







目录
13.3.1.1 PWM控制模式 PWM Control Modes
13.3.1.2 接口模式Device Interface Modes
13.3.1.4.2 TDRIVE: MOSFET 栅极驱动控制
这个系列将全面解析DRV835的功能、配置以及软硬件设计。最后打算设计出原理图和PCB以及FOC程序编写。
13.3.1.1 PWM控制模式 PWM Control Modes
DRV8353M系列提供了四种PWM控制方式。在切换工作模式的时候需要把INLx和INHx拉低(应该是怕导致误操作),在电机的mos运行时不要切换模式。
PWM控制模式可以通过外部引脚或者寄存器修改。
四种工作模式如下(用SPI或者硬件接口配置):
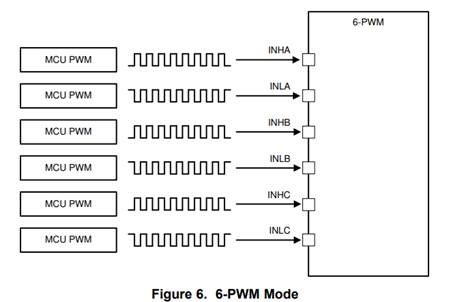
6x PWM Mode: PWM_MODE = 00b or MODE Pin Tied to AGND
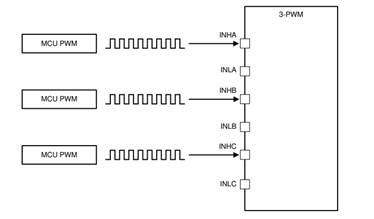
3x PWM Mode: PWM_MODE = 01b or MODE Pin = 47 kΩ to AGND
1x PWM Mode: PWM_MODE = 10b or MODE Pin = Hi-Z
Independent PWM Mode: PWM_MODE = 11b or MODE Pin Tied to DVDD
6x PWM Mode:
在此模式下三相桥输出有三种状态,low、high和Hi-z。输入和输出的真值表如下:
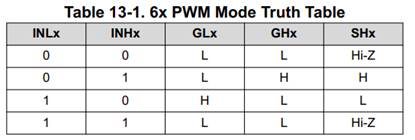
从下图可以看出这个是通过INLx和INHx互补决定输出状态的。这也是常用的一种控制方式。
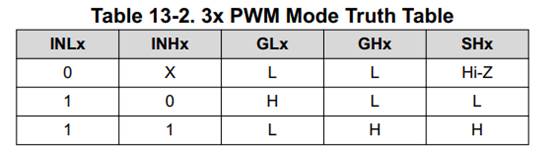
3x PWM Mode:
此方法与6x PWM Mode相比,可以减少3路PWM输出,对于资源比较匮乏的MCU比较使用。该模式同样可以三态输出,INHx决定三相桥的高低电平,INLx与高阻态有关。INLx=0的时候Hi-z。如若不想输出高阻态的话可以把INLx拉高。
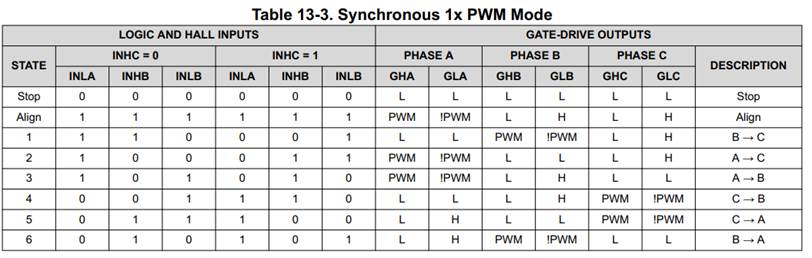
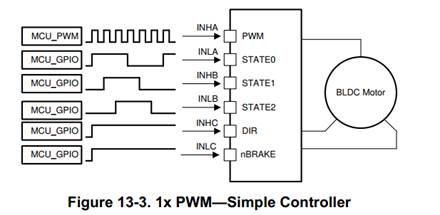
1x PWM Mode:
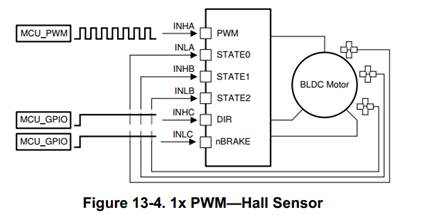
前两种模式很好理解,这个模式有点迷。只用一路PWM就可以控制电机运转(有点像电调)。在DRV8353系列芯片中,内部储存了一个六步换相表(这是FOC的基础)。通过INHA引脚可以控制三相桥输出的占空比和频率。而INLA, INHB, 和INLB作为一个逻辑信号输入,可以直接连接MCU也可以连接霍尔传感器输出信号(INLA = HALL_A, INHB = HALL_B, INLB = HALL_C)。
