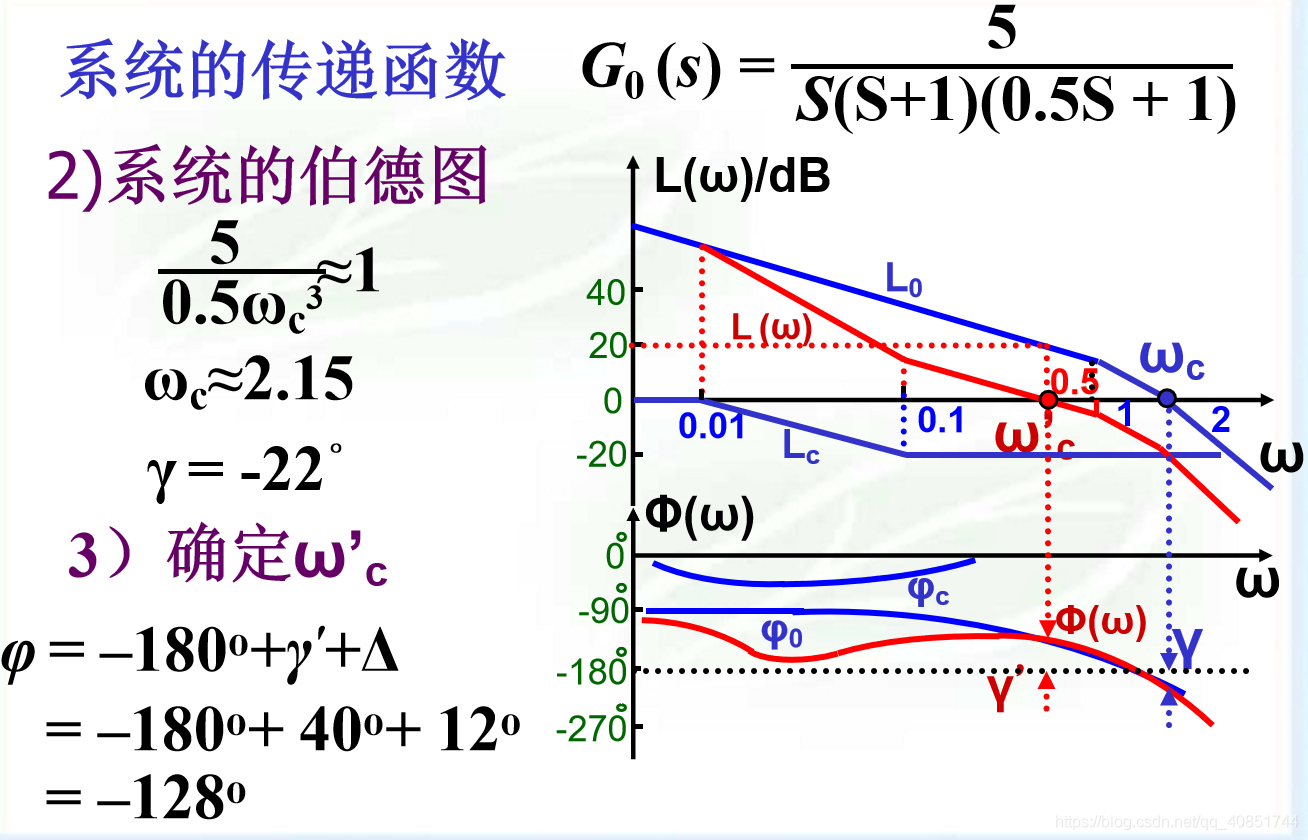
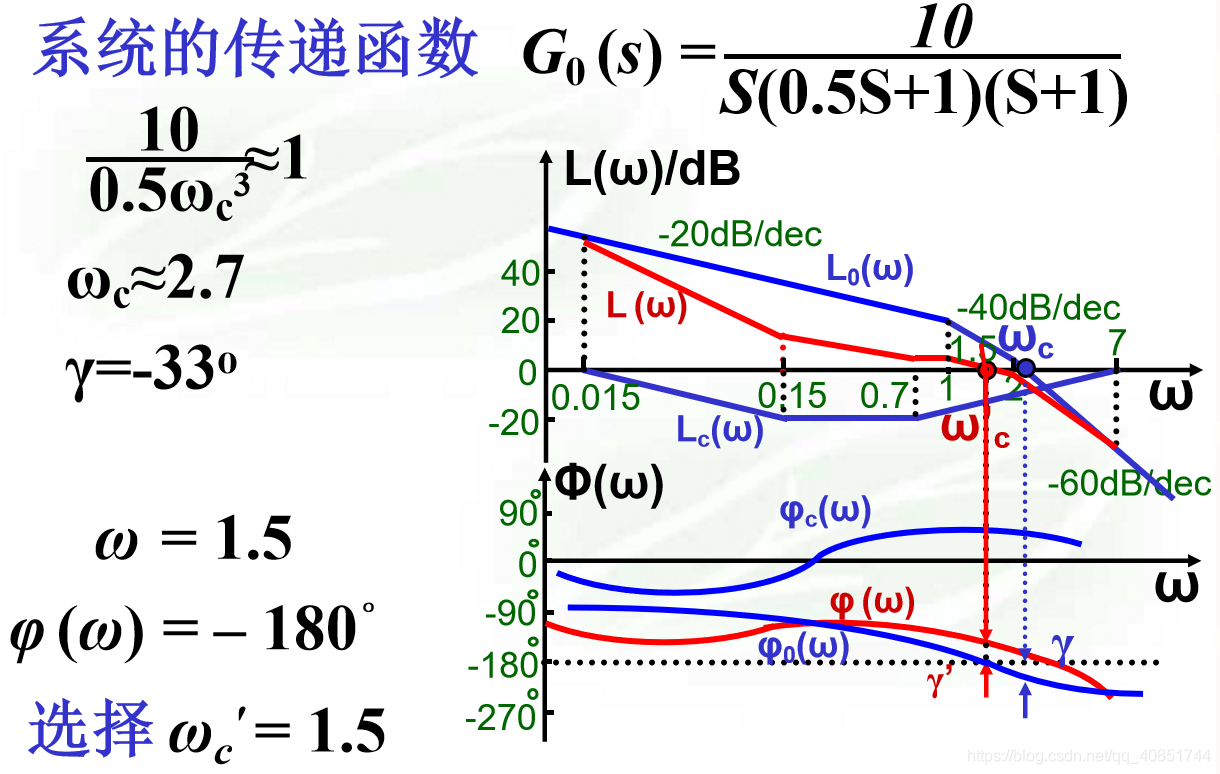