1x PWM 模式通常使用同步整流运行,不过可以将其配置为在 SPI 器件上使用异步二极管续流整流。可以通过 SPI 寄存器使用1PWM_COM 位来设置该配置。
当霍尔传感器按(INLA = HALL_A, INHB = HALL_B, INLB = HALL_C)连接的时候,INHC用于控制六步换相表的方向(其实也就是控制电机的方向)。不需要的时候可以直接把INHC拉低。
同步模式:
异步模式(需要SPI配置才能启用):
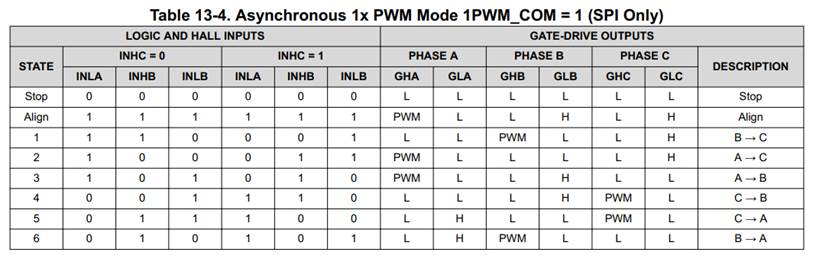
这两种方式本质上就是换相方式不用,既可以用MCU给出换向点,也可以用霍尔提供。
Independent PWM Mode
这个模式给出最原始的控制方式,六颗MOS可以独立的控制开关。即INHA、INLA、INHB、INLB、INHC、INLC各自控制一个MOS。这也意味着可以控制MOS上下直通。但是一般不用用这个模式去控制电机,这个模式被设计应该是用来控制六个负载或者其他组合。比如四个MOS控制一个有刷电机,剩下两个MOS控制两个螺线管。根据需要自由配置。真值表如下所示。
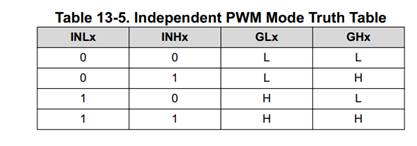
注:切记,此模式下将不再插入硬件死区

驱动器内部对高边和底边MOS有过流监测器 (就是两个比较器)。高低边检测器共用SHx引脚作为比较电压,高低边独立操作的时候,监测机制不再起作用。
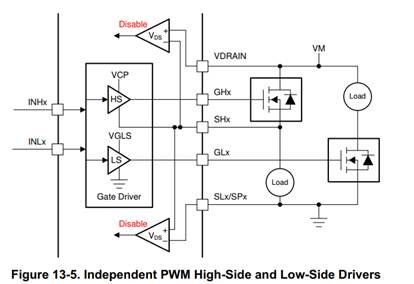
如果只用到了一个输出(无论是高边还是低边),监测器仍然有效。
13.3.1.2 接口模式Device Interface Modes
对于模式的选择TI的DRV8353系列给了两种模式(每种芯片仅支持一个模式),一种是SPI串行接口,另一种是硬件接口。但是同一系列的模式控制引脚都是pin to pin的。
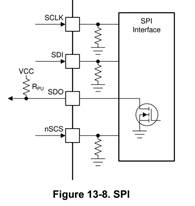
SPI串行接口:
不仅可以配置模式,也可以读取驱动器的信息(如状态、故障等)。SPI的引脚如下SCLK,、SDI、SDO,和nSCS。SPI在这里不在过多介绍。
在这里指明一点:SDO是开漏结构,需要外部接上拉电阻或者配置GPIO为推挽输出
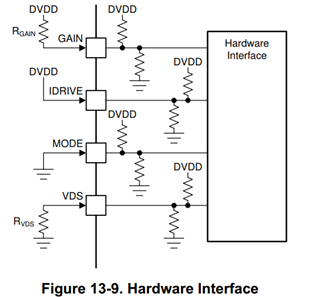
硬件接口:
硬件接口配置:
该接口可以配置芯片的如下参数,每一个参数对应一个引脚GAIN、IDRIVE、 MODE和 VDS.故障输出则是通过nFAULT引脚提供(SPI接口的芯片也有这个功能)。
在这里指明一点:该接口不全是逻辑电平控制,某些pin需要通过外接不同的阻值配置对应的电压(这个后面会专门讲)
13.3.1.3门极驱动器的电压配置
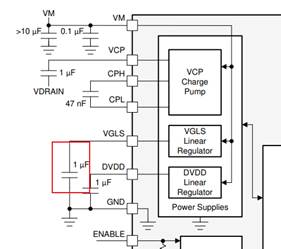