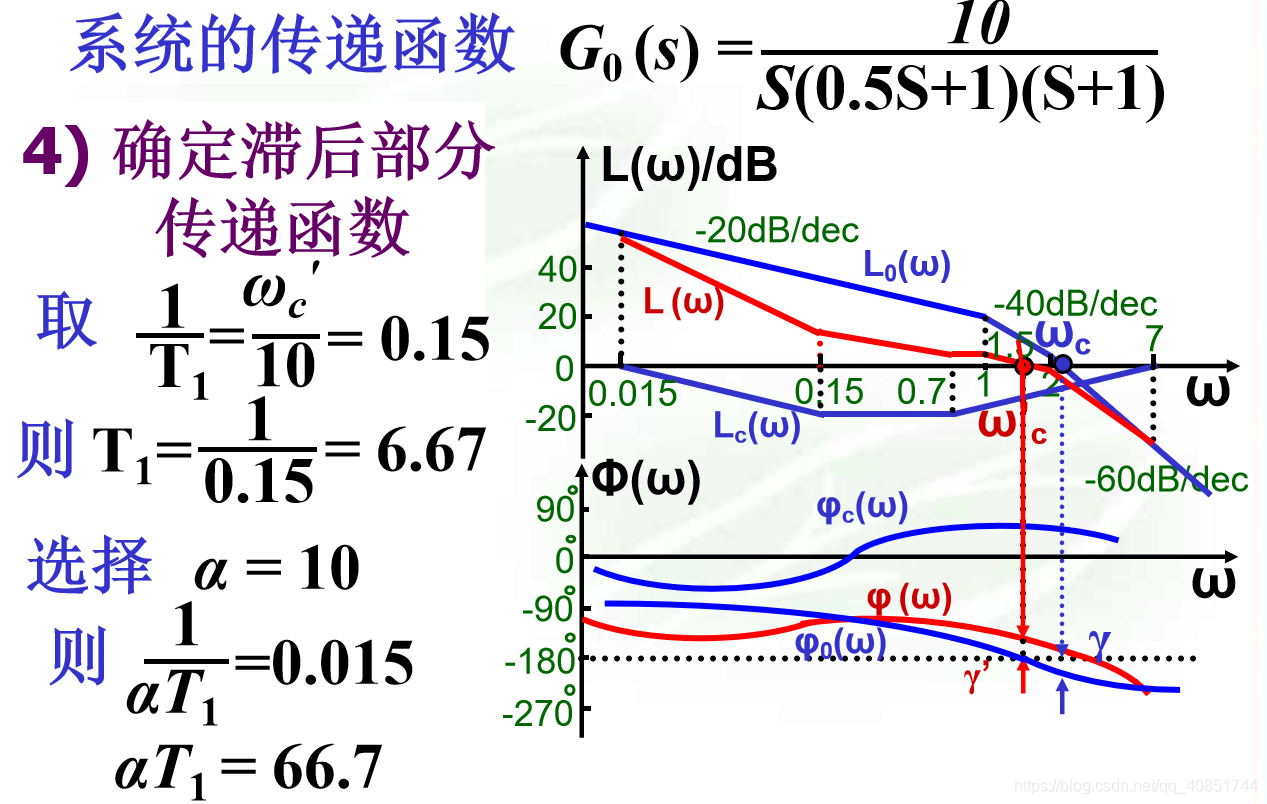
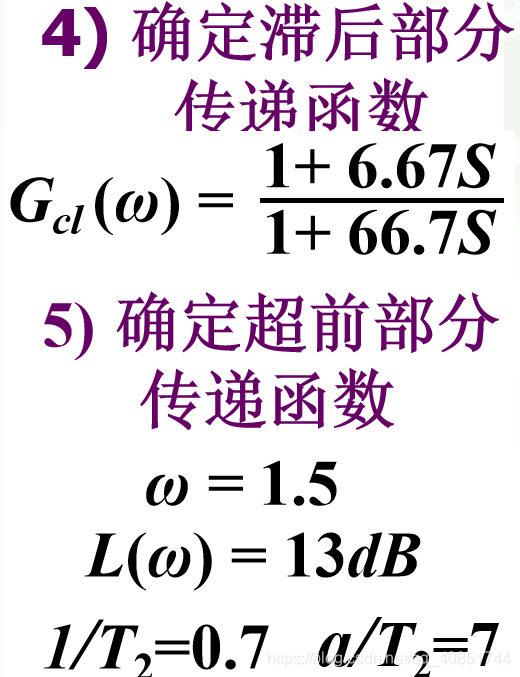
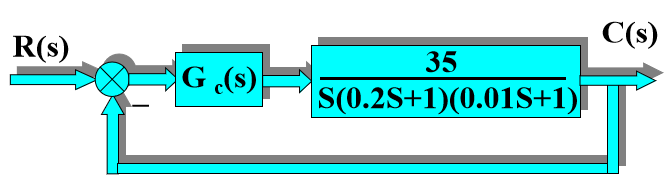