这里实际上就是一个电荷泵,DRV8353系列里面内置了一个二阶电荷泵。电荷泵负责升压,因为MOS的导通条件是在VGS超过一定阈值,高边MOS的源极悬空,为了保证高边mos可以完全导通(打算用这款芯片的人这部分都懂)。电荷泵的输出电压在CP脚可以测量到,输出电压为,有25mA的驱动能力。
小于12V的时候,
(相对于
)。电荷泵会受到持续监测以确定是否发生欠压,从而防止 MOSFET 出现驱动不足的情况。
电荷泵的主体由二极管和电容构成,二极管集成在芯片内部,外部电容需要我们自行外接。VDRAIN 和 VCP 引脚之间使用一个 X5R 或 X7R、1µF、16V 陶瓷电容器作为储能电容器。在 CPH 和 CPL 引脚之间放一个 X5R 或 X7R、47nF、额定电压为 VDRAIN 的陶瓷电容(有一个专有名字:飞跨电容器)。
电荷泵主要是为高边mos服务,低边mos则用的是VGLS线性稳压器。线性稳压器输出电压固定为 14.5V。在实际运行的时候会调节值11V。VGLS 稳压器支持 25mA 的输出电流。VGLS 线性稳压器需要在 VGLS 和 GND 之间连接一个 X5R 或 X7R、1µF、16V 陶瓷电容器。
13.3.1.4智能栅极驱动架构
DRV8353M采用推挽结构驱动外部MOSFET。并且内置了齐纳钳位二极管用于箝位。
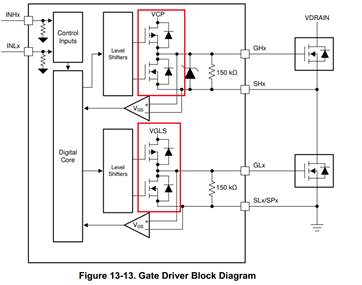
之所以叫智能驱动器是因为有IDRIVE 和 TDRIVE两部分对MOS进行效率和鲁棒性调节。IDRIVE用于栅极驱动电流调节和TDRIVE用于栅极驱动时间调节。具体的值需要根据外部MOS的特性选择。
13.3.1.4.1 IDRIVE: 调节驱动电流/压摆率
IDRIVE调节gate极的栅极驱动电流,电流越大mos导通越快。VDS的压摆率也越大。MOSFET VDS 压摆率是优化辐射发射、二极管恢复尖峰的能量和持续时间、导致击穿的dV/dt栅极导通以及与外部半桥中寄生效应相关的开关电压瞬态的关键因素。IDRIVE 的工作原理是,MOSFET VDS 压摆率主要取决于 MOSFET QGD 或米勒充电区域中提供的栅极电荷(或栅极电流)的速率。通过让栅极驱动器调节栅极电流,可以有效地控制外部功率 MOSFET的压摆率。
电流大小通过硬件或者SPI调节。范围在 50mA 至 1A 拉电流和 100mA 至 2A 灌电流之间。在MOS开启或者关闭之后,栅极驱动器会将电流调小(刚好能维持MOS状态的电流IHOLD)。
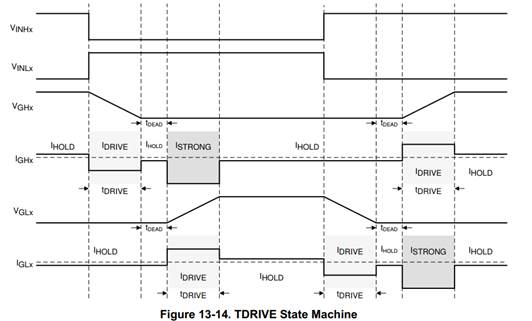
13.3.1.4.2 TDRIVE: MOSFET 栅极驱动控制
TDRIVE的第一个功能用于插入PWM的死区控制,DRV835xF 系列器件使用 VGS 电压监视器来测量 MOSFET栅源电压并确定正确的切换时间,而不是依赖固定的时间值(根据MOS的参数、温漂等进行动态调节)。在此基础上还可以插入一个额外的死区时间tDEAD。
第二个功能是防止寄生dV/dt栅极导通,当MOS开关的时候,TDRIVE机制会使能一个相对于MOS栅极反向的强下拉电流ISTRONG,并且将持续一段时间,这个功能可以防止寄生电荷耦合到MOSFET栅极。
第三个功能是gate极故障监测。比如MOS引脚虚焊,gate故障、gate卡在高电压或低电压。该机制的原理就是在每个G-S输出之间加入一个比较器。仅当MOSFET开关状态发生改变的时候监视外部MOS栅极的电压。在栅极驱动器发出一个gate极电平变换的时候,在经过一段时间tDRIVE后MOS的gate极电平还没有改变就会报一个故障。为了防止误触发tDRIVE的时间选择应该要大于栅极电荷的充放电时间。tDRIVE不会增加PWM的时间,在下一个PWM指令发出后tDRIVE会终止。
13.3.1.4.3 传播延时
传播延时时间(tpd)是指栅极驱动器输入边沿到输出边沿的时间差。这部分延时Digital Input Deglitcher Time(去抖时间)、Digital Propagation Delay(数字传播延迟)、the delay through the analog gate drivers(模拟栅极驱动器的延迟机制与优化)
Digital Input Deglitcher Time用于滤除高频噪声,防止影响输出。
Digital Propagation Delay为实现多模式控制(如PWM、PFM、突发模式)和可调死区时间,系统需在信号路径中植入可控数字延迟模块。
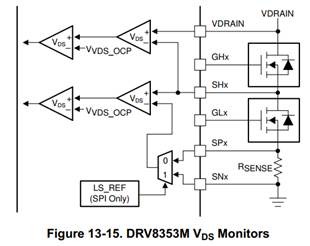
13.3.1.4.4 MOSFET VDS 监测器
栅极驱动器的VDS监测器用于检测MOS过压或者短路。超过监测器的电压阈值(VVDS_OPC)并且超过一定时间(tOCP)后就会报一个VDS故障。
高边MOS监测测量的是VDRAIN和SHx之间的电压。低边MOS SHx 和SPx 之间的电压。如果电流检测没有用到的时候,SP引脚接到外部半桥MOS的GND。
对于支持SPI设备,如果设置了LS_REF 寄存器。低边MOS的VDS监测阈值电压可以被SPx和SNx改变。这仅仅会影响低边,高边还是靠VDRAIN和SHx监测。
这个VVDS_OCP电压在SPI设备中在0.06 V 和2 V,硬件配置的电路调节范围在0.06 V 和1V之间。
13.3.1.4.5 VDRAIN引脚
DRV8353系列提供了一个单独的传感测量和参考引脚,接在高边mos的漏极公共点上。这个引脚叫VDRAIN。该引脚和电源供电引脚VM分离,防止感测线上引入噪声。
VDRAIN也作为电荷泵的参考点,Vcp的变化依靠该点。这可以确保电荷泵基准在电压瞬态条件下相对于功率 MOSFET 电源保持。
由于电荷泵以 VDRAIN 为基准,这也允许 VM 直接由功率 MOSFET 电源 (VDRAIN) 或独立电源供电。这允许实现一个配置,其中 VM 可以通过一个高效的低压电源提供,以提高器件效率。稳定。(VDRAIN作为功率供电。VM为芯片供电,所以VM可以用一个低压电源供电)。