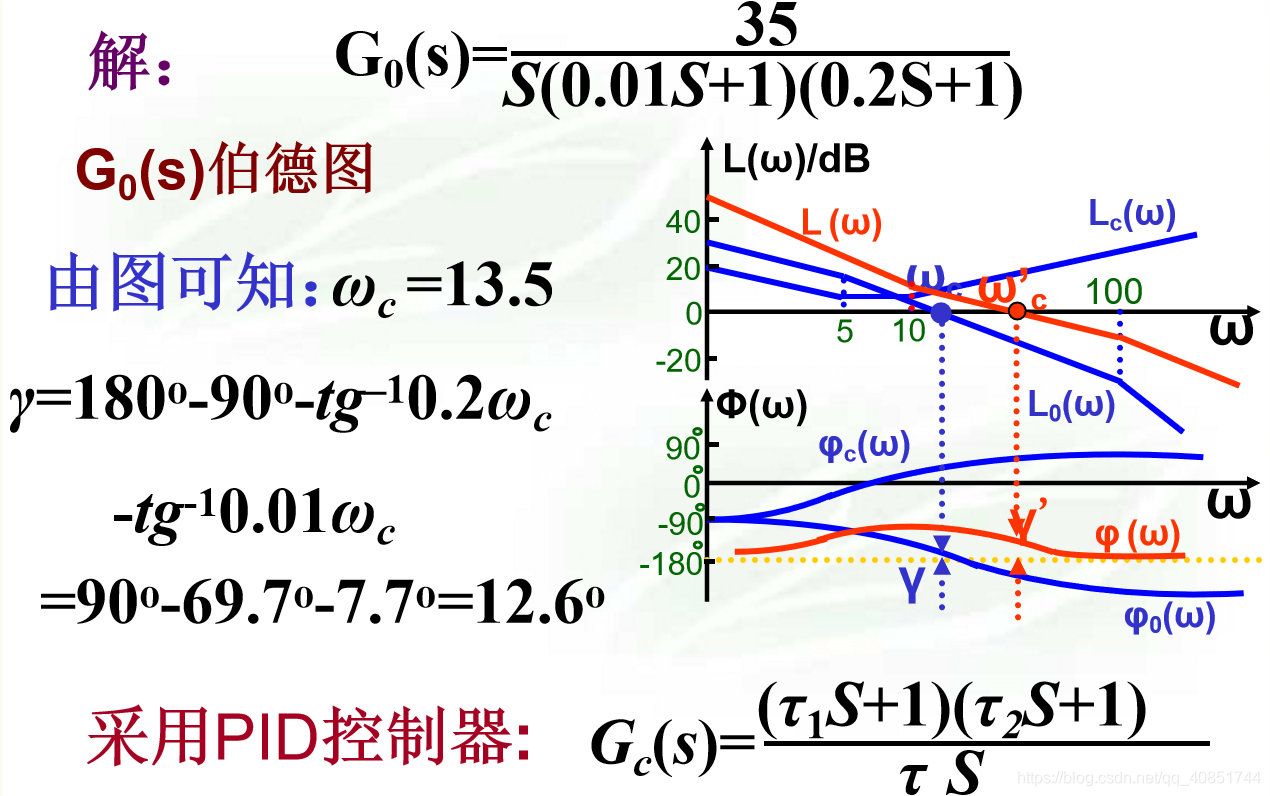
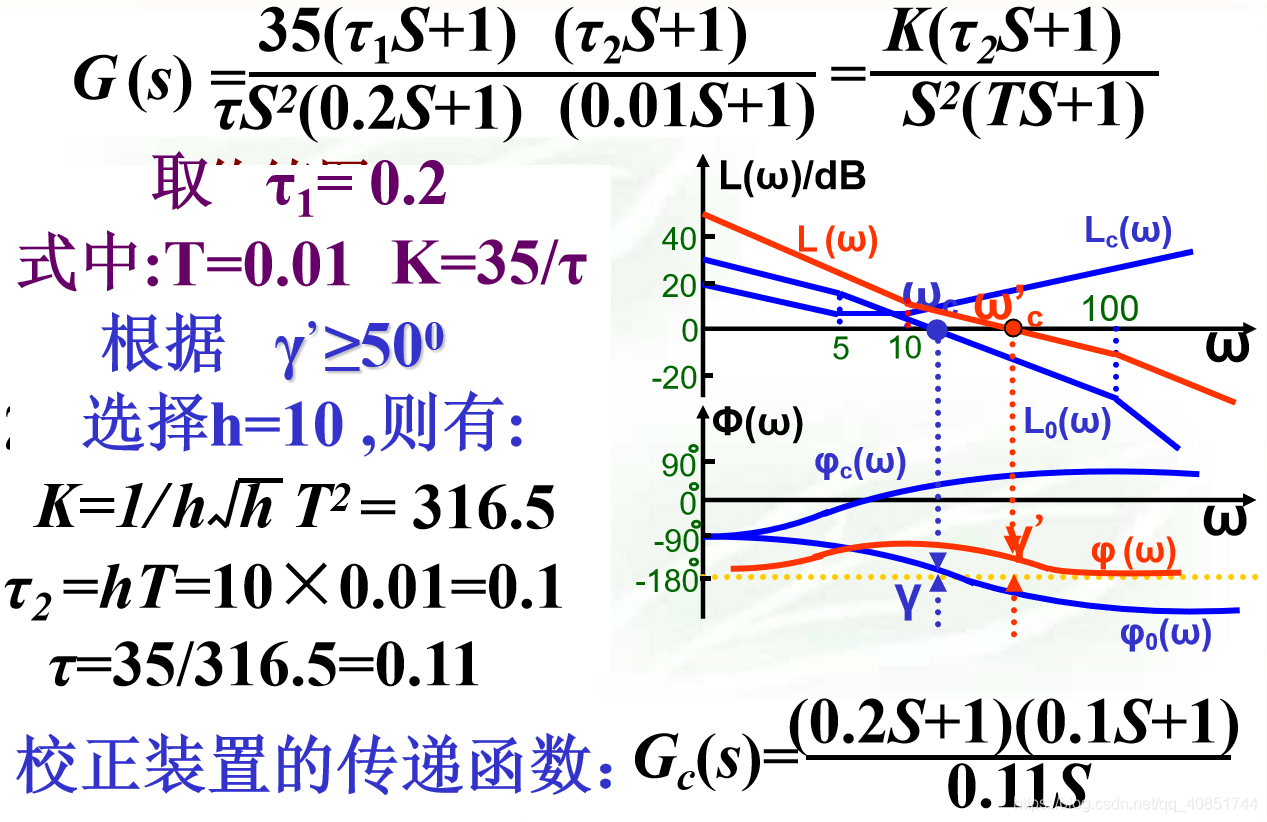