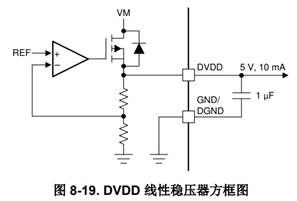
13.3.2 DVDD 线性管理器
DVDD是一个内部集成LDO(5-V, 10-mA),对外部电路提供低压供电。DVDD稳压器的输出应在 DVDD 引脚附近接一个旁路电路(X5R 或 X7R、1µF、6.3V 陶瓷电容器),直接连接回相邻的DGND或GND接地引脚。
DVDD 标称空载输出电压为 5V。当 DVDD 负载电流超过 10mA 时,稳压器的作用类似于恒流源。当电流负载大 于 10mA 时,输出电压会显著下降。
可以使用方程式 1 来计算 DVDD 线性稳压器导致的器件中耗散的功率。
P=(VM-VDDVD) ×IDVDD
例如,当 VVM = 24V 时,从 DVDD 汲取 20mA 的电流会导致方程式 2 所示的功率耗散。
P=(V24-3.3V) ×20mA=414mW
13.3.3 Pin 原理框图
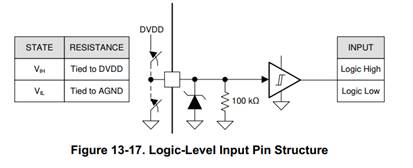
下图描述的是逻辑引脚INHx, INLx, ENABLE, nSCS, SCLK和SDI(前面讲了,SDO是开漏结构)的原理框图。从图中可以看出,逻辑输出引脚内部有一个100k的下拉电阻和一个TVS二极管。
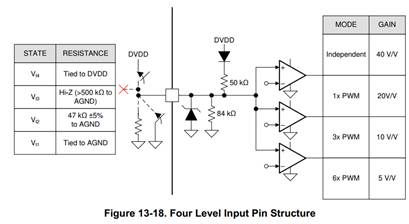
MODE和GAIN是四电平输入结构(对于硬件接口IC而言的)。四电平输入或者多电平其实就是外接电阻和IC内部电阻分压得到不同的电平。从下图可知IC内部有84k的下拉电阻和一个50k的上拉电阻(串联一个二极管,防止电流倒灌影响LDO),同样有并联一个TVS保护引脚。外接不同的阻值可以调节四种PWM模式。
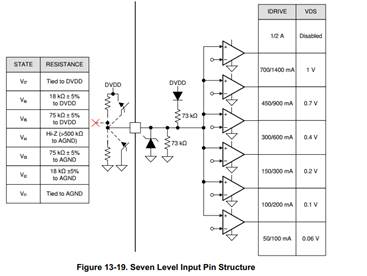
IDRIVE和VDS是七电平控制结构,与上面类似,不在赘述。
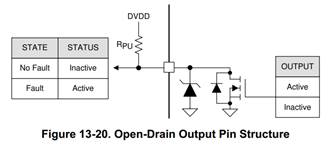
nFAULT 和SDO是开漏结构。因为相对于推挽结构,开漏结构只有一个晶体管(在这里是P型MOSFET),MOSFET的栅极为低时,MOS导通,pin被拉到GND。MOSFET的栅极为高时,pin处于高阻状态。所以开漏结构没有上拉功能,需要外接一个上拉电阻。就SPI通信而言,用过改变外接电阻的阻值可以调节上升时间。
13.3.4 电流放大器
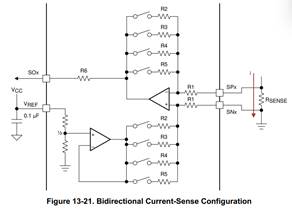
DRV8353M内部集成了三个低边电流检测器。通常用于过流检测、扭矩控制、无刷电机换相。三个电流检测器可以分别用于检测三个半桥的电流,也可以只用一个检测三个半桥的总电流。电流检测器这里有三个点需要注意:放大增益、补偿校准、单极性还是双极性、电压参考引脚(VREF).
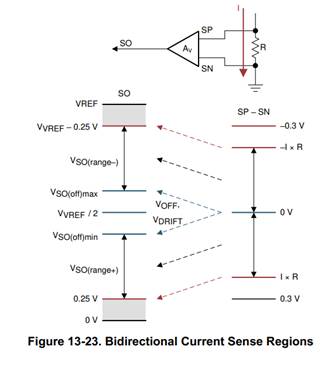
13.3.4.1 双极性感测
电流放大器本质上是一个运放,输出引脚Vox是采样电阻两端的电压乘以放大倍数(5 V/V, 10 V/V, 20 V/V, and 40 V/V)。计算方法通过下式计算。
放大倍数调节的原理是选择不同的反馈电阻,有5 V/V, 10 V/V, 20 V/V, and 40 V/V 四种放大倍数可选。
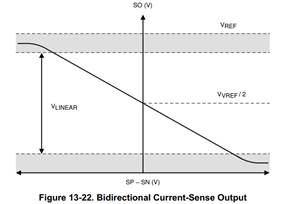
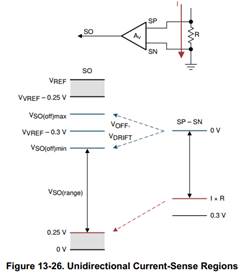
在选择放大倍数的时候需要根据实际需要的最大电流计算, 最大电流不超过SOx的最大限制。电流放大器在大电流时是非线性输出,所以最好将输出控制在线性区,如下图所示,输出幅值控制在VREF-0.25V。在零电流附近会有零漂现象,放大倍数不宜太大。根据需求综合考虑。
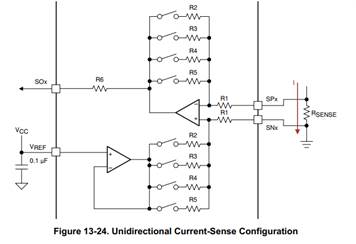
13.3.4.2 单极性感测(仅支持SPI的设备)
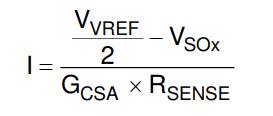
单极性感测模式通过SPI对VREF_DIV 位进行选择。该模式下的计算如下:
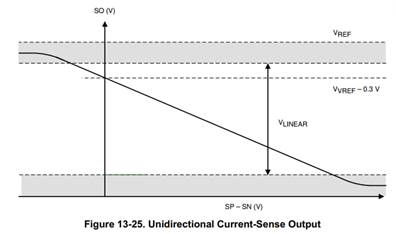
电流的大小和SOx输出的关系如下图所示:
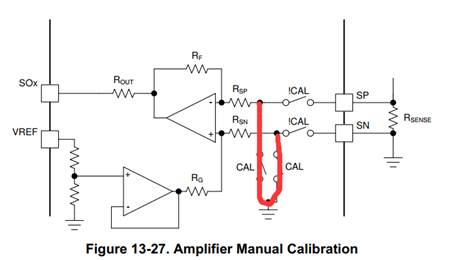
13.3.4.3 放大器自校准
为了抑制尽量减小零漂和温漂对精度的影响。放大器有一个校准模式,通过寄存器CSA_CAL_X进行控制(仅支持带SPI的IC)。寄存器CSA_CAL_X实际上是控制内部的开关将运放的输入端短接,此时不再对电流采样。最好是在半桥关闭状态进行校准,防止噪声对校准过程产生干扰。
上面讲的是手动校准方法,仅支持SPI设备。DRV8353系列在SPI和硬件接口都提供了自校准模式。在上电并且VREF达到最小工作电压之后自校准开始。需要注意的是VREF达到最小工作电压之后需要留出50us的时间用于自校准。自校准完毕驱动器进入正常模式。

















 918
918

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