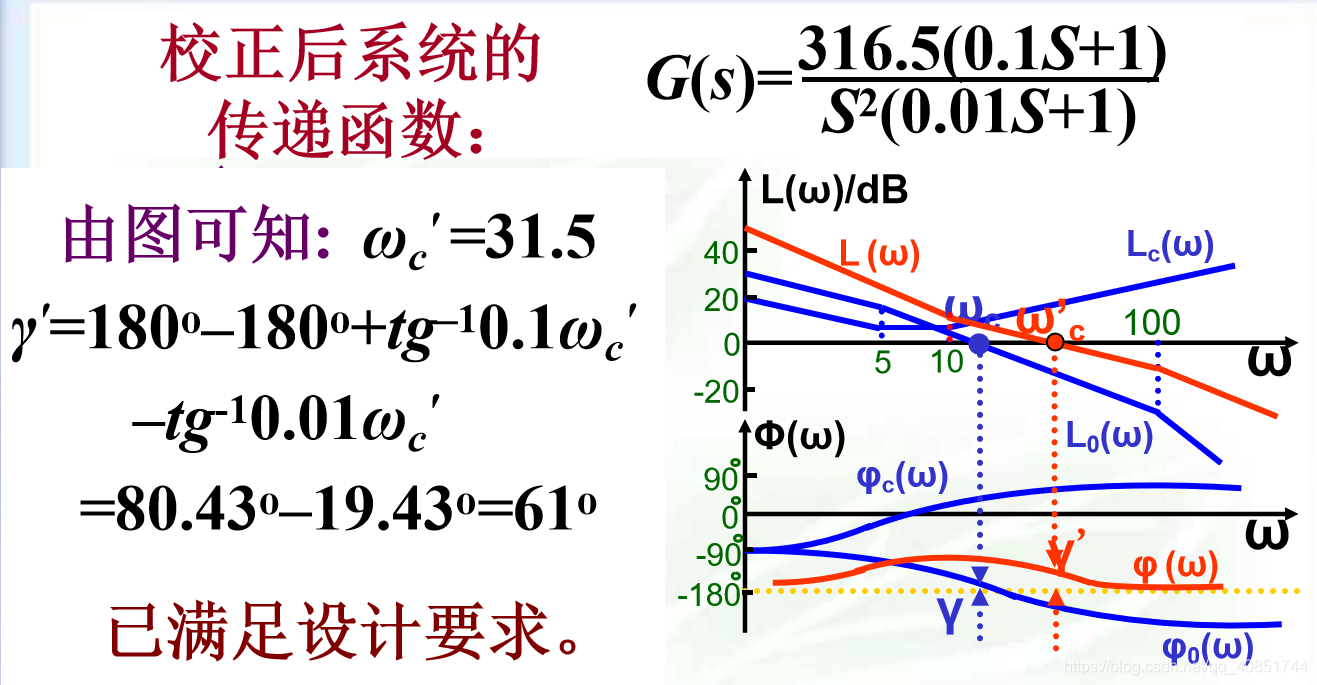
7、已知系统的结构,要求系统在斜坡信号输入之下无静差,并使相位裕量γ’ ≥ 500。试设计校正装置的结构和参数。














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









